i think most of the servo noise volume difference is very small. i think its more of a frequency difference than a volume thing. but its very slight difference in the hiss ( no problems with crosstalk on high tbw settings on both that is fine)
back to driving doing a stint with the mercedes amg now @ nurburgring gp i will switch firmware halfway and continue testing in that same online session
I tested the new firmware with my Lenze setup and here are the learnings:
I updated the IONI firmware using Granity from the previous stable version. After the upgrade I usually click on disconnect and go back to simucube which reconnect automatically after I press the enable IONI button. In this case I had to power off and on the simucube to make it connect. (I waited 2 minutes but without power off and on nothing happened).
I tried the new IONI without modifying the parameters in Granity. The wheel worked well in iracing I did not find anomalies after 15 minutes of testing. (no big change in feeling compared to the last stable version)
I tried the ML MR measurement which caused a bad result and a strange noise last time. This time the vales seem to be correct and I identified no noise during testing so it seem to be ok.
I lowered the recon filter from 5 to 3 and did 15 minutes of testing. It was still ok I will keep it on 3. no anomalies no strange noises.
from tat short testing I can say that the new version seems to be ok. that reconnection thing doesn’t really matter for me.
after work I will do a bit mre testing with iracing and perhaps with assetto as well.
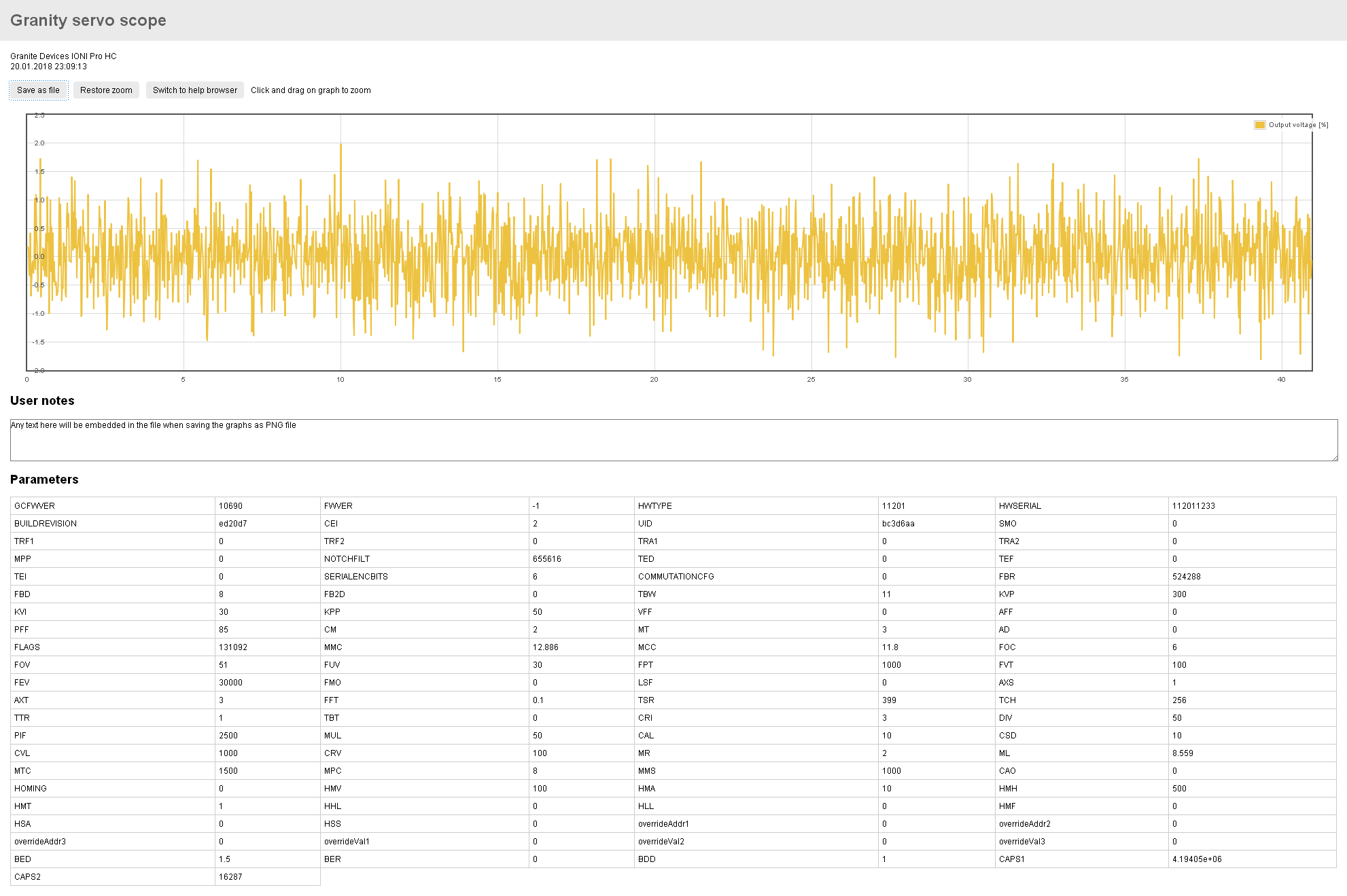
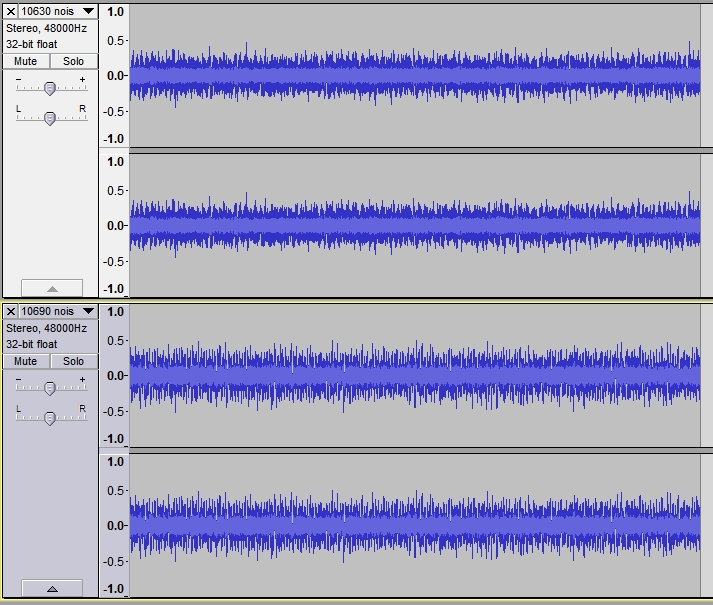
I measured static RMS voltage output noise output of each firmware version with a test motor. Conditions: TBW=1000Hz, SimuCUBE mode, all settings constant during the test, motor idling without torque or rotation.
Results are:
1.6.1: 0.571
1.6.30: 0.267
1.6.90: 0.269
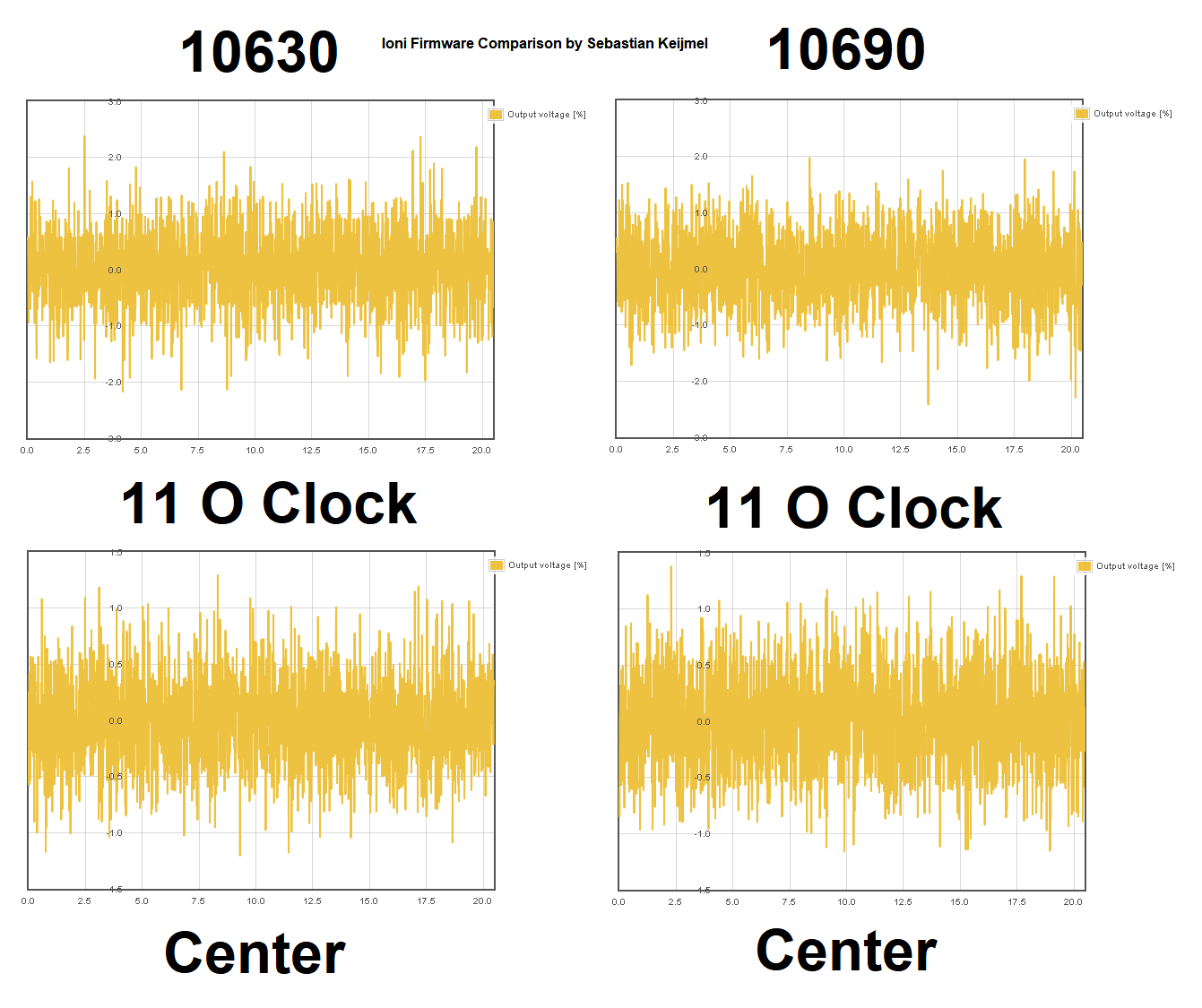
It looks like .30 and .90 versions have practically same RMS noise level, which is expected result as filtering method was not changed between the versions.
cool results, i never went back to 1.6.1. but i recall a big difference in static hiss between the new ones.
(no need to go back to 1.6.1 the last two beta’s are better than that one )
where did you measure the noise? at different parts on the wheel or the middle ? i measures the nosiest part with the wheel a bit too the left. ( 11 o clock aprrox )
Just a silly question. What is the real difference in feeling between unlimited and 1000hz tbw?
I know i know the official answer that higher hz is sharper lower can be smoother but we can have some lag or loose some kind of details but anyway is there anything which i feel e.g. in iracing or assetto between the two modes?
unlimited is smoother feedback for me its a clearly noticeable difference between the two in iracing.
i would say the higher the smoother 1000hz still feels sharp. i would advise everyone to try and run unlimited.
(you must try it with 10630 or 10690 beta ioni firmware dough)
It is a low-pass filter, which by definition smooths out the signal, allowing lower frequency signals to pass the filter. Unlimited disables the filter. The latency of this filter is negligible for simulator use case.
The other thing i do not understand is in simucube. The center frequency, attenuation and q facotr. I read the description but the question here is the same what should i feel if i set it correctly and what should i feel if it is totally wrong. I tried different settings but iam clueless.
I’ve been driving the Porsche around road Atlanta for a couple of hours with 1.6.90, previously on 1.6.30 - I have not encountered any problems and to be honest I can’t tell the difference between the versions. My small mige and 10k encoder feel great - a big thanks to Mika, Tero and the team of testers for making my osw better and better.
It might be interesting to have some sort of ffb test in granity with the wheel moving left and right or something. so we can see what it does during actual movements / ffb signals
@Tero : Like @Mika said, with my Hirden 2500CPR sound in my steering wheel with the last IONI firmware 1.6.9 and the IONI damper. More damper, more lound sound… Change torque bandwitch number doesn’t change anything.
I never use any damping, but i tested it now and i too have to report that it sounds like searching for a radio channel.
When you turn the wheel now and when you put damper even higher it sounds like a old arcade game. didn’t have that problem in 10630 either.
my gopro mic doesnt pic it up that well but its pretty loud.
 the last two beta’s are better than that one )
the last two beta’s are better than that one ) I’m looking forward to perfect it for all motor types out there.
I’m looking forward to perfect it for all motor types out there.