At last some more reasoning in here. Reading through this thread, at times, made me feel depressed.
Simucube1 still is such a fantastic piece of kit. I love the fact that there is access to Granity and the comprehensive wiki provides all the information to tweak the hell out of it, plus we get the wireless module still. That is commitment to customers in my book. Because, putting aside sales pitch and to be in line with (questionable) EU allowances on power consumption and efficiency figures, the wireless module is the one thing that really would have separated SC2 from SC1.
GD has seemingly evaluated the market, and decided that its worth bringing out a fully integrated, neatly packed solution in the form of Simucube 2, directly aimed at Fantecs Podium. Everything readily setup, no more need to tinker around. This is just great for simracing, but does not take away anything from Simucube 1, at all
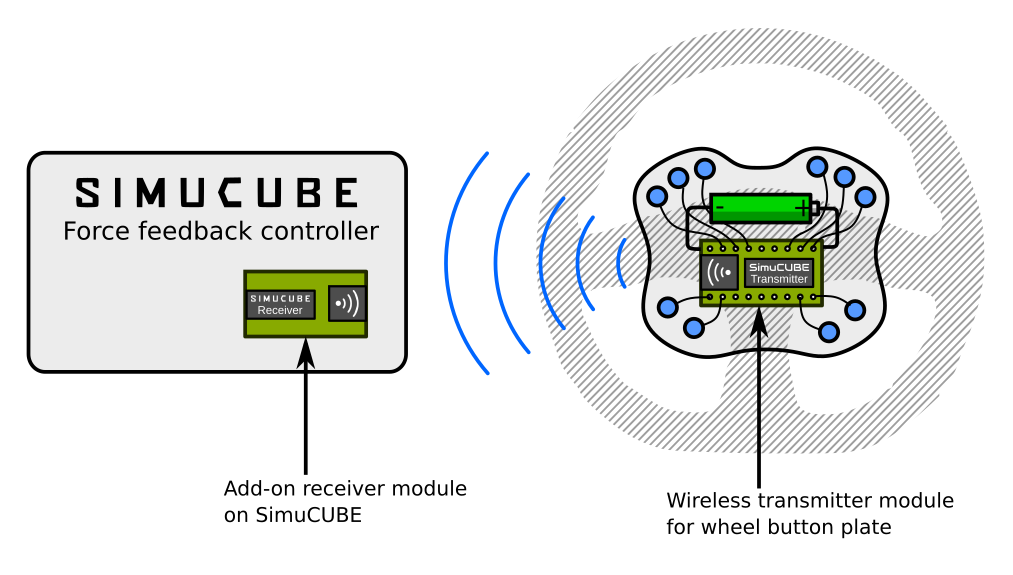
If creating a new button plate for a wheel from scratch, do you still need a circuit board like the Dsd micro 32 button circuit board plus the wireless board? Or can I just purchase this circuit board, and figure away to get a battery in there. Please see the link to the wireless controller and the pic below. https://racewerk.com/collections/simucube/products/simucube-wheel-side-wireless-button-plate-module
@Andre: The reason the MW psu-range was chosen for this new product portfolio from GD is due to their renowned /hard-earned reputation in the industrial automation sector.
Even so, Team Granite did a pretty comprehensive deep-dive into selecting the best match from that portfolio. As have been stated, that specific psu used on the Podium series featured early on in the selection process, but they were quickly discarded due to problems surfacing very early on in the testing phase, often becoming rather noisy after just 30-60 minutes of testing.
Put it this way: I have tortured a range of MW psu’s over the last 5 years working with DD wheels, consistently more so than anyone else, or any other dd wheel supplier out there, and I have yet to see one fail.
Even on my current Bogeyman monster setup, I am running the wheel at close to max torque, Ioni is set to 25A POS, and psu is an SDR-480, no issues with it over the past year. These MW’s are super-reliable in this application, if they survive torture-testing in my hands, they will survive anywhere, tbh.
That the first thing that came to my mind when I read on that accident, is that why GD discarded them.
How that MW 280W PSU stack against SDR-480, just as reliable, I hope?
The 280W /dual-280W has been selected for the Sport and Pro series, to provide a good overhead capacity - the reason why the wattage seems low, has to be attributed to the very good efficiency of the servo-design used in the SC2.
They are significantly more efficient than anything we used in SC1 thus far, whilst being smoother too. I tortured the Sport servo at as high as 25NM at GD premises about a year ago, the servo did not complain much…nor did the supporting circuitry.
One thing that is not often said, but hinted at by other players out there, is about stall-torque vs peak-torque, servo response and a few other parameters…but it is only hinted at, not truly explained, probably just to confuse end-users…perhaps one day I will do a bit of a write-up to explain why these specific servos were used, including things like inertia, efficiencies, high-res encoder, response and torque-characteristics…
Might make for interesting reading.
But rest assured, neither psu, nor servo, will go up in smoke if tortured at the limit of it’s design-specifications
That would be great because there are a lot of new terms being thrown around lately. Im sure im not the only one that would like a real explanation without the marketing thrown in.
"One thing that is not often said, but hinted at by other players out there, is about stall-torque vs peak-torque, servo response and a few other parameters…but it is only hinted at, not truly explained, probably just to confuse end-users…perhaps one day I will do a bit of a write-up to explain why these specific servos were used, including things like inertia, efficiencies, high-res encoder, response and torque-characteristics…
Might make for interesting reading."
Thanks for your post, Phillip.
I’m another who would very much like to read what you have to say on this subject if you should ever get the time to write it down.
@ [EsxPaul] Personally mate, i wouldn’t worry about it one bit. I too have the 20nm i bought june 2018. i am so pleased with it. I have never gone over 55\60% of its power and to be fair, are you really going to notice the difference the small new features that come with version 2? i doubt it. Just enjoy what you have my friend and be blessed with the knowledge that most sim racers cannot afford any type of DD wheel
I don’t think anyone is worried about it but its nice to have an understanding. At least for me I find it interesting on how much really goes into this stuff when deciding on pieces.