I have a osw large midge and I have tried loads of setting that I have found on internet but I still cannot get this game to feel good the steering just feels really vague and the wheel is really snappy as it seems to want to snap to the center when I hit bumps or turning I seem to have to fight with the wheel.
Rf2 is only game I have issues with all other sims are gine
1 Like
Post somewhere your controller.json
Wouldn’t know how to post it on here
upload it somewhere else and give link. what is your psu btw ?
What is a psu please
don’t bother , just upload your controller json and give us a link to check it.
let me give you some thoughts for changes and you can check them yourself
“Jolt magnitude”:0,
“Off-road multiplier”:0.1,
“Rumble strip magnitude”:-0.5,
“Steering torque capability”:13.4,
“Steering torque filter”:4, (you can change this in game to test. you need that for some cars. but 4 is just an example , it could be 0 and feel ok but you may need more than 4 for some cars)
“Steering Wheel Bump Stop Harshness”:20,
“Stop Sequential if Neutral Configured”:0, (that is my preference)
1 Like
best way to do the changes is make a copy of your controller.json , open it with a notepad do the changes and save it and then rename it (name doesn’t matter but make it something easy for you to remember , example osw12.json) and then copy paste it inside the controllers folder of rfactor2 along with the other json files of other known wheels. And then load it ingame.
Tried that still feels awful hit a bump of kerb and wheel snaps violently seem to constantly be fighting the wheel
i don’t know how you did the changes but if you try to edit the controller.json when either rf2 or the launcher is open , changes don’t save. recheck the file if the changes did apply.
you have the 130ST-M15015 (large mige) or
130ST-M10010 (small mige) ?
if you have the large with 12A then “Steering torque capability”:13.4,
if you have the small with 12A then “Steering torque capability”:18.6,
have you tried with higher torque bandwith limit ?
Have the large midge and the settings went in fine never known a game so hard to setup it’s a joke
just to make sure, what car - track are you trying ?
Have tried various cars and tracks
Hi! Just trying to setup my small mige with rf2 and avoid the exagerated forces it delivers. I am not sure what you guys are using since there is controller.json from youtube´s skwimel video from June. But after that many of you are commenting other parameters but I am not sure if your basis setup of the.json is skeimel´s.
Could you confirm to me what your setup is?
I just deleted the controller.json and let rf2 create a new one. This is my actual setup…


Rgds.
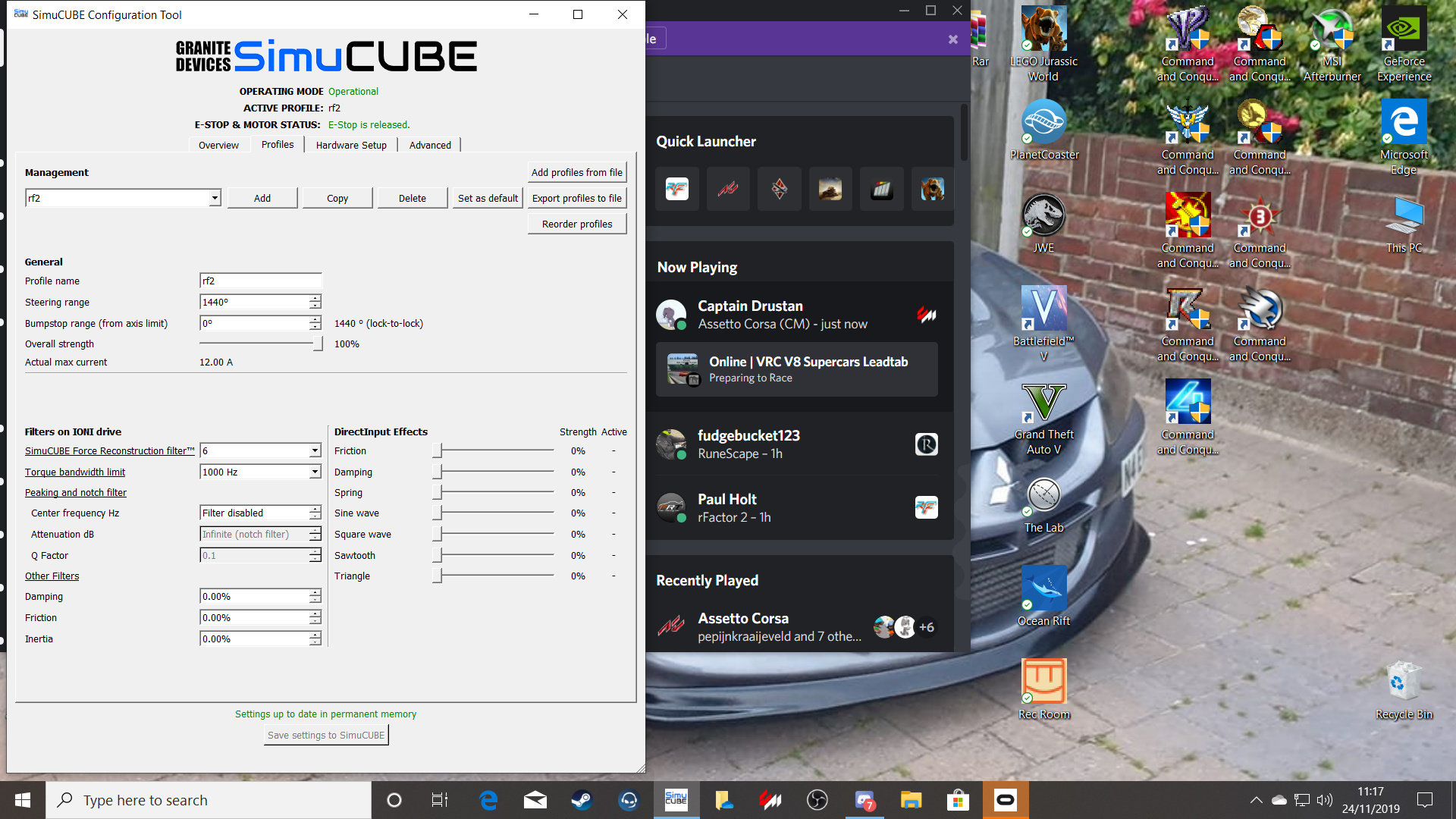
If you load the default simucube1 profile from rfactor2 change your degrees of rotation to 1440 in simucube and just lower Overall strength to lower than 12A. Try out to find what suits you more. If you don’t like the result i could either tell you some changes in the json or give you mine to see if you like it.
1 Like
Great. I will try and let you know how I feel this change.
Be sure that the FFB multiplier in rF2 is well below 1.0 as it can certainly result in clipping at that level. I generally use a setting between .35 to .5 and then adjust the Amperage to a comfortable range.
1 Like
Yep, I have to turn each car I drive down to at least .50 or lower or the forces are just way too high.