Hi,
I‘m back at the old IONI firmware …
In DR I had 6 overcurrent faults since yesterday after installing the new firmware, while I had none since the beginning I was using SimuCube (MMOS and SimuCube firmware)! I even have the max power slider at 80%.
I have a modified effectsetup_v2.xml file with modified feedback for tire slip, but this was in use since several days now.
Setup is small Mige with Heidenhain encoder and ndr480.
458 GT2, 7.2 Amps running 50% in AC
And when I say I can’t feel anything, it’s like the wheel is almost completely free, I end up completely messing up turn in
Please post screenshots of all your Granity settings. Do you actually mean overvoltage faults?
It’s not a fault thing. It’s gradual, I can feel the self aligning forces build up, but I get way less detail, & it’s very light on turn in, then weights up.
Just done a noise comparison between 1.6.1 and 1.6.30. Using the mige sincos I definitely have more noise with .30 than .1 With .1 I struggled to find a point on the wheel where I could feel the noise and when I did it was quite faint. With .30 i can find numerous points on the wheel where I can feel the noise. Some places where about the same as .1 at its worst and others where it was about 2 x more prominent.
Audible noise wise its about the same.
Hi Mika,
what info do you need in detail?
After switching back I had no issue for 1,5 hours of driving in DR with all kind of cars - faults where happening for non 2010 cars, where I really already felt quite strong FFB.
I anyway noticed that FFB is quite different for some cars since the new max. Current was introduced - some cars like the Lancia Evo 37 are close to break my hands while others cars are not giving any feedback at all. For now I’m trying to optimize the 2010 cars using the effectsetup_v2.xml and then I hopefully can use the in game settings to choose a suitable strength for the other categories (for the Evo I need to reduce some sliders quite a lot to get a FFB that is matching my expectations.
I need general overview of the settings in Granity.
Hello, I tried the 1.6.30, I removed 8.4 simucube and I went back to Mmos, and the sum of 1.6.30 and Mmos gives very good result, sdr 480/720, big mige (Augury), ionipro hc, I tried it in Rf2 , Automobilista and it’s going very well, but in AC it makes a horrible noise when I go out on the track and it blocks my steering whee
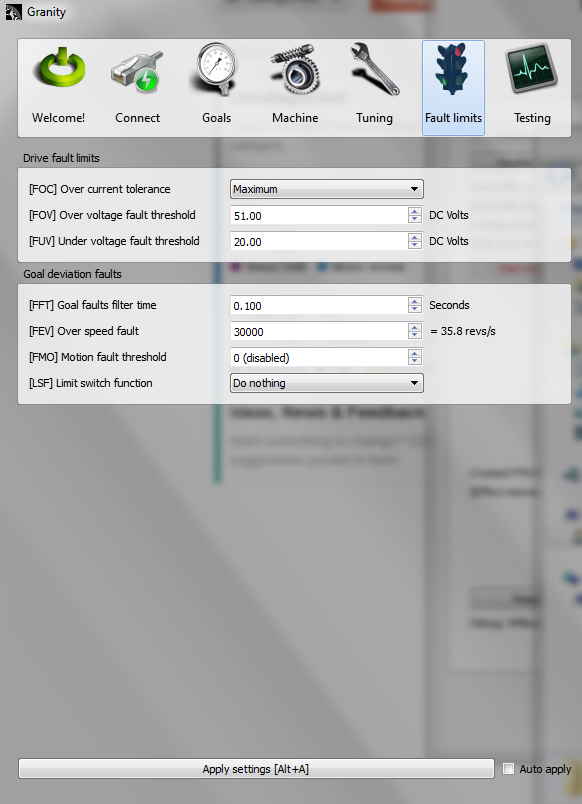
Hi, after some testing with the new firmware (1.6.30) i have a more detailed ffb but the motor comes faulty quite easily (FUV - under voltage fault). So i tried to decrease FUV from 30 (standard value) to 20 and with better results but still fails under big shakes (crashes, some big saves…). With old firmware i was running FUV at 20 too without problems. Seems that trying lower values could be risky?
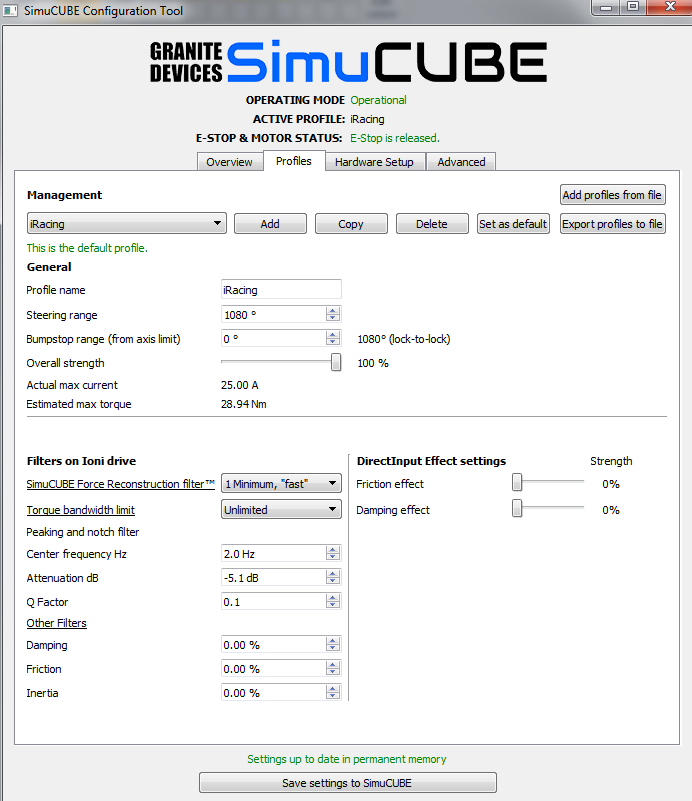
SimuCUBE based OSW kit with CM110 case
Servo Motor: MiGE 130ST-M15015 30Nm (SinCos)
PSU: Mean Well 480W/720W peak (Noiseless) 30Nm
Servo drive: Ioni Pro HC (25A)
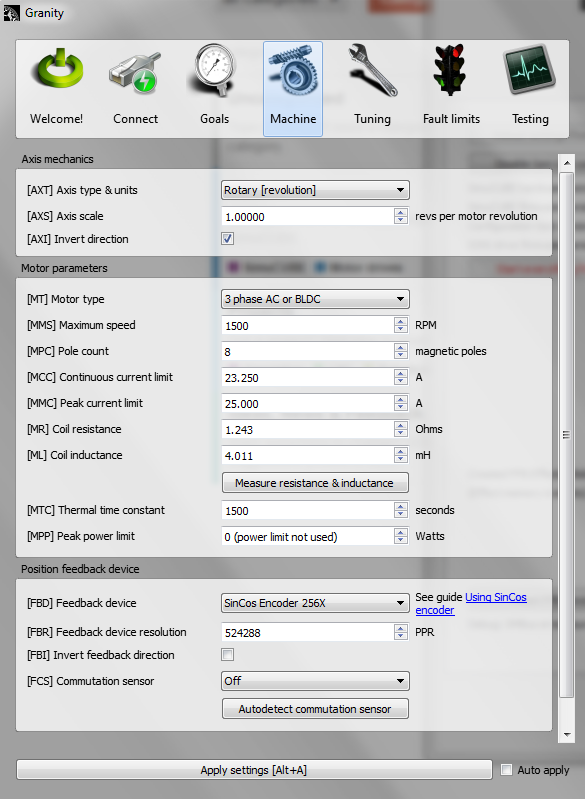
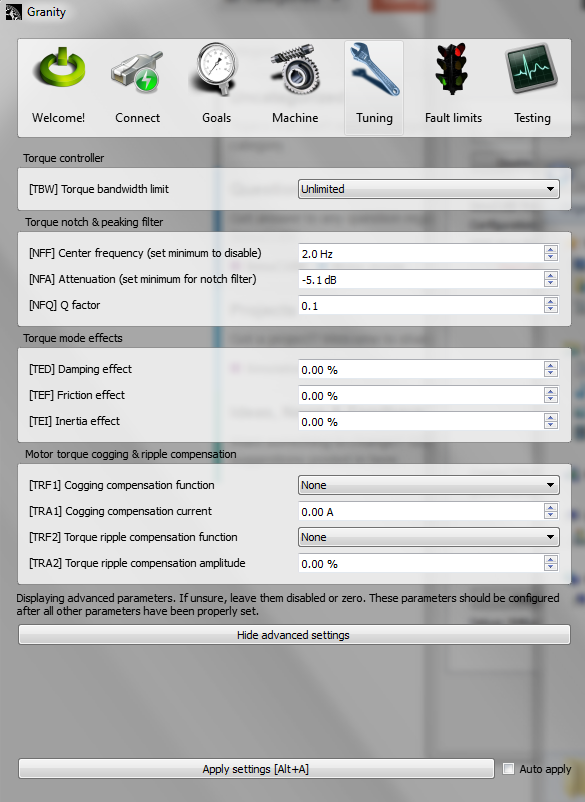
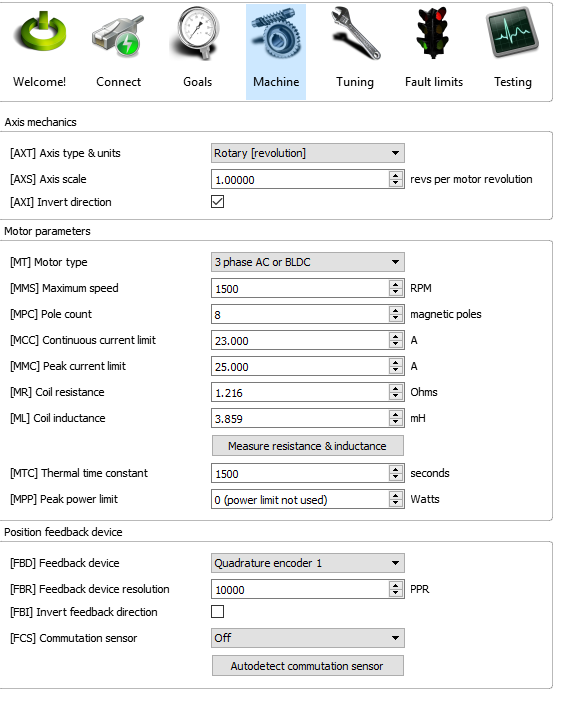
Granity settings:

Thanks.
Hi,
after sending my settings to Mika he suggested to set Over Current Tolerance (FOC) to maximum - I used very high before - and I had no over current fault in DR since then.
Mika thanks for the quick response/solution!
I have Large Mige system and updated to beta 1.6.30 firmware. It has been working fine for several days. I post this info to assist Mike and others in case this has any significance to issues others are having.
In 1.6.1, under Machine, my measured (MR) Coil resistance was 1.247 ohms, and the measured (ML) Coil Inductance was 4.461 mH. After flashing 1.6.30, I did “Measure resistance & inductance” again, and it is now MR 1.216 and ML 3.859. Noticing the difference, I measured several more times with consistent results. I don’t know what these values do, and it may not be material to anything being discussed, but I thought I’d throw it out there for the experts to discuss.
1.6.1 Firmware

1.6.30 Firmware
As I’ve understood it, the measurement should work the same. Maybe @Tero has an input or interest to look at this.
for the people who say they lost feel i got a tip.
Move tbw back to 680 or 1000 if you where running unlimited now. it makes the ffb less smooth so you can notice details like oversteer more clearly. if my testing from just now is correct:)
Regarding the MR and ML calculated values: I reverted back to 1.6.1 and measured resistance and inductance, and I get the lower values reflected in 1.6.30. I am quite confident that when I first installed Granity after acquiring my system I had measured at the higher value. Very strange. Would these values change in the motor over time or with use?
Hi
I have just installed this firmware and the servo became noisy. i have a lenze servo and with the previous version it was quit. No noise at all. But after installing this one i have a constant electrical sound when i turn the wheel. Is this normal? What should i modify in the config to avoid this noise?
thank you in advance
best regards
Szabolcs
This is now a known issue, and you can use the non-beta version of the IONI firmware.
Thx for the qucik answer. I hope that it will be eliminated easily.
You can also see Tero’s comments about this issue here:
… and the following posts after that.
Summary: Something goes wrong in the new beta IONI firmware when measuring MR/ML values, specifically evident when using Lenze servos, but you can manually set those to reduce the noise.
Szabolcs I am the other Lenze driver and glad to hear I am not alone 
Mika, my MR/ML values only work with reconstruction filter ON (1-10 doesn’t matter) If I turn of recon, the Lenze is noisy no matter the ML/MR values. This is indicating to me that something is wrong - no other ioni firmware leads to a noisy Lenze.
I hope there will be a real fix. Until then I am driving 1.5MR and 4.2ML.
Hi
I am sure that they will fix this issue. And i am sure that the problem is caused by the new ioni firmware.
Question: do you feel any difference if you use manual settings in ml and mr?
Szabolcs