<Hi Guys,
Now, after having used this big servo for a while, herewith a quick overview of my thoughts on the Bogeyman vs Bodnar SS2 with 54G servo.
What is it, where to buy
The latest SimuCUBE/IONI-based DD wheel is the successor to the original Argon- and IONICube 1x/4x direct-drive steering wheels.
The very first version Argon-based wheel basically was born through the efforts of Bernhard Berger, one of our German iRacers, using an open-source code and communicating via RS-485 to your PC. Michael M (MMoS) later developed a pretty nice USB HID closed-source interface, running on the STM32F Discovery development board. First versions were Discovery/Argon-based hardware solutions.
Around this time I started discussions with Granite Devices to develop a better solution for FFB wheels, and first, the IONI was born, followed shortly thereafter by a nice small daughterboard, the IONICube 1x and 4x. This solution, when paired with the 32STM Discovery Dev board, flashed with the MMoS FW, provided many hours of joy to SimRacers globally. There however were complexities in getting these up and running, as well as dealing with EMI issues.
This prompted me to have the next level discussions with Granite Devices again - Tero and his team was superb in listening to my requirements, and thus the SimiCUBE was born. More on history here: http://members.iracing.com/jforum/posts/list/3491567.page
This brings us to my latest incarnation of the SimuCBE-based DD wheel, ‘Bogeyman’ - you can view the buildlog by following the next link, it should give you a good overview of the hardware used - http://members.iracing.com/jforum/posts/list/3581690.page.
Although, unlike the Bodnar SS2, reviewed earlier, which is developed for professional use, the SimuCUBE-based DD wheels are mostly assembled and supplied by a variety of iRacing members, a few below:
Ollie at https://sim-pli.city/collections/all
Tomo at https://www.simracingbay.com/shop/
Carlos at https://www.simracingcoach.com/en/contenido/kit-augury-osw/
Components
My specific unit is comprised of:
AKM65L servo motor (Bogeyman)
SimuCUBE interface and IONI Drive Controller unit
Motor power and encoder cables
Emergency stop switch
USB cables
Specifications
A wide variety of servomotors are compatible and available for use on this system, however, for the sake of an apples-to-apples comparison vs the earlier-reviewed Bodnar SS2, I am using an AKM65L servo with 2.1M CPR. a Few of the tested options listed below:
130ST-M10010 - 20NM (small MiGe)
130ST-M15015 - 28NM (large MiGe)
Lenze MCS12H15L - 25NM
AKM52G - 16NM
AKM53G - 20NM
AKM53K - 22NM
AKM54G - 24NM
AKM65L - 38NM
Please note the servos might have a higher torque rating, however, I am listing what is possible being driven via the 48V HV PSU, as commonly used in the SimuCUBE builds. I followed the same standard for the Bodnar SS2 servos.
Alos note the Bodnar SS2 Servos are not directly compatible for use on the SimuCUBE builds, as they have SFD encoders, with proprietary protocol. You could however, replace those with either BiSS, CoSine or Incremental Encoders, which are compatible. We have a few iRacing members selling kits/upgrades for a variety of Servos, Davy Watts being the main one.
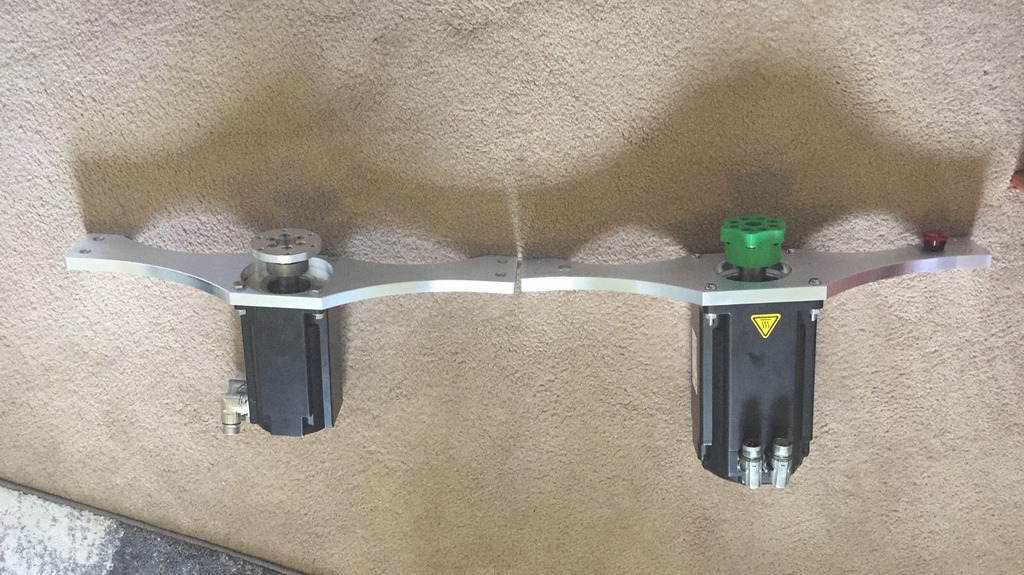
Installation
Mechanical installation onto my 8020 rig was relatively quick and easy - I had to remove my custom SS2 AKM54G servo steering mount, and replaced it with a new custom mount that accepted the much larger AKM65L servo. Other than that, I had to fab a new wheel adapter plate and use a 32MM ID Beltingonline split-bush, but the idea is very much the same as the Bodnar SS2 solution.
Electrical installation was painless, with simple plug-and-play connectors on the SimuCUBE. Nice and easy and very reliable for this application, although the ones used on the SS2 is more industrial and hardcore (You can however DIY the same solution into a SimuCUBE build, which is what I often do). The rest was connecting the USB B cable, and mains.
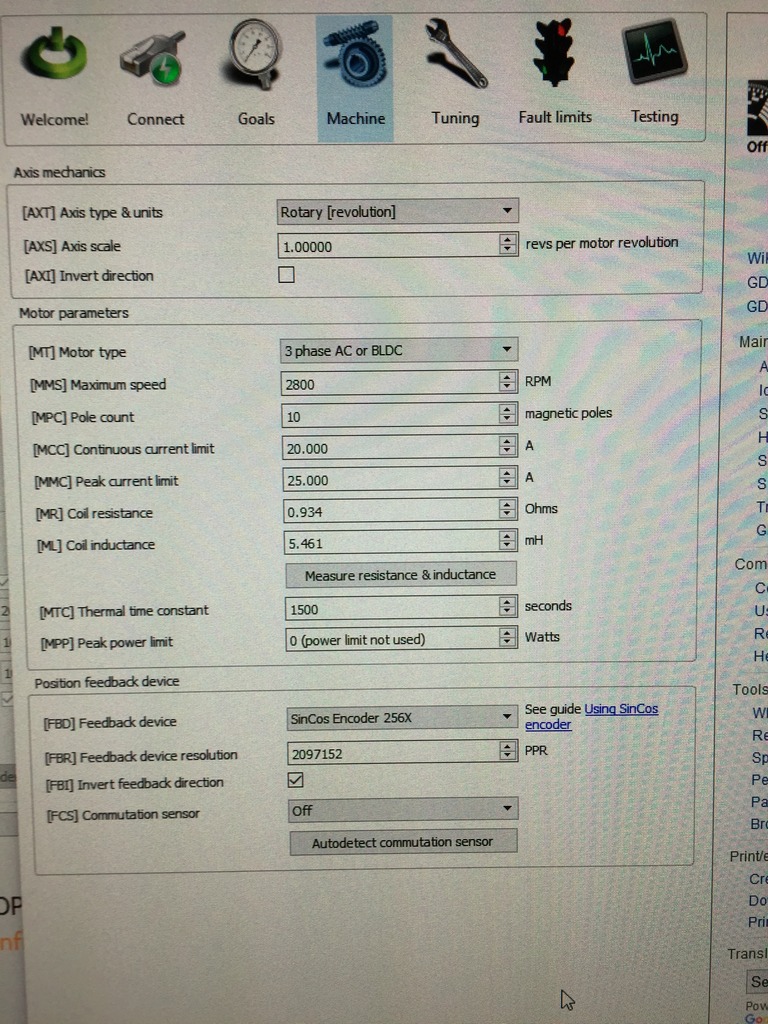
Setup
Setup is quick and rather easy, once you get the hang of the new Granite Devices TunerTool - this is the UI used to interact with the new SimuCUBE FW (non-MMoS) - it has pretty nice new features and filters compared to the old MMoS FW, which should allow anyone to tune to a FFB response they might like. One nice feature available here, as in the SS2 UI, is the graphical animation, showing the recommended calibration window and center position of your wheel.
The SinCOS encoder I have installed on this servo still requires the setup to go through the well-known phasing process, but it is quick and painless, and the wheel is available for use within 30 seconds after power-on.
Settings and Options
The User Interface is rather advanced, but well layed-out and specific features are available on tabs. Easy to navigate, should not take one more than a few minutes to get familiar with the general layout and operation. It is a very powerful user-interface, with quite many options to tune the final FFB behaviour to your liking. There also is a pretty good manual available that explains the basics, all that is left for you is to experiment should you wish to do so.
Some comments on these in the section below.
First impressions
The Bodnar SS2 is currently touted as the best DD FFB wheel out there - can it defend it’s title against this setup? Mmm…a tough one, please see my earlier impressions on the SS2 above.
My take on the Bogeyman - I will highlight both the good and the bad:
The good
I prefer to DIY my own solutions, as I select components, like PSU’s, based on the servo-requirements, rather than what would provide best bang-for-the-buck or best profitability. As such I can construct a quality-comparable solution to the SS2, which always was my aim. The Bodnar SS2 is a complete package, with (almost) all parts included to make it a complete DD wheel solution. In the DIY ‘OSW’ world though, I have to source each component/part - but, you can also find the ‘OSW’ as a complete package, see links earlier.
The Bogeyman wheel takes response and tracking accuracy to another level again, as the SinCOS encoder does inherently have a higher positional accuracy when compared with the SFD used in the SS2. I also find general latency to be lower, with an immediacy to input/output which is hard to describe.
As with the SS2, the IONI Controller is running at around 2million counts from the encoder (in my current build), whilst this signal is stepped down to ~65,535 counts, the maximum windows can handle. I have however successfully tested a 4M CPR BiSS encoder, mounted on a 53G servo.
Catching slides with the Ford GT3 around Motegi Twin, the BMW around Silverstone and the Mercedes around Monza and Yokohama is even easier than ever before, I suspect very much due to the low latency between the Sim and the Drive Controller. Counter-steer was intuitive and very natural, even better than the SS2. I could not fault the steering accuracy and response behaviour - even one would expect that the massive 65L servo, with higher inertia, would dampen things down, I actually found the feel to be closer to real-life than any DD wheel before, the pretty wild 38NM torque at 1:1 assisted in conveying exactly what the Sim was putting out.
Damping, Friction and Inertia worked very similar to the SS2 wheel, but the new Reconstruction Filter implemented in the IONI-side just take tings to another level - this has been my gripe with my SS2 setup, always making me think I was driving on over-inflated balloon tyres - instead of race-tyres. With the Recon-Filter, you can go from one extreme to the other, with everything in between.
I typically opt for setting 3, which gives me a pretty realistic race-rubber FFB response, whilst setting 5 feels like low-profile road tyres and setting 1, whilst providing the lowest latency, is just a bit to rough for my liking, reminding me of the older Argon-based solution with zero damping on the MMoS FW.
Overall, the best DD wheel I have tested over an extended period by a fair margin - I do believe Leo can attain similar levels of FFB behaviour from the SS2, but it will require a bit of effort on his controller and HID FW. Great potential, but that setup is currently been undone by a heavily-filtered input, even more pronounced now that I had an opportunity to compare both systems on high-end AKM servos.
Main area for improvement
Oscillation is one area where there is work to be done, not so much on the SimuCUBE FW side though, as that can be very well controlled with Damping/Friction/Inertia settings. The iRacing Simulator though, is very dated with a 60Hz FFB update rate, which can be felt once you reduce the Reconstruction Filter to 0 or 1.
To fully control oscillation at 1:1 38NM on this big servo, with Amperage running at 100%, I have to run Damping at 4.5%, Friction and Inertia at between 1.5% each. With the above, the wheel behaves itself very well, and no amount of enticing can induce oscillation.
At these settings, the wheel still feels very responsive and fast, I do not gain much in running zero settings here vs my preferred ones - but of course, having a faster Sim FFB rate would allow even more latitude (without oscillatory behaviour).
Recommendations
At this point, without changes in iRacing FFB update rate, I believe we are at the pinnacle of DD wheel technology, even spending big additional amounts won’t have a significant benefit to your experience.
This Bogeyman setup as is, is arguably the best wheel out there at this point in time, my determination is after many months of testing SS2, vs a couple months with this wheel.
With that said, building a solution such as this will take you close to the price of the SS2, so my advice still stands - always test before you buy, as it is a big investment and I am aware of more than one dissatisfied buyer, irrespective the DD wheel technology.
As always, feel free to discuss.
Cheers,
Beano


















 but it hasn’t helpen much yet.
but it hasn’t helpen much yet.
 i don’t get those people.
i don’t get those people.