You must update to latest version of Granity.
I update at the last version(sorry) but the problem persists
I send my config in granity help me please
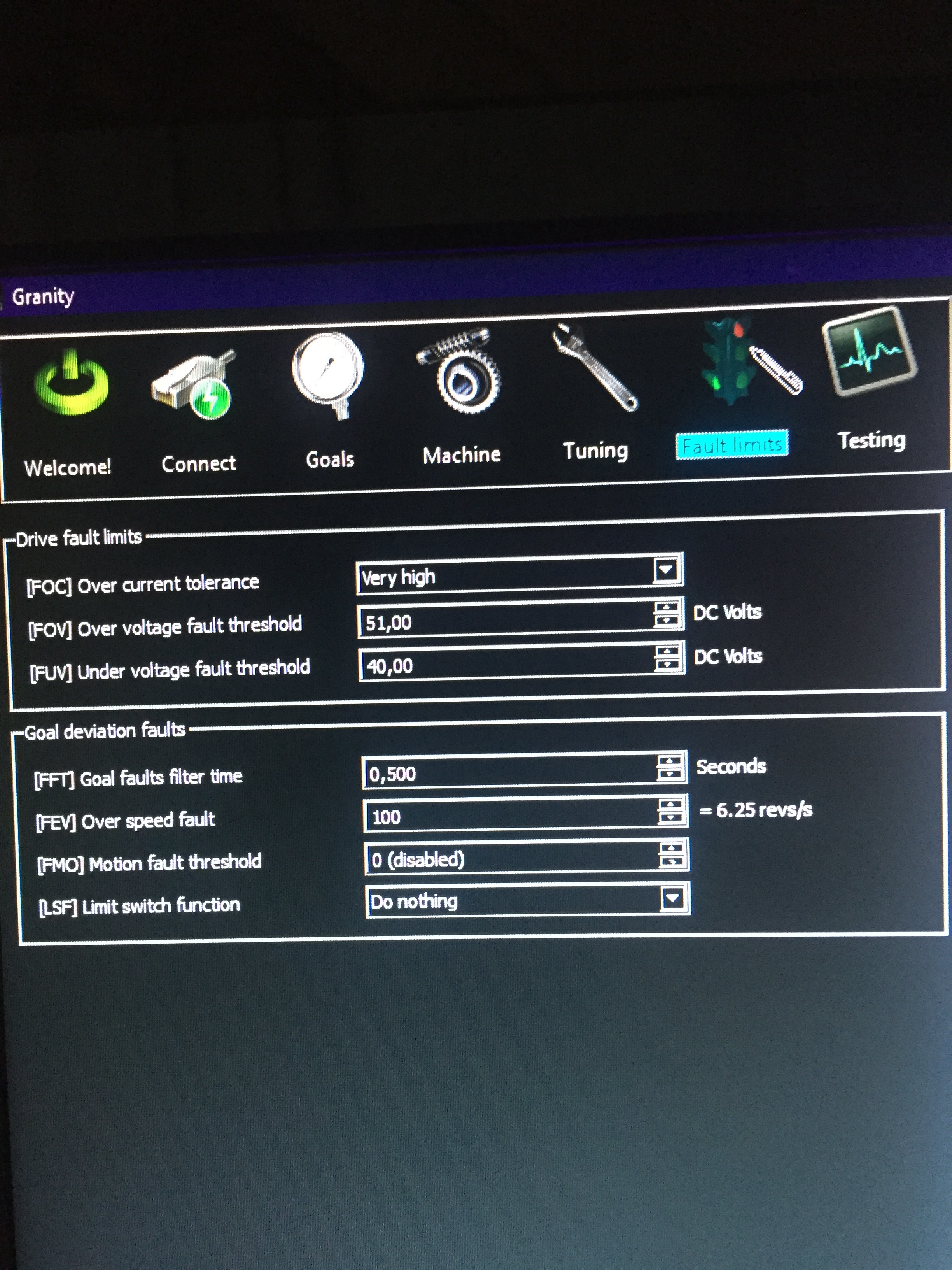
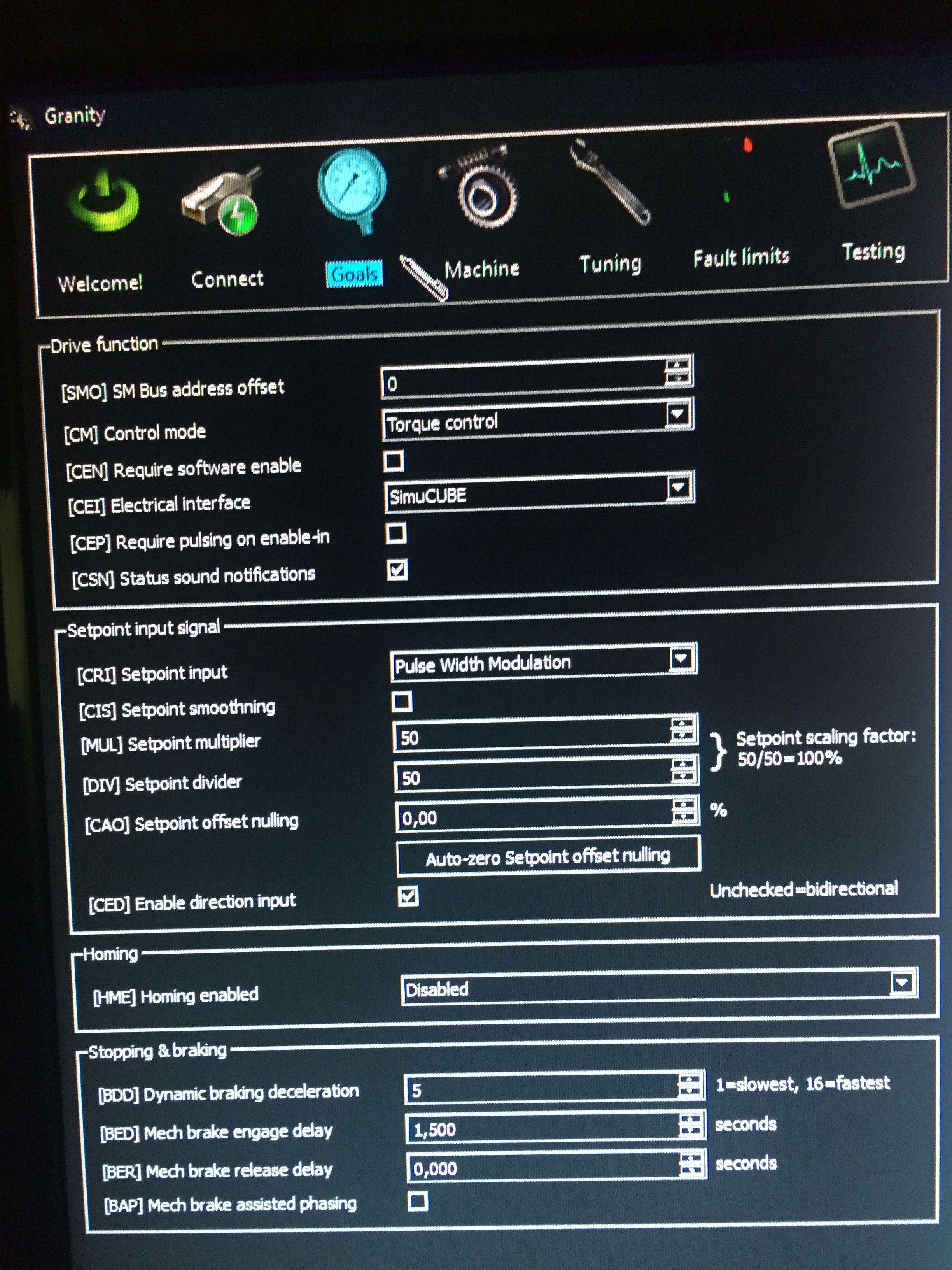
For start, you should put Over Current Tolerance (FOC) to Maximum.
Salvatore,
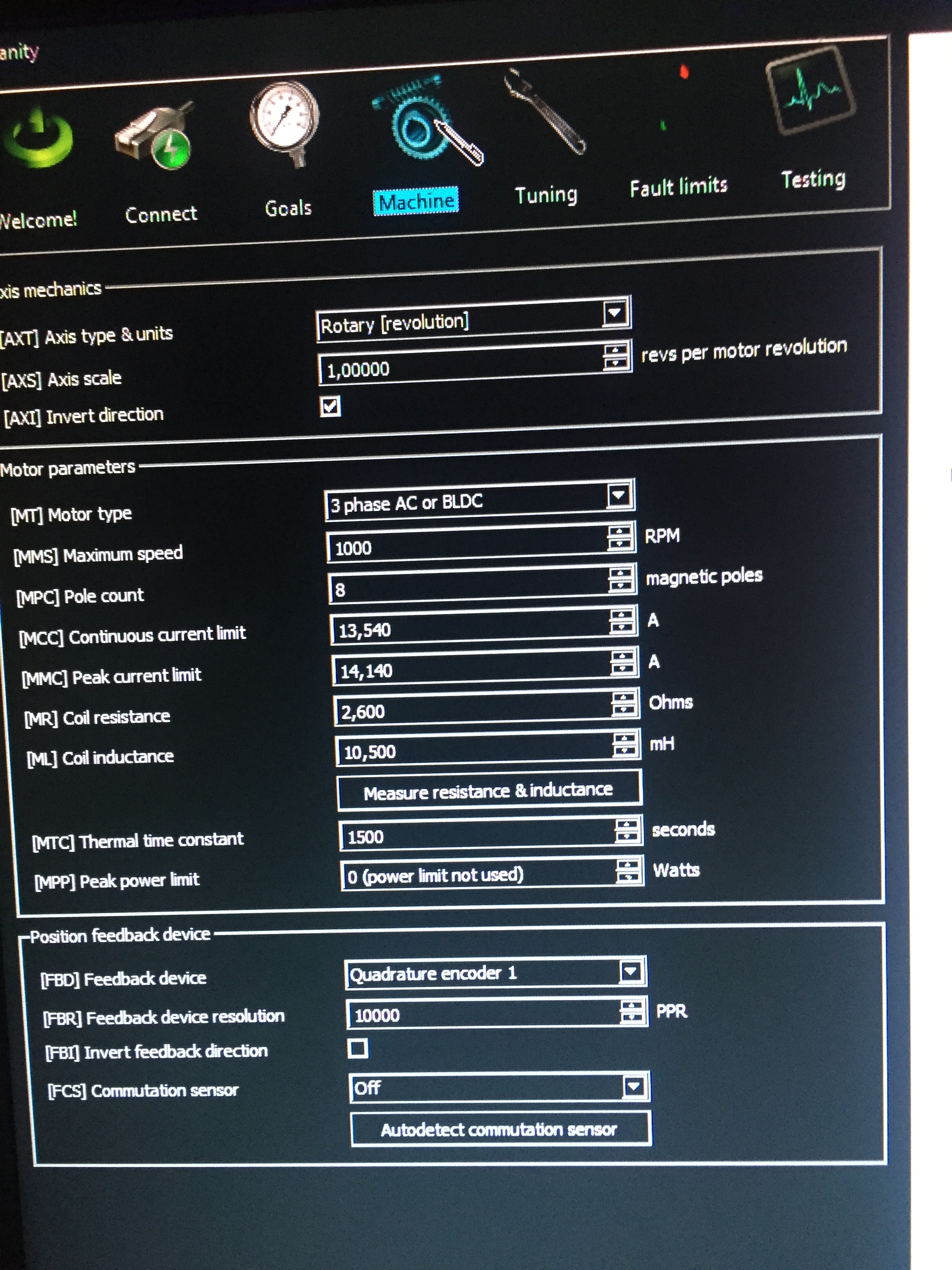
Perhaps as part of your testing, set MCC to 10A and MMC to 12.8A. I see you are overdriving the motor, so let’s first get to some known working state.
And change FOC to max as Mika indicates.
Cheers,
Beano
thanks tomorrow I try and let you know
Nothing the problem persists
you can use 2.2 for the small mige for constant torque value but it doesn’t matter and is not part of your problem.
I would try the standard drc file for the small mige first: https://granitedevices.com/wiki/List_of_motors_for_SimuCUBE
choose your file according to your encoder type.
its a safety file, so not full power after loading these settings.
and what should I do? with the text I downloaded from the link?
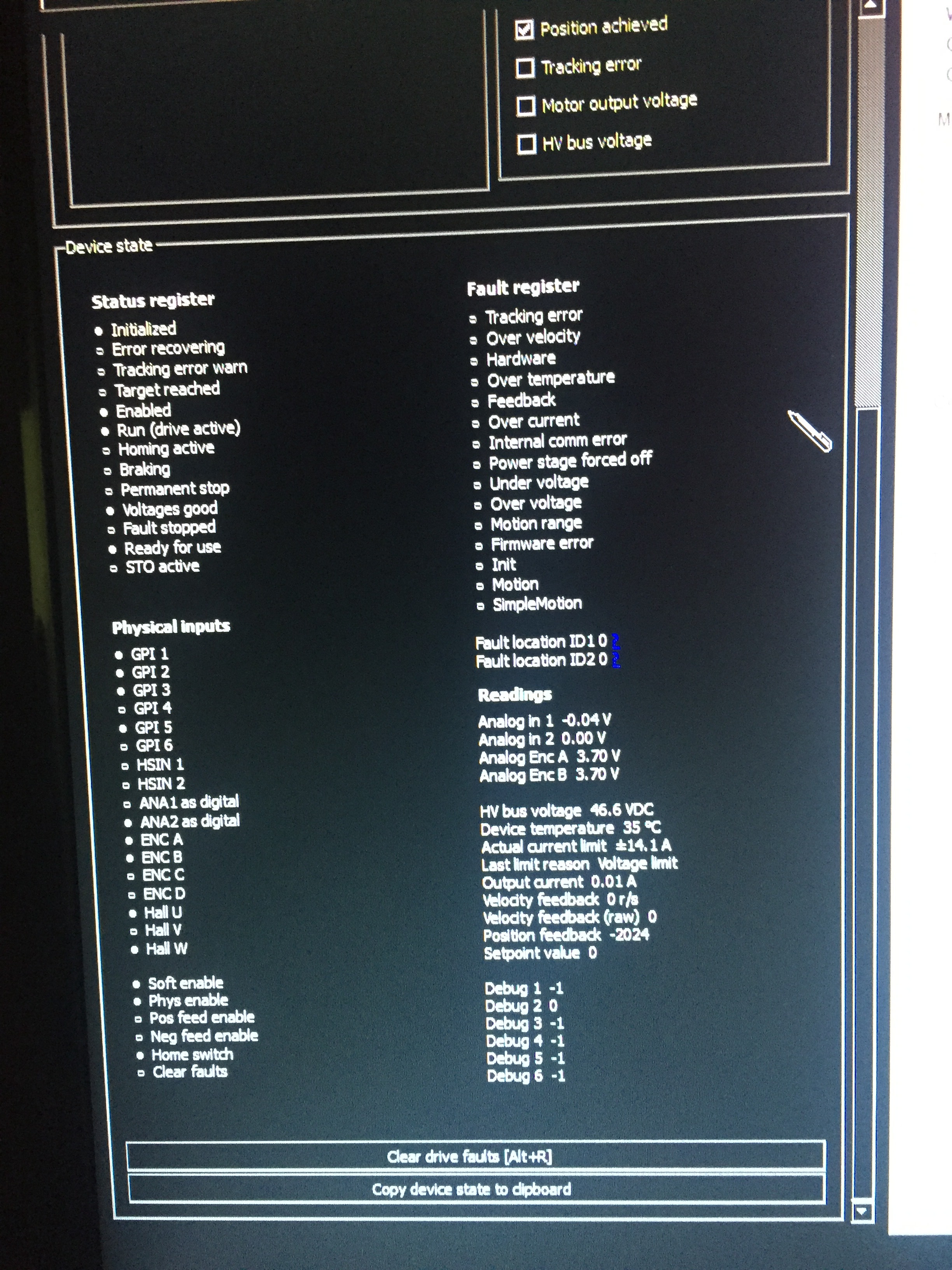
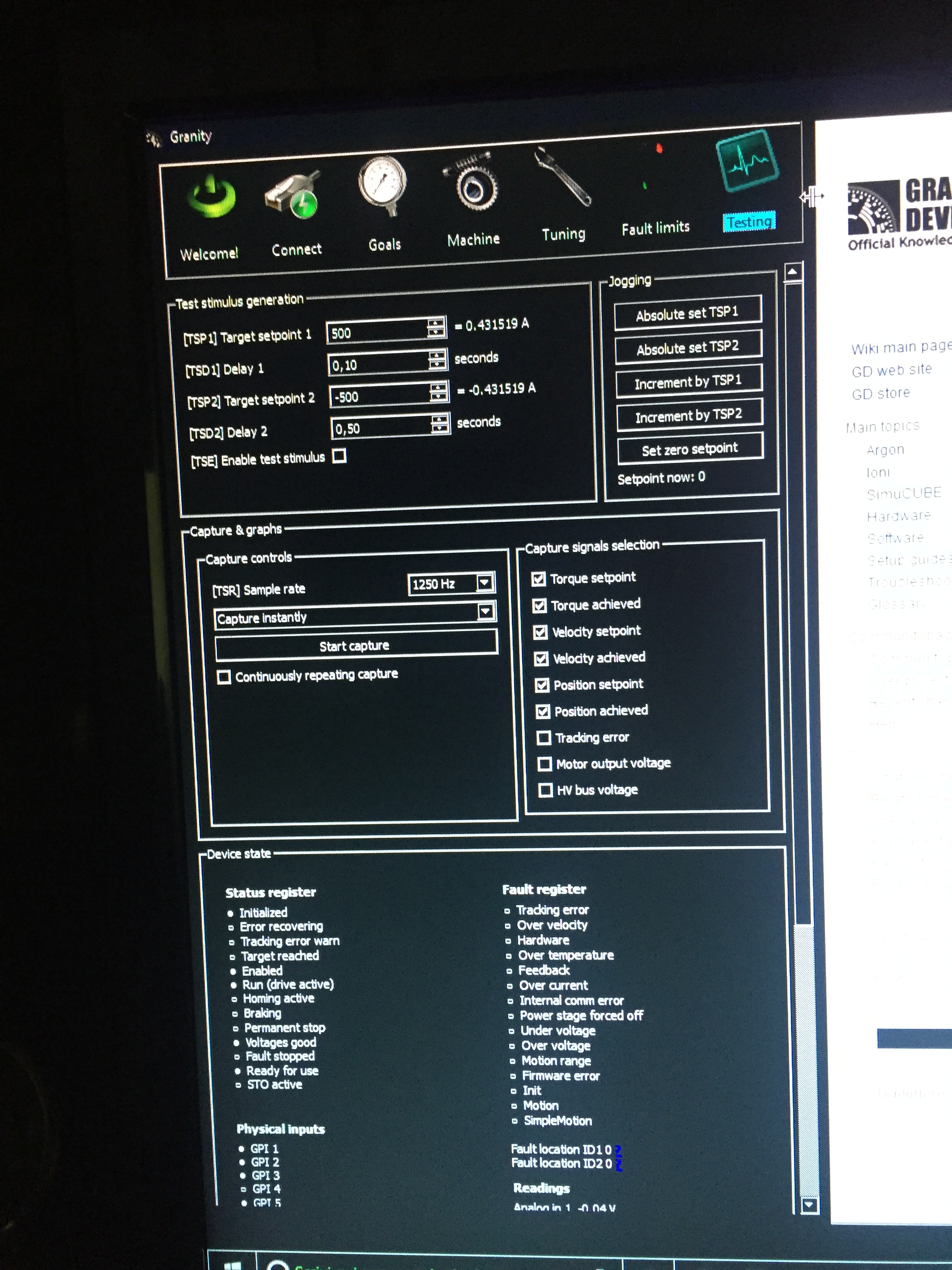
Your HV bus voltage is also a bit low, so please lower the Under Voltage Fault (FUV) to 35 V.
Does your feel also fault if you just wiggle the wheel while you have connected via Granity?
now dont work not move wheel when i turn on the power
My Watsup number is 0039 3892997169
Yes when i connect via granity the wheel is as if it was curb
Mika i cant sent message becouse i’m new user My Watsup number is 0039 3892997169
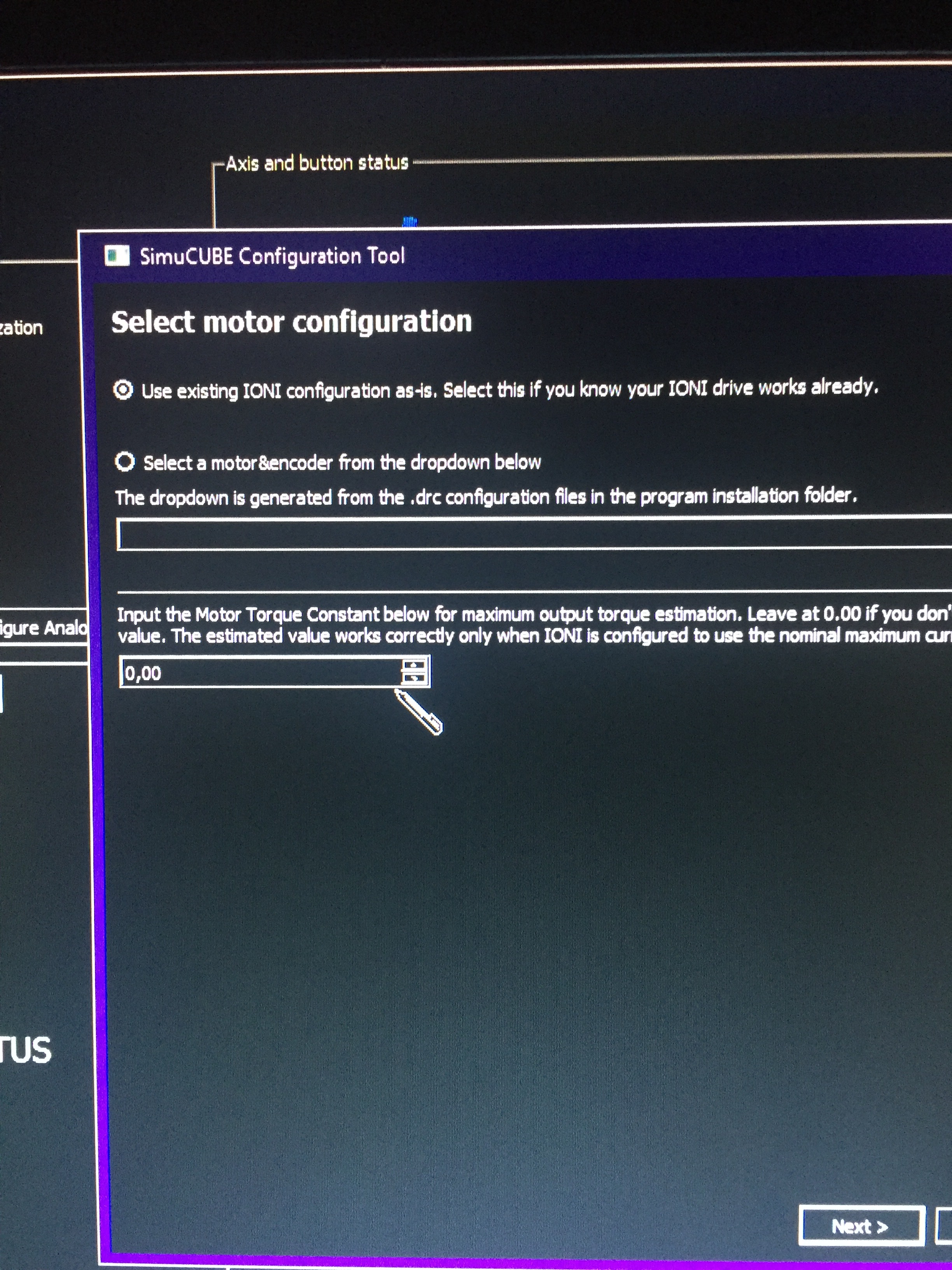
Salvatore it’s not a text, you have to right click the link and “Save as”. its a drc file, a configuration file for Granity.
You have to put the file into the folder where your Simucube configuration tool is located. Than you start the “configure motor, encoder and center point” wizard in the configuration tool and when it asks if you would like to use an existing IONI configuration or if you want to select a motor and encoder from the dropdown, you choose the dropdown and choose the drc file.
We are in a FB messenger call to try to find the cause for his fault. Now the wheel inits. Also his settings do seem to be quite correct.
Whatever the problem with any servo system, my first try is always to use another USB input directly on the mainboard.
I believe what you are experiencing is a combination of things one being a known issue regarding the strength slider and loading properly with profiles…
I think what is probably occurring is that it is ignoring the strength setting and using 100% power then of course with no filtering either on the output or the input (reconstruction filter) the forces are VERY VERY harsh… which would explain why it was so bad… Even the fact that there is no Reconstruction filter in the default profile makes the FFB feel really hard and abrupt even without a power increase but it is worse with it…
@Ippal - Might be a suggestion for Mika on that… I would support it to have a default Reconstruction filter… the only issue is it would’t be as obvious that you were running the wrong profile right away when it is set at the Read Only…
On Assetto Corsa, when you go back to the box often the steering wheel loses the connection and I have to restart the simucube. Today I did even go to the boxes with the esc key. Do I have to try to change usb?
Small note that seems odd…
Manual Indexing updating to 084 w/sinCOS 5000line -
After updating the center point drifted by about 5degrees no other changes, Re-Ran the Motor Config wizard everything is fine… Just not sure why the drift happened as i would think that it should have held the offset value.
Is it possible that you turned the wheel just enough so that the Encoder value would have changed more than 32768 counts while the update was happening?