You have non-standard app.ini file in iRacing. The default setting there is to create a damping effect.
should we use iracing original ini?
Yes, there is no reason to use customized things if one does not know what effects each setting there have.
1 Like
When i test it with extrem oversteer and the wheel comes to the bump stop and i use vanilla app.dat, when it hitting very agressiv agains the bumpstop.
But, normaly, you can better withsteering
BumpStop_Deg=180.000000 ; degrees into bump stop before max force
(normaly 45°)
DirectInput Friction is not working as It should, Mika is refering to app.ini line DamperMode:2 as your iRacing app is creating Friction effects.
Is not an iRacing issue because non other wheels have those phase related problems
[Force Feedback]
allowXBoxOneOnWindows10=0 ; Set to 1 to talk to xbox one game pads on windows 10, warning the driver is buggy
alwaysRestartFX=0 ; Always restart force when updating it, set to true if wheel goes limp after a while
calibUsingRawData=0 ; Use raw joystick position over windows calibration data when detecting new joysticks
centerSpringPct=-1 ; Percent (0-100) of static centering spring force to apply, -1 is off. Not reccomended for use.
damperMode=0 ; Set damper effect type 0 = Damper 1 = Inertia 2 = Friction
damperSaturation=10000 ; Set damper saturation from 0 to 10000
dampingSliderSetsFriction=1 ; True if damping slider adjust friction effect, false to adjust wheels built in damping effect
debounceSeq_Ms=60 ; Add delay in Milliseconds to sequential shifter to reduce double shifts
disableAutoCenter=1 ; Turn auto center off on all force feedback devices
displayLinearInNm=1 ; Display the force level in peak Nm when using the linear mode
enableHotPlug=1 ; Set to 0 to turn off usb hot plugging in case you have usb disconnect issues
enableWheelDisplay=1 ; Enable the use of steering wheel displays
enableWheelDisplayBlink=1 ; Enable the display lights to blink when at the rev limit
FFBUseForceLimiter=1 ; 1 - limit force of impacts and oscillations
FFBUseSimpleMinForce=0 ; 0 - Use smoothed min force, 1 - use old sharp min force
forceNoiseSuppression=0 ; Remove noisy joystick axis, even if they are calibrated by hand
forceResetBeforeStartup=0 ; Force a reset of the whole FFB system every time we create or destroy a FFB effect
initOnlyNewDevices=1 ; Set to 0 to force all devices to reinitialize when a device change is detected
invertFFBForce=0 ; Reverse the force feedback effects, if your wheel is spinning the wrong way
joyEnableVibrateAllXInputWithPedal=0 ; Vibrate all XInput devies when pedals vibrate, or just the one used to steer
joyEnableVibratePedal=1 ; Enable physics based vibrations in some pedals
joyEnableVibratePedalBinary=0 ; Use a digital on/off mode when vibrating pedals, default is to continuously change v
joyEnableVibrateThrottleWithPedal=1 ; Enables throttle vibration when brake pedals vibrate
joyEnableVibrateWheelWithPedal=1 ; Enables wheel vibration when pedals vibrate
joyVibratePedalMaxPct=90 ; Maximum threshold of lockup when pedal vibrates at 100%.
joyVibratePedalMinPct=10 ; Minimum threshold of lockup before pedal starts to vibrate.
reinitFanatecWheelDisplay=0 ; reinitialize the fanatec wheel display when reconnecting devices this may cause issues
resetWhenFFBLost=1 ; Attempt to reset device when force feedback interrupted by SteamVR or another application, may cause a momentary loss in steering
seperateXBox360Triggers=1 ; Set to 1 to seperate the XBox 360 joystick triggers into there own axes
steerAverageSteeringTorque=1 ; True averages 360 Hz data down to 60 Hz, false uses last sample
steeringBumpStop_Deg=90.000000 ; degrees into bump stop before max force
steeringDampingFactor=0.050000 ; Damping factor adjust down if damping becomes unstable, defautlt to 0.05
steeringDampingMaxPercent=0.000000 ; Maximum amount of damping to apply, adjust this to set damping level, values between 0.05 and 0.2 are best, overriden by damping slider
steeringDampingParkedMaxPercent=0.050000 ; Maximum amount of damping to apply when parked, adjust this to reduce wheel oscilation when parked, values between 0.05 and 0.30 are best
steeringFFBSmooth=1.000000 ; Percent of current FFB force to use vs average force, 1.0 = no average 0.001 = max average
steeringForceParkedPct=0.500000 ; Reduce FFB force by percent when parked, to help reduce oscilations
trueForceEnabled=0 ; Enable TrueForce API in Logitech TrueForce wheels
trueForceVibeEnable=1 ; Enable vibrations in Logitech TrueForce wheels
trueForceVibeGain_dB=10.000000 ; Adjust volume of true force vibration effects
trueForceVibePhysics=1 ; 1 - use physics to generate vibrations, 0 - use game audio with Logitech TrueForce wheels

1 Like

Hello everybody. can share the configs they use on Simo. Conf. Tool and FFB they use in Ircing??!!
Thought I’d share my settings and some insight because I consistantly see folks asking for settings and they seem to run one generalized set of parameters as default for all cars. There are too many differences in the cars to do this and to get the optimal response you should customize the settings per car. I did run iRFFB months ago but have been able to closely approximate the same feeling without it. I always found that iRFFB allowed me to effectively control and catch slides and feel the tire grip. With these settings I get feedback very close to iRFFB without any lag. From time to time when iRacing updates its sim, these parameters need a small tweak.
Perhaps some will like my settings and I am curious of the feedback from the community for those who care to give it.
My approach has been to maximize the following:
. no oscillations
. realistic wheel self centering after 90 degree quick turn and release
. control of recovery from spins
. feeling of tire grip through corners
. smooth feedback, no rubber band feeling
I follow a standard approach to setting this up for all the cars for consistant results I’m happy with.
I run a Simucube 1 with a Small Mige and Sincos encoder. I have the mige motor running at 16Amps giving me about 25NM max force.
In the app.ini file
[Force Feedback]
damperMode=1 ; Set damper effect type 0 = Damper 1 = Inertia 2 = Friction
I typically run iRacing force around 48NM to 63NM, custom for every car, and its subjective as well plus force has an effect on how the filters respond.
Here are some settings:
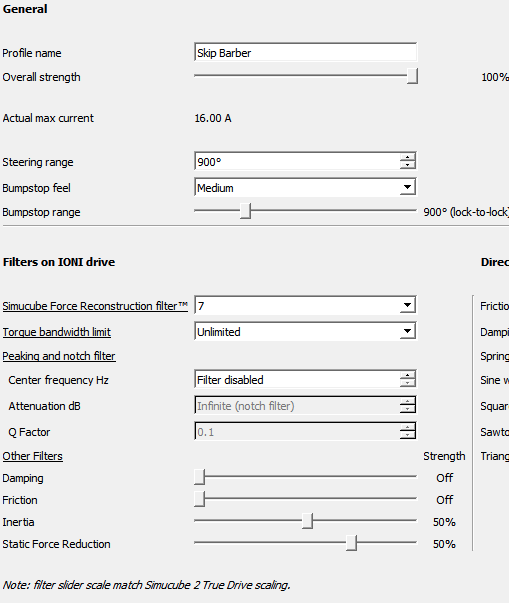
Note that these come from the exported ini file.
my bumpstore range is 900 degrees but its recorded as 0 in the file
I use Bumpstop feel - Medium
torque bandwidth - unlimited
Ferrari GTE
steeringrange=900
bumbstoprange=0
overallstrength=100
ioni_reconfilter1=7
ioni_torquebandwidth=11
ioni_peakingnotchfilter=655360
ioni_damping=140
ioni_friction=80
ioni_inertia=490
ioni_staticforcereduction=2200
bumpstopsetting=1
In game, 63NM
Skip Barber
steeringrange=900
bumbstoprange=0
overallstrength=100
ioni_reconfilter1=7
ioni_torquebandwidth=11
ioni_peakingnotchfilter=0
ioni_damping=10
ioni_friction=0
ioni_inertia=500
ioni_staticforcereduction=5000
bumpstopsetting=1
in game, 48NM
Lotus 79
steeringrange=900
bumbstoprange=0
overallstrength=100
ioni_reconfilter1=7
ioni_torquebandwidth=11
ioni_peakingnotchfilter=0
ioni_damping=80
ioni_friction=20
ioni_inertia=480
ioni_staticforcereduction=2400
bumpstopsetting=1
Thanks for posting @sebj
Interesting approach, I have been using more or less the same profile for all cars in iRacing since I purchased the SC1 (over 4 years ago). I have different in game NM settings for many cars, like you trying to stay within the 45-65NM range for all cars.
I’m using Biss-C encoder that I think is similar to the SinCos, just a little less ‘grainy’ in feel.
What version of the SC1 software are you using? Must be a pretty old version as the filter values do not correlate to what you have - I recall them being very large numbers like this, but that’s a long time ago now (2+ years?).
I think the new values divide old ones by 100, rounding up or down to the nearest whole value.
There’s no option to set the ‘bumpstoprange’ to ‘0’ - lowest is 180 degrees (slider max to the right hand side). I’m going to guess that your value of ‘0’ is the same as the degrees of rotation, so you feel the bumpstops at the limits of each car’s steering degrees of rotation?
‘Bumpstopsetting’ is now called ‘Bumpstop Feel’ with 3 values - soft, medium and hard. Perhaps ‘1’ is ‘soft’.
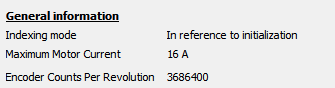
How are you getting 16A to your SC motor? The max is 12.86A, but that may be the newer software.
Could you share a screen image of your SC1 config tool?
At least that way I can see how far the sliders are moved.
Will test out your settings and let you know my thoughts.
Cheers!


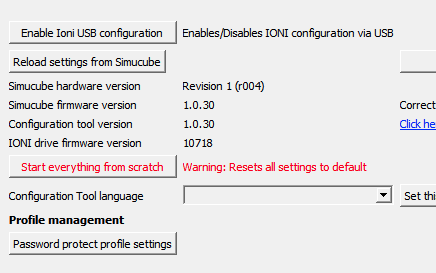
The version
To get my mige up to 16A you need to edit the value in Granity.
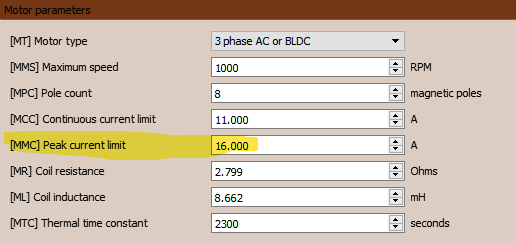
16A * 2.2 * 0.707 = 24.9NM
Never had any problems for the last 4+ years running it like this.
That is basicly “overdriving” the motor and especially the PSU, so the system becomes more voltage limited and thus cannot reproduce the requested torque when wheel is turning at high speeds. Also more power is wasted into resistive (heat) losses.
But it is very unlikely that the motor would suffer from this in simracing use case.
12.86 A will give out 20 Nm of torque while staying within the rated resistive (heat) losses in the motor.
I have an IONI Pro and a 600W power supply. I havent run into any issues. Motor never gets warm.
I have the latest Hardware and Formware version…
the values are the same??!!
hardware version-Revision 2 (r005
firmware version-1.0.40
configuration tool version-1.0.39
IONI drive firmware version 192020
I don’t see why not.
Ultimately, try it. Adjust a little if you like it.
If not, drive around trying one filter at a time, scaling it up and down. Then you’ll figure out how they make ffb feel. Then two, adjust both. Then three, adjust if necessary as filters will affect each other.

Thanks @sebj
I guess the settings you originally posted were from an old version of SC software, as your newer images show updated information, which correlates with the newer SC softwre. Thank you for sharing!
I haven’t tried using the option you have in the iRacing app.ini file for ‘damper mode’ where you have it set to ‘friction’ instead of the default ‘damper’. I’m keen to try this to see if it feels any different!
Regarding the overdriving of the motor, I never use the maximum of the motor’s capabilities as it is right now. At 12.86A, I rarely ever go above 75% of the total strength in the SC app, which gives very strong steering with in game NM around the 47-54NM range on most cars, especially open wheeler cars.
This is plenty strong for 1 hour races, so I do not see any need to push the motor beyond it’s rated limits, let alone even use the maximum limits! My shoulders would be on fire after a race! 
Why do you have such high static force reduction? I have always read that less is more, with most recommending less than 6%. Can you explain how this impacts the feel of the wheel when driving?
Thanks again, I look forward to testing these out today.