Please report any bugs in this thread.
Just upgraded, am experiencing the same issues people reported on the update thread. Have a Biss-B encoder on a AKM54K. After running commutation setup the centered wheel is reported at 360 degrees. Restarting the config tool and/or simucube has no effect. Re-running the configuration wizard does not resolve the issue.
Even more frustratingly disabling the commutation setup by going through the wizard again causes the wheel to incorrectly detect the sensor point after phasing - 300+ degrees, not only is it a revolution too far, it is also some other amount off, so it’s just wrong and un-usable 
Both cases are made even worse by the fact I run bump stops at 540 - so the wheel jerks quickly to get out the bump stops on startup, wrapping my cable round the wheel mount.
As it stands I’m going to have to downgrade back to 9.10, this version is just broken for me. Let me know if I can help with anything @Mika
And now I’m getting an Initialization Fault (Fault location ID:O) - the motor won’t even phase, its literally unusable All I did was run the setup wizard one more time, closed config tool and power cycled simucube.
Debug logs would be nice, but let me try to repeat the bug first. I have an idea what is happening.
Only the 0.10 line is supported now, but if a previous version works for you, then that it of course fine.
What does Granity say about this?
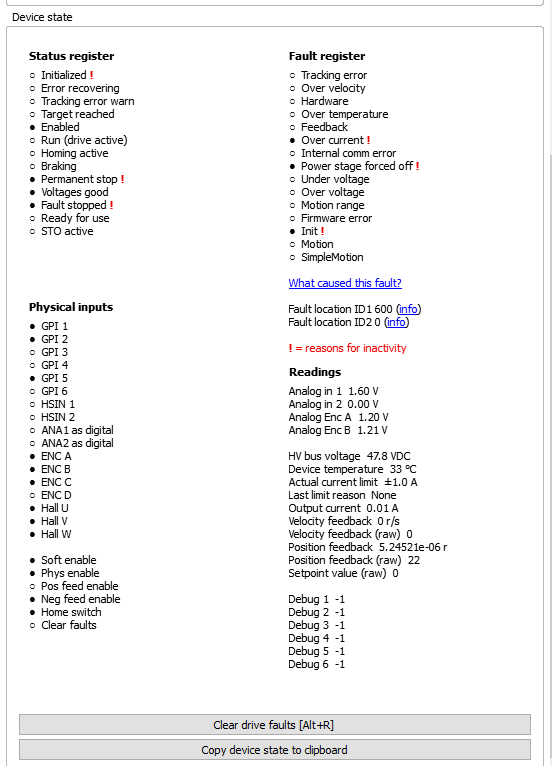
Right so, the motor won’t init at all anymore. Granity is reporting OverCurrent, Power stage forced off, Init Fault registers.
Status registers: Enabled, voltages good, fault stopped and !Initialized
Fault location ID1 600, ID2 0
What are your current settings in Granity?
I haven’t changed these settings since initial setup like 4 months ago - however a lot of the settings don’t match up to what I remember setting them too…
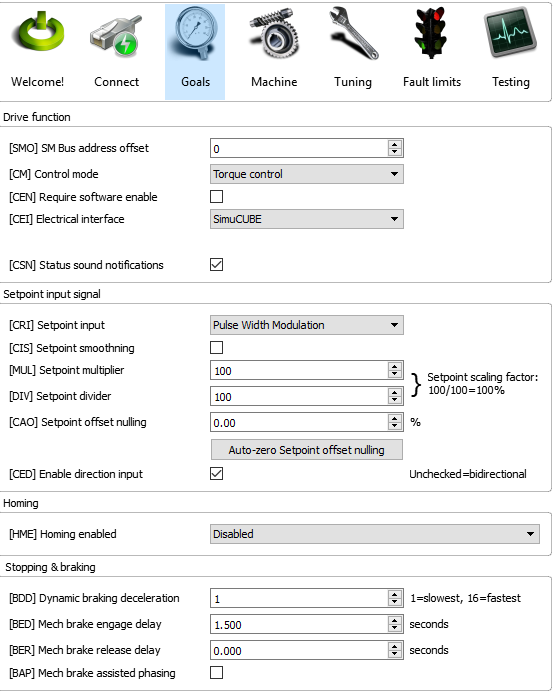
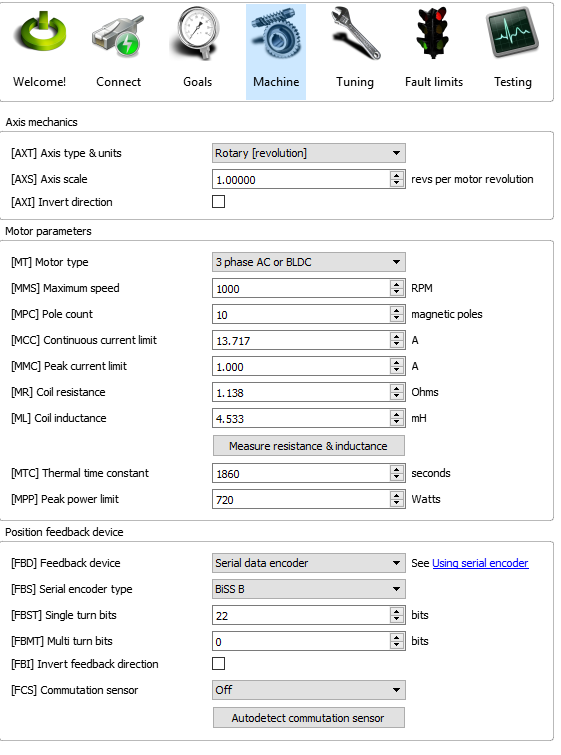
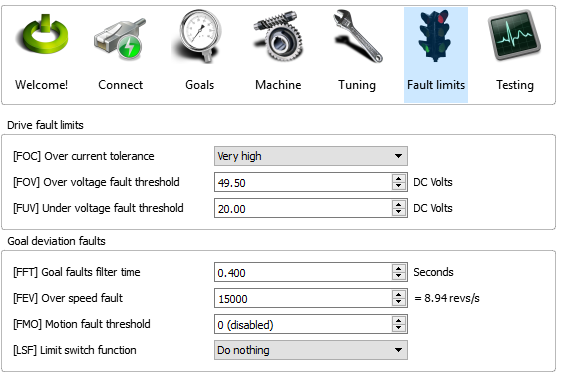
At least peak current limit should be higher than the constant current limit, and over current tolerance should be set at Maximum.
Yep - upon resetting Peak current limit to what i was (25A), I got the drive to init, thank goodness. I did not change that param though, I literally just did an irace an hour or so ago on this.
It could be that the wizard somehow set that value, and when/if you canceled some part of the wizard, the wrong value was saved to drive.
I will have a look if this hypothesis is correct, and try to make it more bulletproof.
Phew, alright, I re-set the peak current AND the commutation sensor in Granity, re-ran the simucibe configuration tool, and all is well now, including getting the correct center point without phasing.
1 Like
Additional information about what the USB checkboxes do here:
once your motor is unusable and you get overcurrent errors etc… you have to go into granite software, reload the DRC file for your motor/sensor, (i got the system from SRB, and the DRC file is uploaded into their website) then go to simucube software rerun the wizard and when you get to the step that asks you about auto commutation, DO NOT CLICK ANYTHING, just click next. and finish the wizard. That should work for now.
1 Like
Yeah, it works, Biss-C here, before I had -360 now is 0. No phasing, the wheel is always perfect center. Nice.
1 Like
OK, so maybe the drive requires an additional restart somewhere in between doing the commutation sensor setup and centering steering. I will debug this soon.
So first wizard run with auto commutation then hardware restart, then second wizard run without auto commutation. There must be 2 wizard runs anyway (with Biss-C… etc)
good data, and is in line with what I am thinking. I will get to bug fixing mode tomorrow.
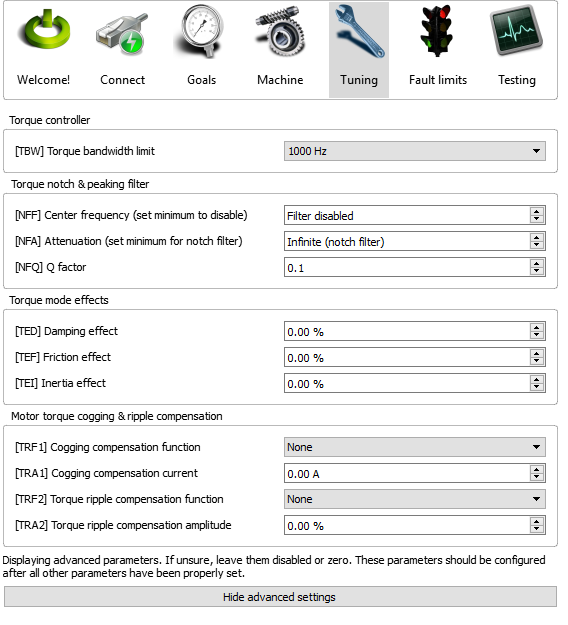
found a bug already. It turns out that writing resetMaxMMC; isn’t the same as resetMaxMMC();

That would be the cause for MMC changing to low value when user clicks “clear autosetup commutation settings”.
Also, a fix is already designed for the other bug.
Edit: and fix is now completed. Needs testing tomorrow!
4 Likes