I can tell that the issue cannot be a result of a failed update or anything like that, as our firmware binaries contain a checksum and validity is checked on each run, so if an update fails, the firmwares will not be run at all. And firmware data is binary data, either 0 or 1… Please tell me this forum does not contain those people who upgrade to gold-plated connectors for optical audio cables, raise their speaker wires off the ground, or such nonsense  …
…
4 Likes
Hehe,
I can tell you that I’ve got a very plain setup & the grainy noise happened on upgrading 2020.1->2020.3 the first time, went away downgrading 2020.3->2020.1 & then did not come back upgrading 2020.1->2020.3 again…
Since I have not done it more times I can not rule out if it will happen on x% of upgrades, so if I did it 10 times more, maybe it would happen again…
Speculating that to be unlikely 8)
I don’t know the ram configurations, what stays, what is cleaned when etc, but I am also speculating it could be some dirty ram somehow. I assume all is cleared to 0’s or so on an upgrade, which would prob. rule dirty ram out as well…
Sorry for even speculating, I know that can be annoying when I really have no knowledge of the setup.
Just FWIW
I had the grainy issue (first batch) downgraded and after few days upgraded, no more issues
I don’t have any of those fancy cables and stuff - but I am old and fail at technology 
Hahahahahaha… funny hahahaha…
as i said some post ago… "IT and Software development are a Science. 2 + 2 in this solar system result in 4 on any part of this planet based on mathematics laws. Honestly , to me, is impossible that an upgrade can cause all this problems for some users and other don’t. I insist possible issues caused by rigs/gear combinations just like the Simulaje F1S.
They make you crazy for nothing
Today we have the following to control bumpstop:
- bumpstop strength
- damper
- ramp up angle
What are the values of those for new predefines?
Will we have custom option as well?
Thanks
1 Like
Strength will be set at 100% for all, as it is important to not allow the game FFB signal to overcome the bumpstop effect force.
Damper will be investigated and optimal setting found.
Ramp angle will be (provisionally) 20, 10 and 5 degrees. For each of these a good damper setting will be tested.
No custom option. We are not seeing many people playing with these settings anyway, so the improvement will be for the better user experience and to streamline development.
6 Likes
And, the bumpstop setting will be completely a per-profile setting. Might be more useful feature in itself than the over complex parameters.
3 Likes
Hi Mika, any idea for a better implementation / semplification of direct input effects?
1 Like
Hello Mika,
This is very good… dump stop per Profile is very good.
I know that is very boring the following request but can you include a feature that detect the vehicle and ( if present ) load a dedicated profile from TD?.
Useful for iRacing. For iRacing the necessary code is already available on github and detect both cars and tracks.
1 Like
I like the idea. I have mine set to 100% strength, 20% angle, and 10% damping.
For me it is a set and forget option so if for each new profile I have to adjust it again it will be annoying. Will there be a way to set the default for new profiles?
The bumpstop damping seems very broken currently. If you create a test profile with 0 damping, friction, and inertia, set bumpstop strength to 100% and angle to 20 deg, then increasing the damping makes hitting the bump stop harder. At 99% damping it is like hitting a solid wall that kicks back hard!
It also seems as though the ramping up of the resistance over the Bumpstop Angle is linear (Maybe this is the cause of the kick back issue). If that is the case then it would be better to ramp up the resistance using a parabolic curve to prevent that hard hit.
Hi Dirk,
Did you ever figure your losing USB connection out?
I am asking since another user has the same problem, it seems.
I suggested him that maybe it’s caused by the power from outlets not able provide the required watts.
So if you did not yet find a solution, maybe try to pull a cord from another electric group in your house & plug the power supplies in to that?
For DirectInput effects, we are thinking on what to do. For example, the recent discoveries about sawtooth effect are interesting. Sawtooth always goes in the positive direction, and offset parameter for it tells the starting level. But it appears that games are using the offset parameter to tell direction, which is directly wrong when looking at effect specifications as written by Microsoft. But, we shall fix that at some point.
Typically, the sawtooths and sine waves and whatever are just much much too strong on DD wheels with full torque, if the effects are implemented according to specifications. We might be implementing a simplified game effects slider that would set all effect strenghs with a single slider. Maybe the current 50% level will be new 100% on those.
5 Likes
As we are on bumpstops subject, can we also do something with bumpstop range.
- make it default to steering range every time steering range is changed, with ability to change afterwards
- use the same type of edit control as for steering range, edit box with spinners instead of slider. Using different way of editing the same type of value (DOR) is odd, plus makes it harder to get values in sync, I still can’t get both of them to 1080, it’s either 1082 or 1078 for bumpstop range.
Thank you
1 Like
if you press enter in the dor space, the bumpstop range will match that number in automatic. it works that way since simucube1.
good idea!
I will check that minimal increment for the range is 1. If you click on the slider,you can use arrow left/right to fine tune.
1 Like
Didn’t for 1080, was always off. 
@Mika, may be even better idea.
Just make it as an offset degree from steering range, negative or positive, default 0.
And arrows skip values too.
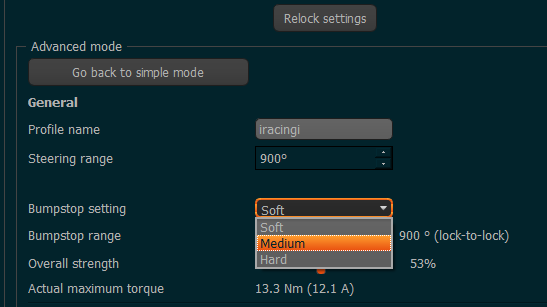
Hi, Could someone post a screenshot of the default iRacing True Drive values please as I have lost mine, thanks.
you can get them via the add button, it will create a new profile that does not overwrite your current profile.
1 Like