And open on Wednesday, jeah!!!
AWESOME!
You may now have a short nap.  LOL
LOL
1 Like
Instead of nap, I’ve started on the revisions to the user guide.
LOLS.
Good work, Mika, thank you again!
Mika in the “read only safe profile” it might be a good idea to have the appropriate settings for the small mige as default.
I am pretty sure that simucube and small mige is still the most abundant combo out in the wild.
Great work Mika!
I agree with Joe that SimuCube + Small mige combination is the most popular out there.
So do you think we will be able to see an open beta this week?
Cheers
Profiles do not know about servo settings. Mainly the read only profile is something to fall back that has 900 degrees of rotation, and max forces at 20%.
Closed beta will be ready for sure; for open beta, we will need to transfer our user guide to our own wiki site, and then put the files somewhere safe for distribution. Then there is also Simexpo, where I will be travelling on Friday.
Perhaps I should have links for the then-current closed beta to give interested people at the expo? 

And for us unfortunate users who can’t make it to expo? 
Can’t help you in that, the fully open beta will require the round of bugfixing and the user guide to our wiki and zip file hosted in some sensible place. There is just no way around it…
Ok I Respect that.
The firmware user guide has been transferred to our own wiki. For now, it was just a straight transfer of the google drive document to LibreOffice and from there, export to mediawiki format.
We will improve it in the future.
I didn’t get to the office today. I will get there tomorrow, there are only two things I need to test and verify. Likely, the closed beta will be released at the end of that session.
2 Likes
Cheers Mika! Appreciate the heads-up
Thats great news heard about this from my OSW kit supplier few weeks ago he said it feels allot better. looking forward to the new update release
is the wiki info up and do you have a link to it ? I looked on wiki site and got bit lost
Thanks
Simon
Hello guys, I’m following the thread and hope to get in touch with the new firmware soon.
As I understand from the “firmware user guide” on the wiki, until the “maximum motor current” setting is implemented we will still need to use the MMC value in the granity software to adjust the max power of the motor (because the “overall strenght” setting introduces some drawbacks on FFB, something like the mmos “max force” setting). Is it correct?
edit: Hi Simon, here is the link: https://granitedevices.com/wiki/SimuCUBE_Firmware_User_Guide
1 Like
Yes, if you want to change the MMC, Granity is still needed currently.
There should be only a very slight drawback in just using the percentage slider. Internally, everything is calculated with floating point, but the force level that gets send to the servo is defined by the range of -16384 - +16384 if I remember correctly. So the only drawback would be the lost fidelity in this value. If using for example 10% power, there is only 1638 different levels of torque used. Would a driver be able to differentiate all of them?
Thanks for the technical answer!
I do not know… but the simracer brain will suffer by knowing it is not using hardware at full potential and performance will go down 
2 Likes
 Simracers are a peculiar breed indeed.
Simracers are a peculiar breed indeed.
Most likely the setup for the MMC will be the following:
- Motor config wizard will read a fixed MMC value after drive has been configured
- As this varies between servos, and the UI would be a slight mess to do, there will be probably a slider (and text field) to set this up with 0-100 percentage of the value read at step 1, with also an indicator of the actual MMC being applied.
We are also considering adding a graph/plot that tells input Nm vs. output Nm, at least for most popular servos. The problem with this is that the torque constant that is required for this calculation/plotting is not saved anywhere in Ioni either, so thats why we haven’t done that yet…
Also, by having this separately in profile, the drive will initialize always with MMC that has been proven, and setting new MMC value via simplemotion does not require drive restart.
If I understand well, I think the plot will be really helpfull especially for newcomers.
Last year, after buying my osw, I made an excel tool (setted for small mige) to see the effect of changes and it was usefull.
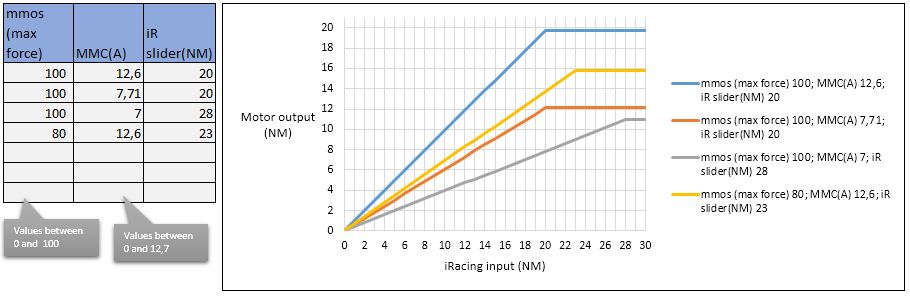
anyway the slider 0-100 percentage with the indicator of the actual MMC applied is exactly what I was hoping for.