Not so good news from my side with the Lenze Servo.
The grinding, the reason I brought up the whole grinding/noise reduction issue with ioni, is still there and I don’t think it is supposed to sound like that under no load!?
Its a pitty because I offered to test the firmware in advance
I’m sorry if I’ve missed your request to test this noise improvement firmware, but we did get a Lenze user to test too. We don’t have first-hand experience with Lenzes, so difficult to say if that is normal or not.
Sounds like [ML] and/or [MR] values are too high. Can you try if it changes if you re-run Granity’s “measure motor resistance and inductance” function? If it gives the same MR/ML values, then just try reducing those values 50% manually and see if it helps.
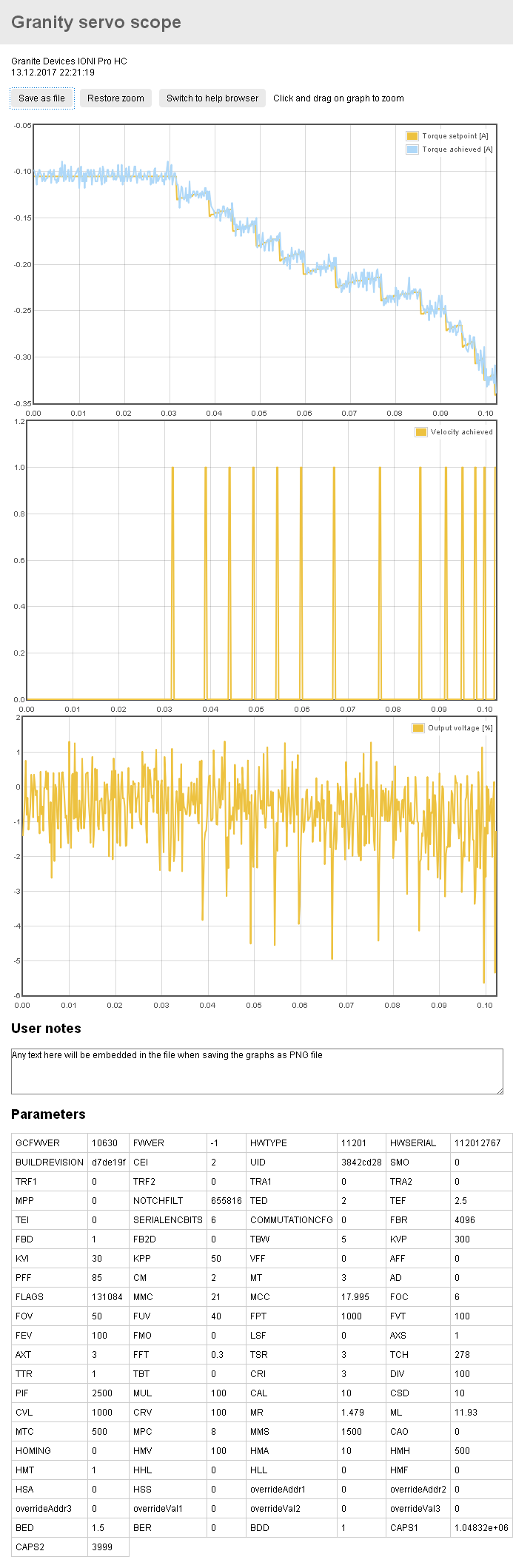
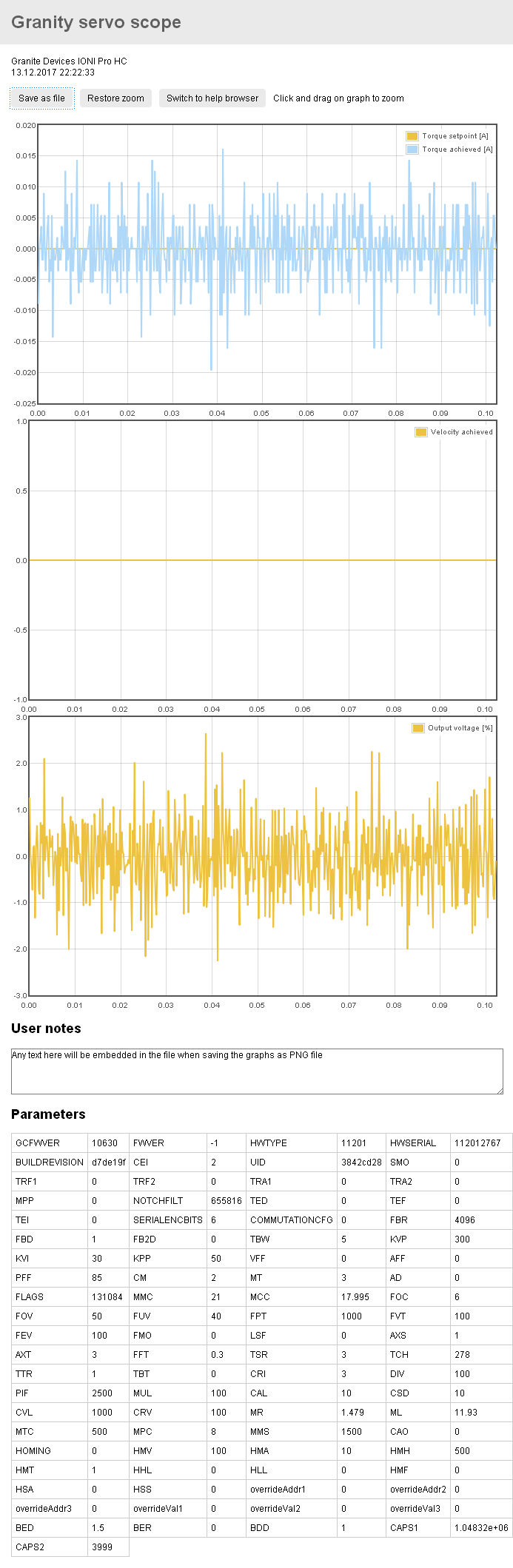
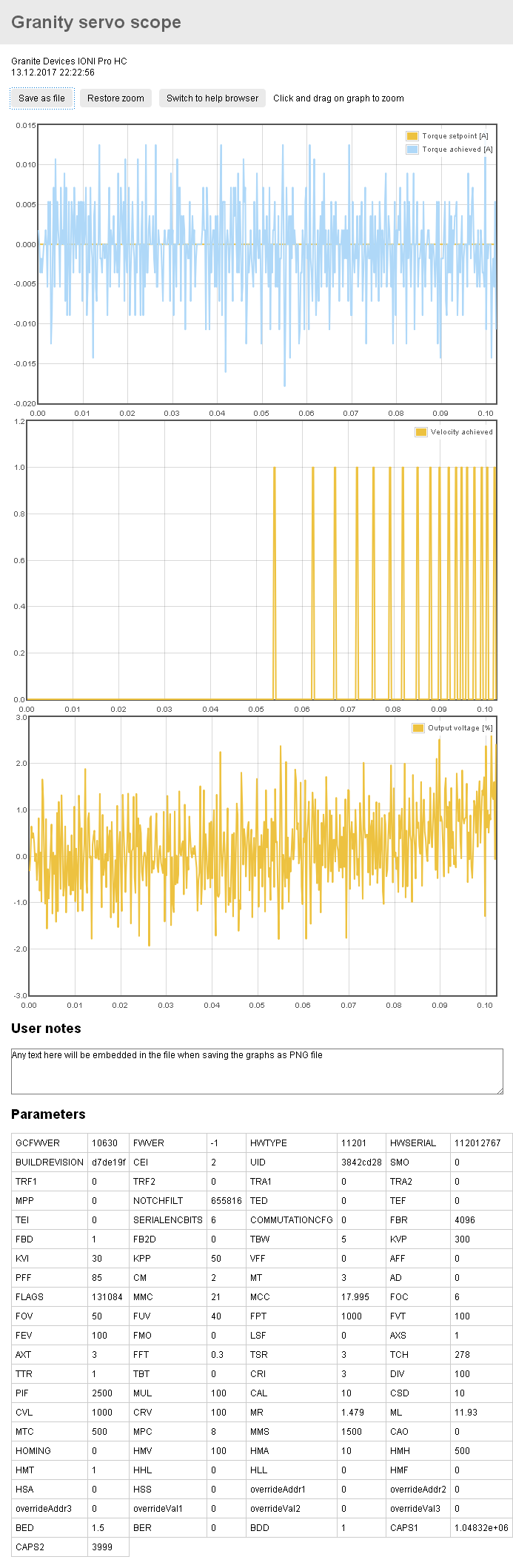
Thanks for tests! Looks like it’s not then caused by ML/MR. Here is another way to analyze the case: make Granity captures while turning the motor so that it makes sound. These settings should work:
It might take few shots to time the capture properly while turning the wheel. Could you take few captures and post saved graphs for inspection? We expect to see production of the noise from these graphs.
BTW, is the inertia effect the biggest affector here? If you adjust it alone, does the noise volume adjust equally?
Just upgraded the Ioni firmware to my small Mige… I can now run unlimited TBW, before I could only go up to 680 before inductance grinding noises started. The wheel just feels smoother,as a direct result I have reduced the reconstruction filter from 5 to 3 and have upped the ffb 10-20% ( from my own preference ). I hammered round road america for an hour in the Porsche in iRacing, played with the settings and did not have any glitches.
I had considered getting a uprated encoder… not any more, can’t see the point after this update.
What can I say other than a big “thank you” to Mika and Tero… they keep making the OSW better and better.
I’m not sure if it’s because I put my computer to sleep and wake it up.
Basically simucube conf tool will say the wheel is disconnected. It’s still plugged in and there’s light in the simucube box.
I’ve gotta turn off the simucube then turn it back on.
I can connect via granity, can’t remember if I always can.
Sounds like the same issue that has been reported previously - rebooting pc makes SimuCUBE disappear. It is an issue in the ST Microelectronics USB stack, and as it is not our code, it is difficult to debug.
It is on the list of things to do, but not very high.
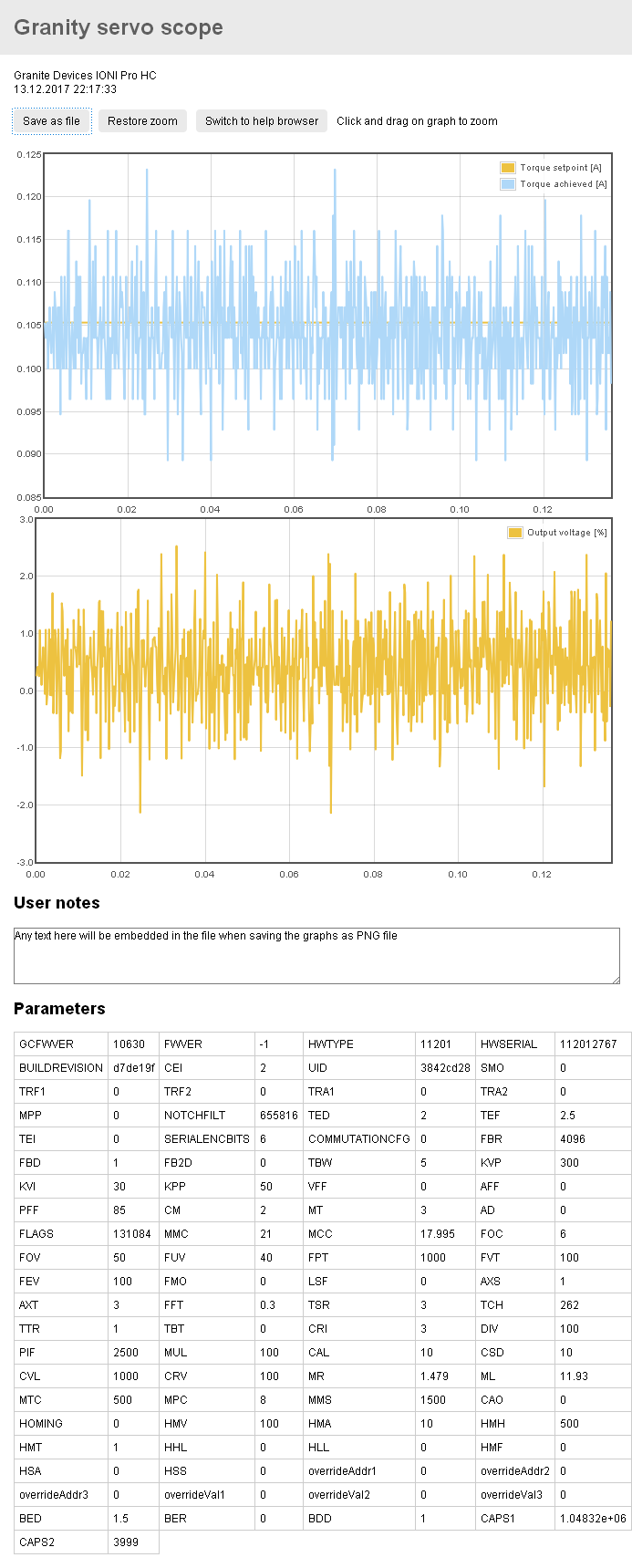
Thanks! It seems that achieved torque gets some ripple while torque setpoint looks much like expected. Perhaps this motor type requires manually tuned MR and ML values. Here are instructions: https://granitedevices.com/wiki/Tuning_torque_controller
The goal would be to reduce difference between achieved and target torque curves that probably is causing the oscillating noise.
With MiGE we have found automatic measurement work very well. I won’t suggest manual configuration, but of course it doesn’t hurt to try if you’re interested.
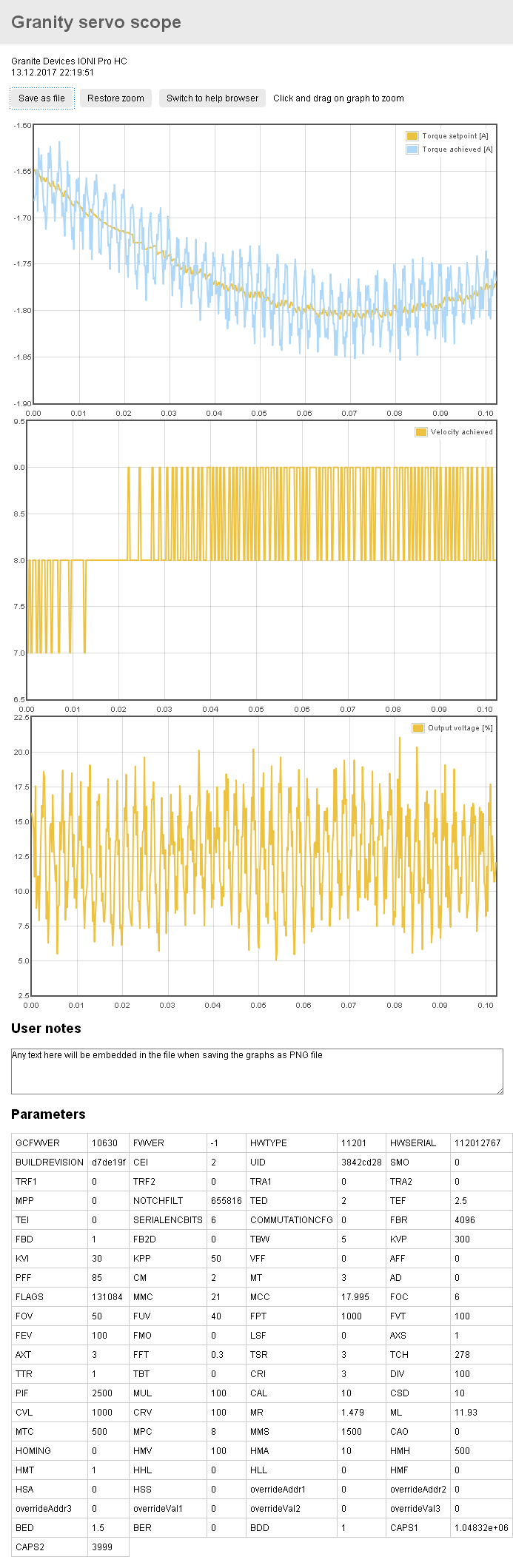
well I can’t block my motorshaft but I just tried with different MR ML values.
I found a pretty good fix! We assumed I have to decrease the MR ML values but instead I have to increase the coil resistance MR only.
It measures 1.4 and is noisy - if I set the value manually to 2.0 its much much better!
Are there any doubts on your side Mike and Terro? Is there a downside in increasing the MR value? Estimated Max Torque Value is way down in Simucube software.
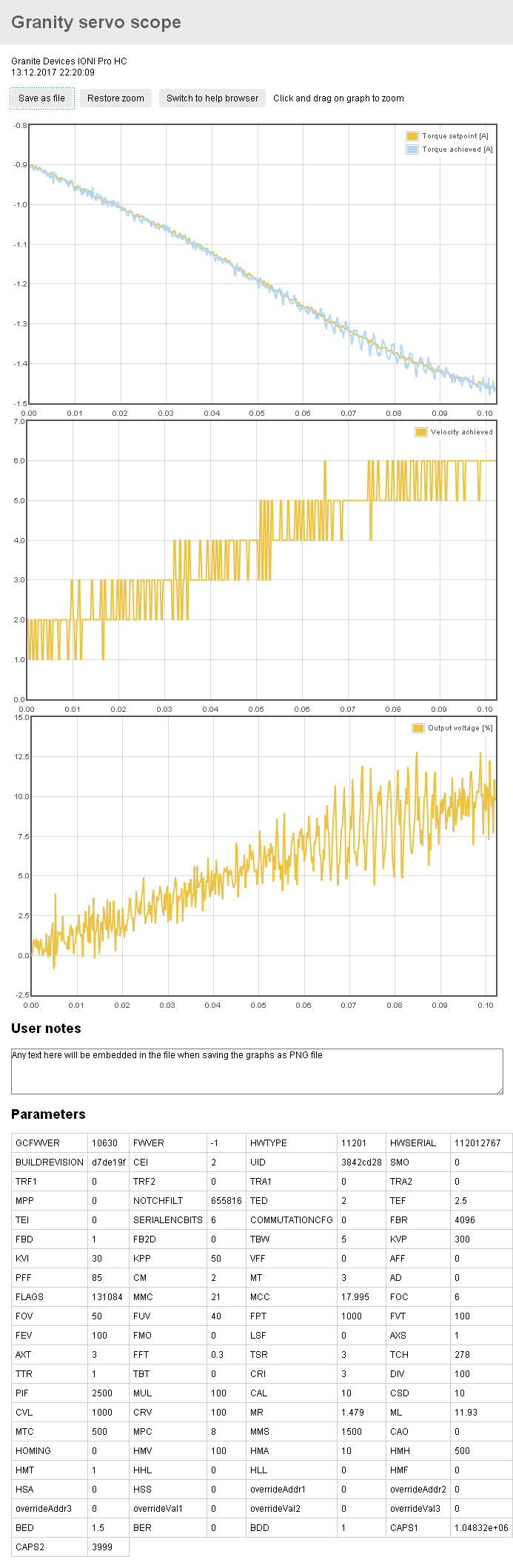
further testing revealed I can use 1.8 MR if I decrease ML. combined with TBW unlimited it feels good and even the grinding is much improved. I am getting there I think… I just don’t understand why it does look like other Lenze users don’t have these troubles (beano and jonpaul?).