Nice to here can You share picture how is looking ? Regards Grzegorz
Sebastian Can You sow also yours setting from 0.83tools ?
Initial tests to try to reproduce the numb feeling, while getting debug data that would trigger it, didn’t produce a good result. Even the same settings I had on Friday didn’t make it happen.
Does someone have consistent settings for iRacing and Reconstruction filter, that makes it happen?
In another news, oddities and inconsistent profile settings applyings have been found and hopefully fixed.
2 Likes
Thank You Sebastian 
I’m having the problem that sometimes out of nowhere the motor enters a fault state in FFB games (e.g. AC).
I’m relatively sure that it’s not my servo settings because it doesn’t happen in extreme situations (high torque) but rather during normal driving with maybe 5-10 Nm effective torque.
Unfortunately, I can’t tell which fault it is, because when I click on the Enable Ioni USB config button to look it up with Granity, the fault is cleared already and Granity just sees a clean drive.
I suspect it is FOV, but I have no idea where that would come from.
Servo is the 230V Lenze, driven by IONI Pro HC at 17A cont and 23A peak, which is well within the limits.
supply voltage is 48V and FUV and FOV are 20V and 58V (already increased from 55V originally), respectively.
I’ve used similar settings with MMos and only once had FOV, but when using a higher peak current and under heavy load, which is why I lowered MMC.
With the new firmware, I’m seeing faults in different, non-extreme situations.
Ideas? is it a bug in the FW or how it uses the drive?
Edit: what did you guys set for FFT “Goal faults filter time”?
I had it at 0.3s, possibly the default. could that be the cause?
I noticed that when moving the wheel in Granity, the bus voltage is close to FOV most of the time.
I will try to adjust the firmware to clear only SimpleMotion faults when going to Granity. It should now be possible to do that…
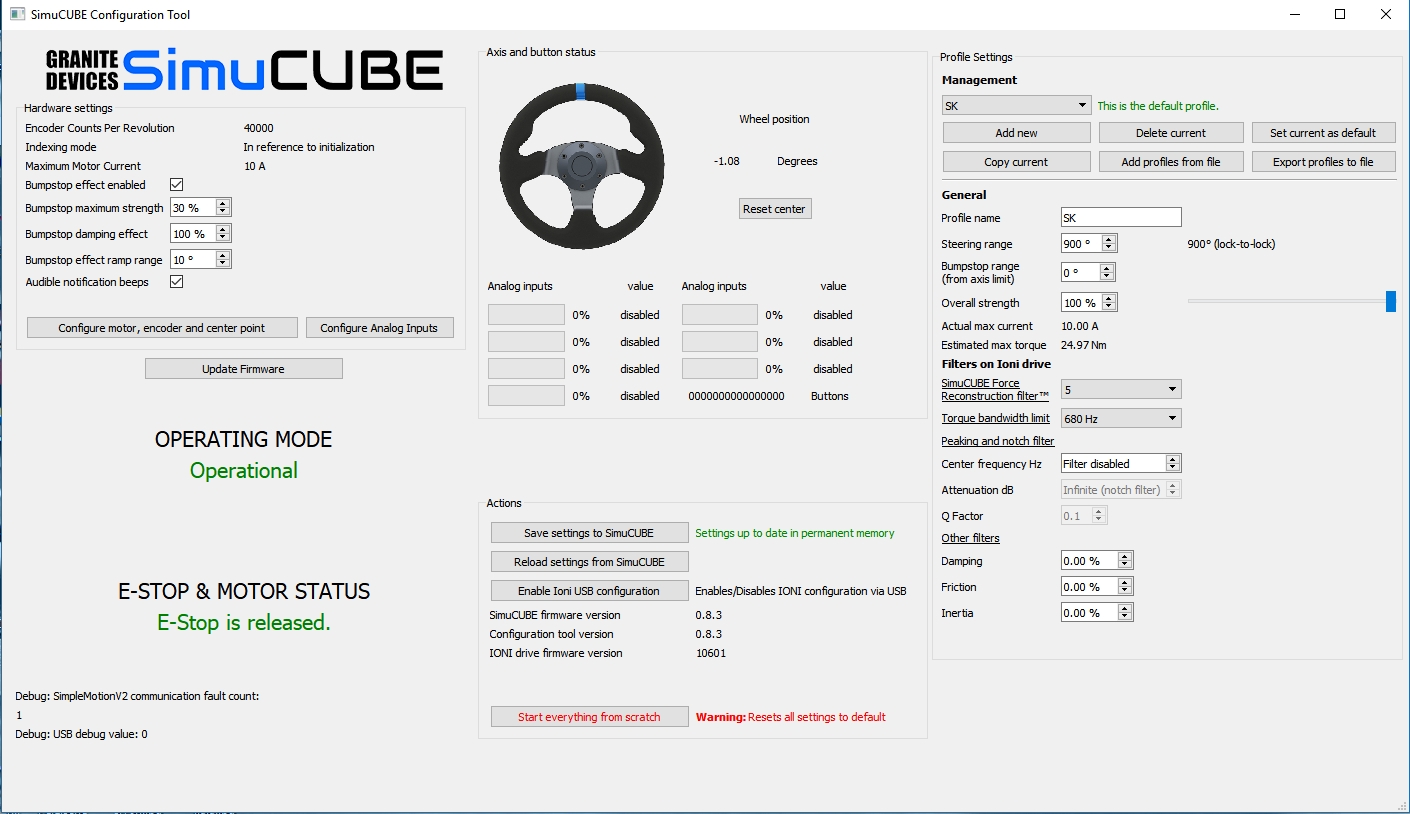
Mika, the baseline settings I shared with you earlier, that was profile default, induced that fade-error in mine in 0.8x prior to 0.83.
Recon Filt = 5
Damp = 6%
Frict/Inertia = 1.5%
Power level set to 100% in GUI and slider to 30NM in iRacing on the AKM53K. I could produce the error at will then when hitting high-speed corners around Laguna Seca, Rd Atlanta and Philip Island.
Cheers,
Beano
Maybe this info might help
I never have had those numb feelings. and i tried different rcon’s and never had it.
On the contrary i don’t use any damper driction / inertia at all.
Maybe that has something to do with it. (just a tought)
I can comfirm the numb feeling at high torque levels still exists with 0.8.3.
I drove my Lenze at 25A, 100%, Ferrari 488 GTE @ 26nm, Laguna Seca.
Recon at 2 and 5, damping 1, Friction 1, Inertia 0.5. It felt like clipping, no detail in FFB with Recon 2 and 5. Also, before the numb feeling, the FFB details are weak, like effects scaling is wrong. @26nm it doesn‘t feel much different as @40nm, more steering resistance but same level of bumps and curbs.
Flashed back to 0.7.1, much better details at high torque. effects scaling much better and plausible.
edit: back on 0.8.3 everything feels fine now. Its inconsistent.
While torturing my poor Lenze it got so hot I couldn‘t touch it anymore.
Maybe that introduced a new issue I never had with my Argon. The Lenze slipped through - exactly like the clamping set was slipping, did even sound like it, but the center setpoint was always right, it never changed! Anyone ever experienced something similar?
Another question, what is the Q value in the peaking and notch filter? Quality? How does it affect the Filter? If I set it to Q2.1 I have no oscillations whatsoever in iRacing, NONE, low torque, very high torque, no oscillations.
Q is the width of the dip in frequency, the smaller the Number the wider the range of frequencies that are affected around the notch frequency so .1 affects more frequencies to either side of the number set than 1 would.
Its been a very busy week with my other works. Today we had some hardware testing tasks, added some data to the UI from SimuCUBE, and also made releasing comms to IONI USB (Granity) to clear only SimpleMotion faults and not the others.
1 Like
Yes, we think there is something inconsistant and funny happening somewhere too. We are trying to formulate a good plan to find the part of the code that does it.
Could I put a feature request in could we assign some inputs to raise and lower the Overall Strength Slider so in game we can turn it up and down easy.
Cheers
Troy
inputs such as a particular button press?
Yep I was thinking a tick box to assign either simucube buttons or other joystick buttons ( I’m not fussed which ) to Raise and Lower the Overall Strength.
Other Joystick buttons (not on SimuCUBE) is unlikely in the short term, as would need to implement Directinput api interface to the configuration tool just for that.
1 Like
i like the idea of just the simucube inputs i could make just a wheel control box.
Or keyboard inputs for those of us who don’t have button boxes. If possible