Please try 0.6.3 which I released a few seconds ago. Only changes are to the filter value rounding.
Ok, other filters seems to be good now; Attenuation dB and Q Factor still buggy.
Thanks! I will fix them too for next version.
If I remember correctly the changes we make in the SimuCUBE firmware are not migrated to the IONI Flash and remain in the SimuCUBE memory this is why when you reconfigure the Servo using the IONI profile everything changes… Mika please correct me if I am wrong here.
Ioni filtering parameters are stored in simucube flash, not in ioni flash in the simucube firmware.
Stolber’s problem is understood now and it is a real bug that I now know how to fix.
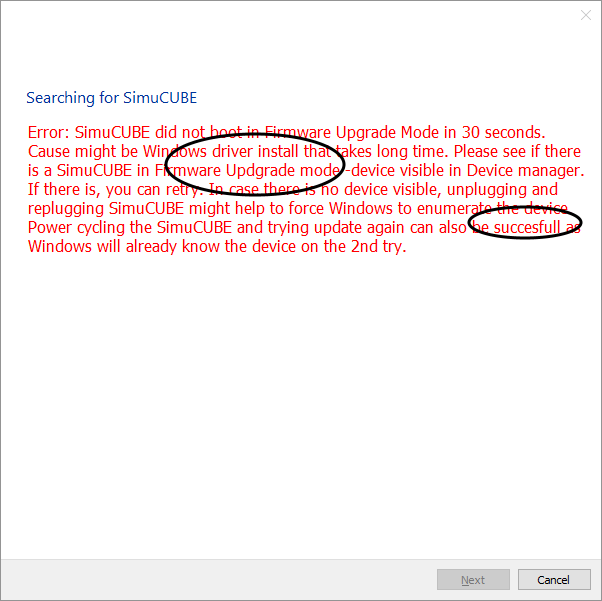
I made a poll about whether the Ioni firmware update hangs on people or not.
Please test and answer.
Just want to report in and say I have not experienced any issues whatsoever with the lastest FW. The only thing that I am finding a little weird is that ever since updating I cannot seem to feel the “rubber” of the tires anymore on filter 5. All my settings stayed the same but I don’t know if its me that’s used to the filter now or something else is going on. Relevant settings are posted below. I’m using Brion’s max power settings for my big MiGe.
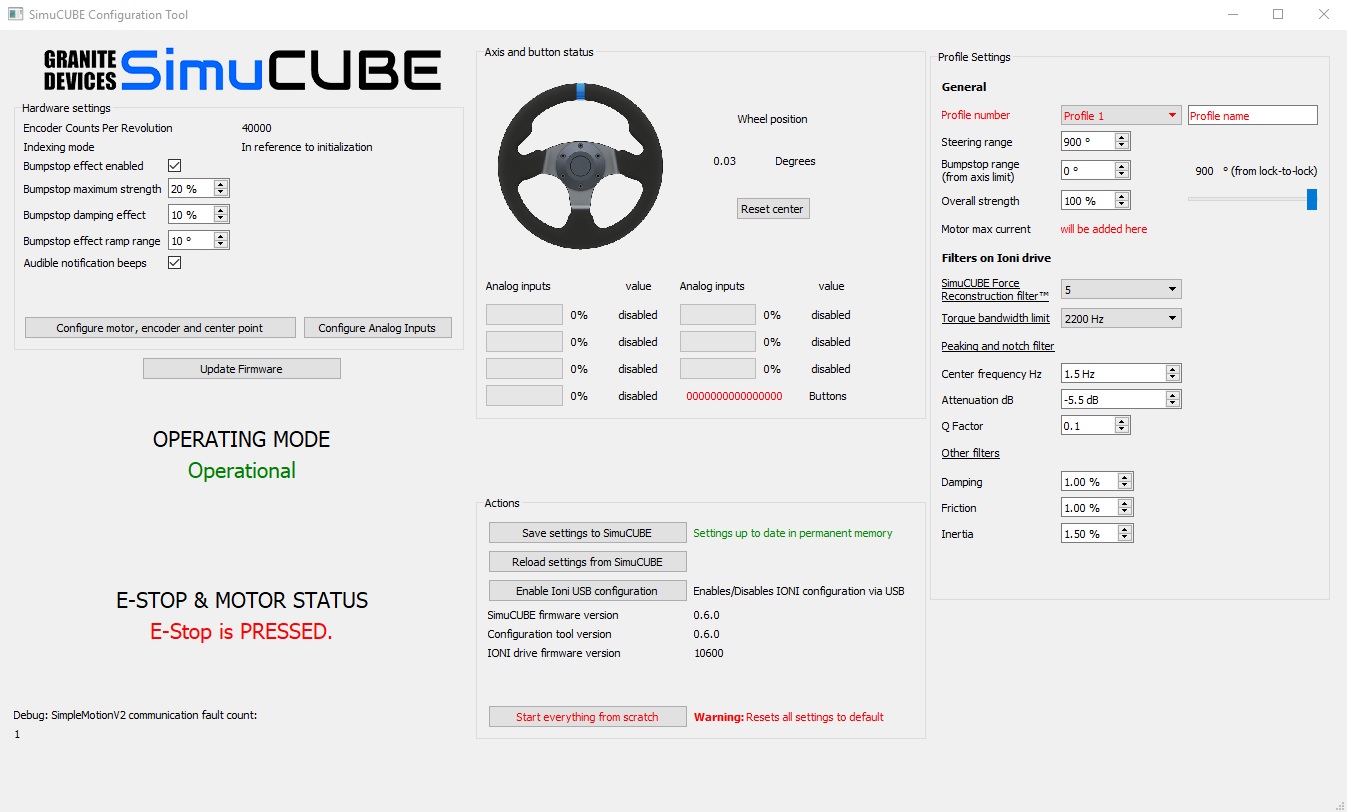
I can absolutely say that nothing in the reconstruction filter setting was changed between these releases. It must be some other setting you have.
Lowering the tbw will give a more rubbery feel.
@falcon2081
I think, it’s the Attenuation dB of -5.5 dB which numbs it down.
Either deactivate the Peak and Notch filter completely, or try it with Attenuation dB set to -1.5 dB.
The only thing that’s changed has been the TBW to 2200. I used to use 1500 but even at that setting it was the same. The feeling only changed after I updated but like I said I think it’s due to just me getting used to it.
@Stolber I need the peak and notch filter. I don’t like the feeling of the wheel as I’m turning it and return it to center. The response is slow. I will lower the Attenuation db and give that a shot.
Hello Mika,
I had this when I initially loaded 0.6.1b. Even though reconstruction filter was showing 5 the filtering action was not taking place or loading, I know the feeling when it is off and that is what I was feeling.
I had to go in and select 5 again from the dropdown list and next time out after doing this I could feel the filter applied as it normally would feel.
Working fine since then.
Just so you know… My newest settings when using the reconstruction filter are quite different…
TBW = Unlimited
Reconstruction = 5
Notch Center = 8.0Hz
Attn = -5.5db
Q = 0.1
Dampening = 6%
Friction = 0.5%
Inertia = 1%
I am still playing with settings quite a bit, with the reconstruction filter producing a cleaner input signal the telemetry based inertia and friction are coming through more clearly it appears so it is altering the effects of the filtering and allowing it to be applied more accurately to what the filters are supposed to do.
Reading your other post if you do not like the return feel to center in that it is too slow increase Inertia and/or decrease Friction. Increasing the TBW allows more information to be passed through to the wheel as well which increases feel.
Friction and inertia filters are impacted directly based on your settings, there is no external (game) telemetry impacting to these filters at this point in time, I doubt there ever will be.
Possibly for other effects if the community develops and API to feed such information to the SimuCUBE…
Cheers,
Beano
If the recon filter is running at 2500 (If I remember correctly ) would’ve the tbw be wasted set@at anything above that value? What I’m I missing if that’s not the case?
What I meant was the inherent friction (from ball joints, gears, ect…) and inertia (tire squirm, sidewall deflection, bounce, caster return rate, ect…) feeling effects from the steering transmitted in the cars telemetry… these are the things being rendered by the signal more accurately without as much noise giving us a much better feeling to the wheel and allowing us to adjust the feel further with the filters, Not that the game was imparting friction and inertia filtering to the wheel as we are applying them as filters.
The Recon Filter Hz is Frequency of update (read)… TBW is a low pass frequency filter so the higher the number the more high frequency signals get processed and not filtered out.
Oh and to bring this sort of back on topic…- I haven’t found any new bugs to report as of yet… Except maybe the accuracy of the Notch filter has gone down a bit as you can’t use x.xx numbers in the Hz only x.x… Maybe I’m just thinking it was this way before I can’t remember though.
1 Like
Thanks, spelling mistakes fixed for the next version.
The recon filter will update new force values at 2500 Hz rate to the wheel, in time domain. The resulting signal can be almost anything in frequency domain, although almost all of the very high frequency signals (that result from the 60Hz signal being jagged) are missing.