So now you have mmc at 12 or 12.90 ? I would suggest trying even lower amps for testing , mcc 9.5 and mmc 10 . The best way to set mr and ml is the Manual tuning method that is writen here https://granitedevices.com/wiki/Tuning_torque_controller . But it is not that easy to do that. So automatic measurement of inductance and resistance is easier , but i can’t tell you if it is most accurate , not atm at least. When you do some testing with anything report your findings.
also have you checked your simucube and ioni for any signs of damage ?
I uninstalled the win update, same as before, nothing has changed.
as for damages, just a tiny scratch on the plastic of the back of the case and nothing else.
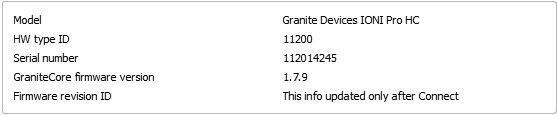
one thing, is it normal that on the connect page of granity is reported “this info updated only after connect” on the Firmware revision ID?
about the feel , did you try on another usb port ? how is your wheel connected ?(directly on a usb 2.0 or a 3.0 , or maybe via a hub) Have you tried any granity changes ? Seems to me like something isn’t working properly and from the info you are providing seems like hardware , but checking some software parameters can’t hurt and hope for the best.
@Mika ok, but I had just connected, otherwise all the other numbers - serial etc. - won’t show up.
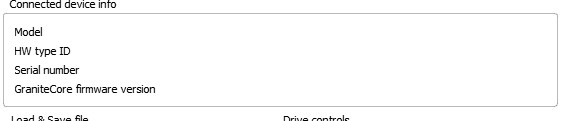
look, this is before connection :
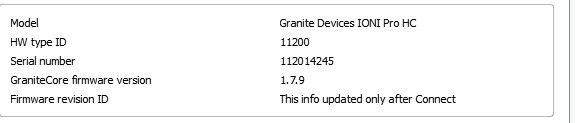
and this is after : @Loukas_Bourdas yes already tried changing usb port (it is connected via usb 2.0), and also all granity vhanges you suggested.
I just inspected the case and only thing I found that can be relevant to note is that both pins that serves as insertion for the connector of the encoder have both stuck to the connector of the cable. see there :
just to clarify , i didn’t mean damage inflicted by you. I meant dmg on the board , something that could be seen visually but not something that makes the boards totally useless. like this Simucube fails to start
Also as a sidenote , have you contacted the vendor ?
i didn’t imply you ever had such problems like overvoltage or fails to start , but i needed an example. Sorry for the misconfusion
ioni firmware 1.7.9 isn’t bundled yet with the latest simucube firmware. So you must have done the upgrade manually. Is there a possibility something changed at that point ?
there is no issue in this parameter value that does not display correctly. It does not affect the servo drive operation, therefore there is no need or incentive to reupload anything.
it all begin before I made the upgrade, in fact I made that upgrade to see if that would have solved the problem.
I want to ask one thing, is there any chance it can be somehow related to emi ?
I am asking because before having my first osw, I had for a brief time a fanatec csw 2.5, for which I had some problems regarding the force feedback that turned out were caused by a lot of emi produced by the wheel being mounted on a simètik cockpit.
at the moment I still have the same cockpit, but I haven’t done any isolation for the motor or the simucube case, but only for the pedals because I was having some problems (HE pro).
if so, what do you suggest I should do to eliminate emi?
ok so not firmware dependant. I saw the picture but i don’t think it can be the cause of your problem, ofc only if the cable can connect all the way even with pins stuck.
thanks, I had already seen this guide, but some points are not clear to me.
for example, I have the acrilic case of simucube, therefore I do not have the possibility to place one end of the grounding cable on one of the screws holding the psu on the case - as shown in the guide; screws on that case are so tiny there is no way I could place any grounding wire.
Anyway, I am using not-shielded cables for the kit.
ps. I just noticed one thing : I remember that when I put my hand on the wheel for the first time I tried to rotate the shaft bare hands - there were still no mechanical parts connected to it - and I distinctly remember how smooth it was during the rotation, no signs of any resistance or damping whatsoever. I tried doing the same right now and the feeling is just not the same as it was back then; I don’t know if it may depends on the fact that I am now rotating the shaft which is now connected to the qr and all the calmping parts, but I can very clearly feel like the rotation is somehow dampened by something inside the motor - ofc I am doing this with everything turned completely off.
It isn’t much noticeable if I turn the shaft very slowly, but if I turn it more fast - just a bit - I can feel this sort of damping, it is like a sort of grinding, it can be heard too if I stand close to the motor.
is it normal, am I just worrying for something that isn’t there or what else?
I think that the cables that your vendor provides are grounded but you can ask him to be sure.
You could buy ferrite cores and install them on your usb cables etc and they are rather cheap.
it seems off and i mean the thing you are describing about the servo but lets wait for what the developers have to say.
I have just discovered something I would have never ever guessed,
So, as I said the wheel rotation wasn’t smooth. In the last hour I tried unmounting the wheel from the deck, so I had to remove the cables from the motor.
And that’s when I made the discovery I am thiking it is the origin of my problems, or at least I guess.
I started by removing the connector that is at the end of the cable that powers the motor, and by total chance I discovered this : without the connector the shaft movement is smooth as it should be, no dampening whatsoever, but as soon as I just slightly place the connector to make contact with the pins - all of this with everything disconnected, keep in mind - that’s when the shaft begins having those problem when rotating.
I tried to make a video to explain it better, but it seems I can’t add the video to the post…
Maybe a problem with a resistor or the diode. Or I could think maybe it hasn’t discharged , dunno if you unplug the power cord from controller box and press the power button without power for some min if it can discharge completely (something similar to computers but you ll have to wait for a dev to tell you if that is a correct approach)