Opps I will fix that… actually now with the new firmware i tend to suggest a MCC = to that of your servos Constant torque rating which is around I think 7 for the small mine and 10 for the large… I have those actual numbers somewhere… the reasoning though is that this will basically avoid the MMC/MCC spread initialization failures that occur at times.
I will go fix that… Probably there and in the SimuCUBE thread there as well since most was a copy over.
Yes, you’re right, I put 20A to do a test, the result was a lower saturation, less roughness in the MOTOR’s reactions, that’s why I wrote: that was my personal opinion.
I think, that 25A will never be used, you would break your arms, and of course, I mean MMC = peak current limit, in granity.
I only ask with the intention of learning, all information is welcome and very grateful
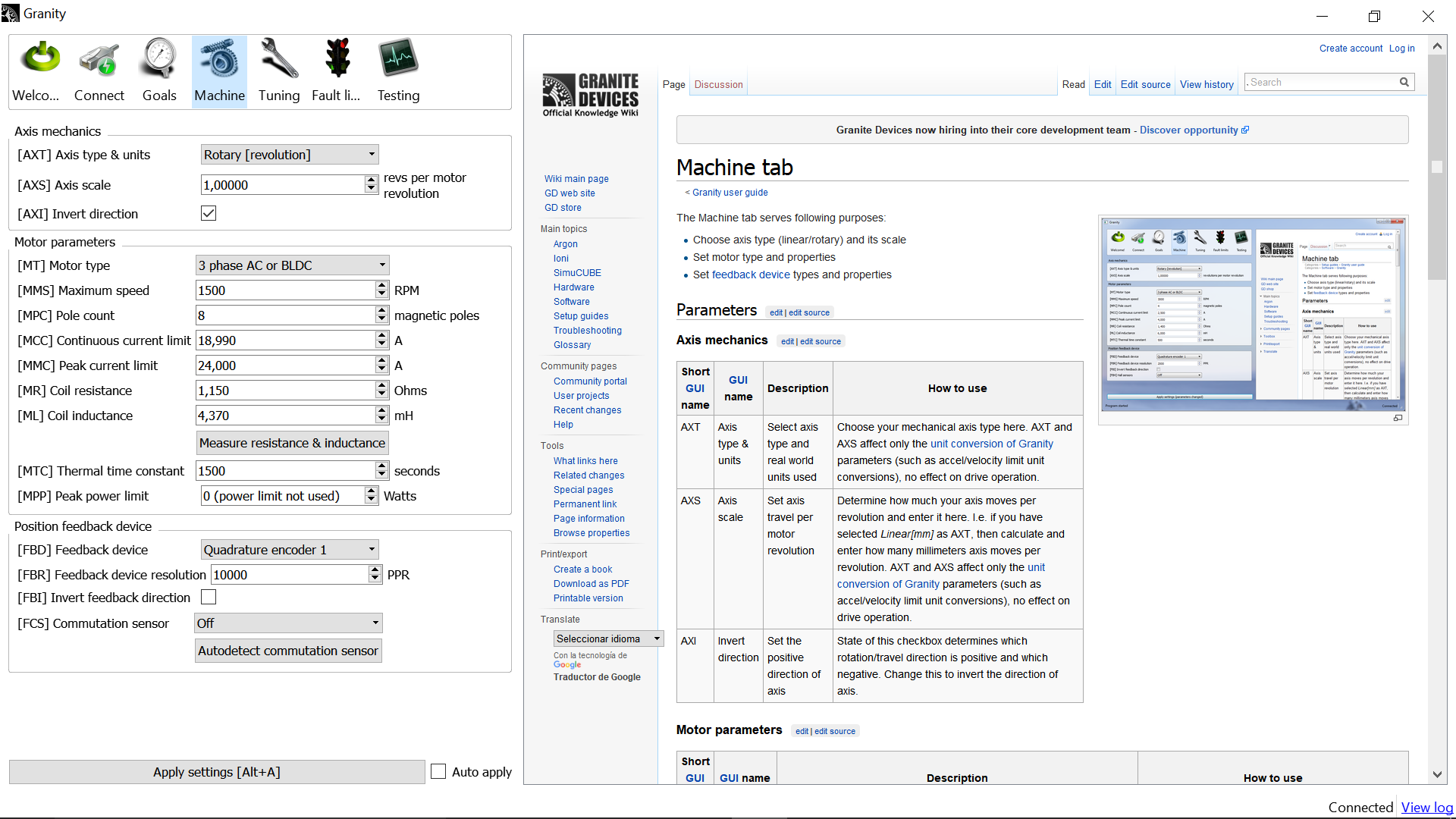
I have confused the parameter, I read this:
-MCC - Continuous Current Limit: (parameter = USER_DEFINED) -
This Parameter sets the continuous current that your servo can handle. Generally speaking the use of the OSW does not always have a continuous current as it is always changing. Due to the manner in which the IONI runs through initialization it is good to set this number at least 1 - 2 A below that of the MMC value … You could also set it to your servos manufacturer documentation for continuous use of your servo by multiplying their RMS value by 1.4142 and using that number.
But I was referring to MMC, thanks for the clarification.
It actually depends on how you use it… I actually Use it but I don’t use it constantly only when it is called for in iRacing… I generally run a .597 (or something like that) Specific output in iRacing but I do let the servo run out to it’s full capability when it is called upon…
With the New firmware it is generally acceptable and recommended to set the Full MMC that your servo can use in Granity and then use the strength slider to adjust. This DOES differ from MMOS where it was not recommended to do this and the reason is that MMOS used signal scaling on the strength slider where the New SimuCUBE Firmware uses MMC changes directly so it is doing effectively the same thing you are doing when you go into Granity… So if you set MMC to 25A and then set the slider to 80% you will be at the exact level that you were at when you put 20A in Granity.
This also allows you at anytime to change the Maximum power when you want with ease.
Generally speaking when you raise the MMC you will also use additional filtering to calm the servo a bit. So while you found it to be rougher and harsher, Filtering is used to bring those amplifications into check… Which also means that everything across the board is being amplified so at higher power you are able to feel smaller details more readily as well.
Ahh, that’s why I noticed an improvement in certain aspects, but worsened others, the little detail I stopped feeling it.
A while ago I made the change based on your specifications and tried AUTOMOBILISTA and I felt the small details again, thank you very much for the help received.
It can happen but after initialization it doesn’t matter if the MMC goes below MCC… However, for that reason I also suggest setting MCC at the Servos constant torque value which is somewhere around 8 fro the Small Mige and 10 for the Large.
Yea the different games are going to be considerably different in how the handle things… With iRacing it is completely Car Model Telemetry and Road Telemetry based… they don’t tend to boost anything in the feedback beyond what is given through the modeling. Some other games do enhance certain details in their feedback (which is why Mika is working on the Direct Input filters now.
Setting up SimuCube FFB in RaceRoom is a bit tricky. It seems there is a strong center-spring effect when starting with the default game-FFB settings. I eventually tracked down some recommended custom RCS file settings to use with the OSW and that works decent but, none of the additional effects seem to work (Slip / Engine Vibes / Shift effect).
Without editing the custom-controlset RCS file, the curb effects and impacts are extremely strong and raised curbs may pull in the wrong direction sometimes. I know that Sector3 worked directly with SimXperience to solve some issues when using the AccuForce with RR.
It’s also worth noting that the tracks in RR tend to be devoid of the fine details that we may be used to in other titles. That caused me to think the FFB wasn’t working at all, too.
I’m not crazy about how RR-FFB works but, the lack of surface details leaves me wanting to add some engine-vibes to fill the dead-space. RR-FFB seems to be one of the most challenging to setup to get good results - especially with DD-systems.
If you can make sense of it and have it work well with SimuCube, the rest of the titles should be easy-peasy.
I know that the estimated max torque is not correct, but I noticed something odd tonight.
Before v8.12 (and possibly v8.11) at 100% Overall Strength on my profiles actual max current was 12.86A and estimated max torque was 26.xx Nm. (Small Mige)
Since v8.12, without altering the profiles, the estimated max torque has been showing as 18.xx Nm. No worries I thought, as estimated max torque is not correct and has not yet been sorted.
Tonight, when I moved the Overall Strength slider away from and then back to 100% and saved the change, the estimated max torque was showing 26.xx Nm again. But then, when I loaded a different profile and then went back to the previous profile again, the estimated max torque had reverted to 18.xx Nm. I tested on other profiles, and the same happened.
Don’t know if this means anything, but thought I would just report.