Setting number 1 for that is already quite minimal “just put it on” -setting. We simulated the filter in Matlab. Steps in between the other possibilities might be added in the future, when we remove some of the obviously too large settings.
1 Like
@Mika are you still planning to have multiply input HZ sample rates for the reconfilter?
Im also curious how far percentage wise in development the FW is? Roughly.
We considered that at the beginning as the sample data that I supplied to Tero was from iRacing. Afterwards we did simulate that for other input data rates, and found that at least in theory, it works roughly as intended for also other data rates.
Well, I’d say about 90% ready to call this “non-beta”, still got some effects to do. Today I’m trying to get debug data from SimuCUBE to configuration tool - that is required feature to be able to debug issues when giving official support via our support tickets etc.
1 Like
Thanks for the info
So from that can we expect to see it fine tuned in the future?
Of course. I think we’ll make a survey of settings that people are using, then remove the unpopular ones (my guess is, from the high end…) and then add some intermediate things.
This is not fast thing to do, as need to simulate first, and then the new versions would be in the Ioni firmware, which release pace isn’t as fast as SimuCUBE’s.
1 Like
No problem what we have at the moment is fantastic and its a solid base to build upon ! 
I converted to 0812 last night and restarted SimuCube - PCars2… It was horrible, low force, no connection, spent about 30 min playing with every setting… Terrible disconnect.
Hard booted the simucube… everything fine, great fidelity normality restored… VERY important as stated before, re-boot the simucube after updates.
Hmm…
I think the sequence of events in this case might go as follows:
- simucube starts, set MMC according to your force strength
- firmware update
- new simucube firmware starts and reads the MMC setting from IONI, expecting it to be at the nominal highest value
- simucube scales THAT value according to your setting…
repeat X times and your maximum MMC will be 0 at IONI
I will add a command before going to firmware update mode to set nominal MMC to IONI.
And that has been patched, to be included in next firmware version.
Hi Mika,
As per Whatsapp, I had one small bug with new fw. Flashed as per normal, did a hard restart. But ffb was funny and harsh, like pre- reconfilter days. Then had motor interlock error, seems it tripped on FUV. That’s been set to 35 for ages, but reduced it to 20 anyway.
Restarted setup again, and now all working very well.
TBH, this version ffb is feeling the best I have felt for a long time, since <0.50’s. Would be good to keep this as good baseline and Guys can select their recon filter settings around this base. Super work, thank you! This is now significantly better than my Bodnar SS2 feeling.
Cheers,
Beano
3 Likes
i totally agree best ffb yet, and i only have been around since the public beta release. but that 2500hz makes a big difference feels more refined and also less oscillation!
1 Like
to be honest, i bought this OSW to AUGURY and this values are by default…I´ve never touched it…I don´t know what negative impact that can cause…So…
This value should be calculate , if i´m not wrong…
Any advise are welcome 
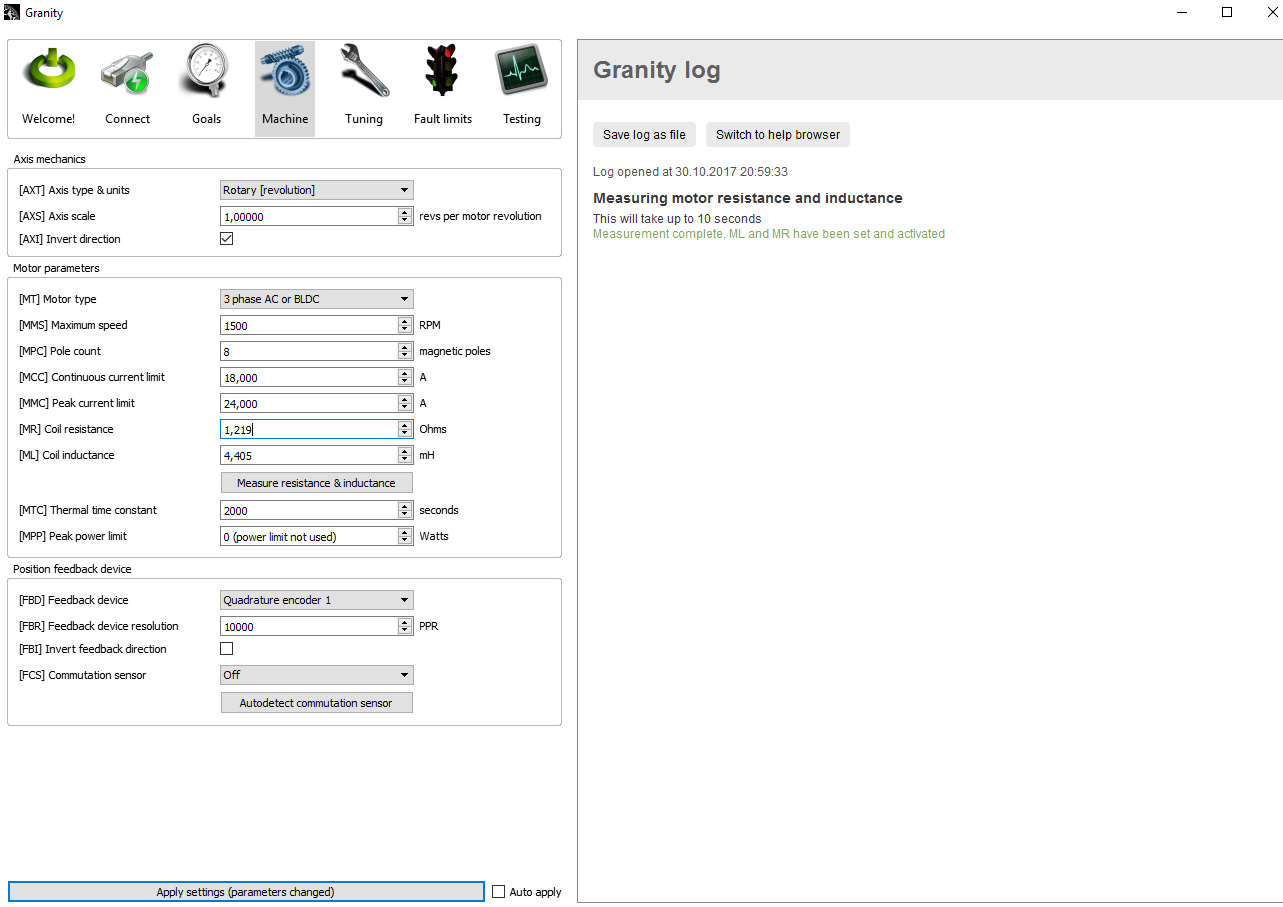
What values are you worrying about - MCC and MMC are depending on your motor (granity wiki has info about the miges …)
Coil resistance and inductance should be measured individually for each motor using the measure button below the inductance field.
1 Like
MMC - Peak Current Limit: (parameter = USER_DEFINED) -
This parameter sets the peak of sine current to achieve a specific maximum output from the servo. This can be used in conjunction to tune the wheel to achieve certain effects. Generally speaking the higher the number the more Nm or torque your servo is capable of producing. The amount of amperage the IONI can output is dependent on the servos rated maximum torque and the IONI type used (IONI Pro = 18A, IONI HC = 25A) The maximum MMC for specific common is listed in the “Common OSW Servo List” In order to find your maximum allowable MMC for your servo please refer to your manufacturer documentation for the servo you are using and do the following calculation - (peak Nm / torque constant) x 1.1412 - if your number is higher than the IONI rated output then the maximum MMC that can be used is that of the IONI limit.
1 Like
Thank you very much Phil
I have read that it is advisable to put 2A below the max value.
I have put 20A instead of 25A, and I have noticed more smoothness in the sometimes abrupt response of the OSW, for me it is better. It is only a personal opinion:wink:
1 Like
http://members.iracing.com/jforum/posts/list/3517883.page
Here you have more information if it is of your interest
1 Like
Hot sure where you read that … about 2A less than max on MMC as that is the number that controls your maximum power from your servo… So if you have the large Mige and want to allow it to run out to its full power you would set it at 25A and if you have the Small Mige you would set it to 12.86A… anything lower on these and you are cutting back the full power potential of your servo.
1 Like
He probably read that MCC should be 2A less than MMC which would make more sense.
Also you have a smal typo in your documentation in the part he quoted.
(peak Nm / torque constant) x 1.1412
should be
(peak Nm / torque constant) x 1.4142
Opps I will fix that… actually now with the new firmware i tend to suggest a MCC = to that of your servos Constant torque rating which is around I think 7 for the small mine and 10 for the large… I have those actual numbers somewhere… the reasoning though is that this will basically avoid the MMC/MCC spread initialization failures that occur at times.
I will go fix that… Probably there and in the SimuCUBE thread there as well since most was a copy over.
Yes, you’re right, I put 20A to do a test, the result was a lower saturation, less roughness in the MOTOR’s reactions, that’s why I wrote: that was my personal opinion.
I think, that 25A will never be used, you would break your arms, and of course, I mean MMC = peak current limit, in granity.
I only ask with the intention of learning, all information is welcome and very grateful
I have confused the parameter, I read this:
-MCC - Continuous Current Limit: (parameter = USER_DEFINED) -
This Parameter sets the continuous current that your servo can handle. Generally speaking the use of the OSW does not always have a continuous current as it is always changing. Due to the manner in which the IONI runs through initialization it is good to set this number at least 1 - 2 A below that of the MMC value … You could also set it to your servos manufacturer documentation for continuous use of your servo by multiplying their RMS value by 1.4142 and using that number.
But I was referring to MMC, thanks for the clarification.