If you want the extra surface detail use irffb. And like mika said ofcourse accuforce cannot do magic they will have the same added latancy if they use the telemetry based effects just as irffb. 60hz default wil always be the lowest latancy. And my humble opinion the accuforce is a way inferior wheel compared to osw with miges
I would agree that the OSW holds a significant advantage in terms of the hardware but, from my experience, the AccuForce offers superior versatility. Perhaps not many people are concerned with that. There are things that I enjoy very much about both systems but, it’s very difficult for me to pick just one because, each has its unique strengths. A combination of the two (OSW+Telemetry Effects) would be my dream system.
As far as the actual FFB is concerned, both systems can provide excellent FFB but, not across all titles in the same way. The AccuForce system gets my vote for best FFB in the most titles easily because no amount of tuning the OSW can result in the same FFB as the AccuForce in certain titles. Dirt Rally is one such title and iRacing may be another one but, I have not yet tried the irffb to compare results.
Even in titles where the two systems do compare more closely, SimCommander offers some unique enhancements to add things such as Rear Traction Loss, Engine-Vibes, Bump-effect customization, and additional ways to filter the game FFB as well as individual effects using various secondary filters based on other factors such as speed / frequency / Acceleration / RPM’s, etc.
Granted, most people may never use such things but, for those of us that aren’t afraid to dig deep into the possibilities, there are some very useful and creative ways to add more immersion to FFB while also improving synchronization with other feedback systems.
For example, something as simple as Engine-vibes can be added to the FFB and sync perfectly with Tactile systems. As a result, there is a certain symmetry and harmony that occurs among the feedback systems that is very subtle at first but, when absent, becomes quite obvious.
So even though the AccuForce cannot provide the same punch and raw power of the OSW, it does excel at providing more subtle and immersive effects through SC4 and can greatly improve steering-FFB with certain titles by using telemetry-based FFB effects. That is my conclusion after using both systems for recent years.
In terms of the future and DD-market, the Fanatec Podium series remains an unknown factor but, if they can provide similar torque and reliability while also having an advantage in tuning features combined with their existing and advancing hardware eco-system, it could become a very attractive option for Sim-racer’s progressing to more advanced hardware.
On the other hand, if SimX were to join forces with another DD-system provider, that would also make for a very attractive combined option for those more interested in maximizing FFB immersion with a potentially more robust servo-system. SimX sells some copies of SC4, the users that want it get enhanced FFB options and the hardware-provider cements their position in the market even more - win / win/ win.
Initially, I too, preferred the OSW system over the AccuForce but, as time has passed and my experience and tastes have evolved, as well as having expanded my rig to include tactile and motion, I now appreciate the additional features offered with the AccuForce system much more than I did before.
Of course, few people have the luxury of comparing DD-systems back to back over years of use and it’s impossible to account for the subjective factors in personal FFB preferences. So, it’s understandable that many are not keen on adding more features. After all, simplicity also has it’s merits.
I read many posts in the iRacing forums of members seeking greater immersion and I think we are at the point with FFB that it’s really about the fine details that makes the difference when it comes to immersion.
Kunos has said (with tongue in cheek) something like, it’s much to do with “Placebo” when it comes to “Simulation Value”. That may be especially true when it comes to FFB and immersion. 
Neat idea!
I’d be one of the people who would buy SC4 to have the depth of those tuning options with my OSW.
That idea was discussed early in the development of the SimuCube Firmware but, was decided against IIRC. My understanding is that SimX already has the foundation in place to add support for a generic DD wheel but, they never said what it is intended for when asked about it.
With the overall dynamics of the SimuCube system being what it is, the prospect of having such options is very intriguing. Even after having used SC4 for years, I’m still learning new tuning tricks with it. SimX are very good at squeezing every last drop of goodness out of the hardware they develop for and the tools they have in place for Auto-tuning effects are quite effective.
Yea there was talk in the beginning of SimuCUBEs firmware development a bit to possibly get SC4 support but somewhere those talks fell through not sure if it was just development needs differences, IE sim commander needed more control over the Firmware than Granite was willing to give them, or if it was some other issue…
Having run all of the units for a little while at least… The Accuforce does offer a lot of detail options and is a great option for someone who, won’t, doesn’t think about, or doesn’t know about the specific output fidelity that comes out of these when set right for that use.
With the Accuforce at closer to its limits use you can actually feel the software trying to keep everything in check, which for me is a drawback to the immersion of the wheel even with the add ins to help bring back that feel. Granted if I never felt anything else I might not have known that it was pulling punches and adjusting things to be able to produce what it produces.
With the DD1/2 from Fanatec I don’t think you are going to get much more options than you would have with the CS line of wheels unless they open up an advanced mode on the wheel to allow more extensive tuning, I am guessing though that even though Thomas has floated that option down the line it probably won’t happen due to business model reasons.
irFFB is the closest thing we have to being able to add effects and it is pretty good at it.
The SimuCUBEs real advantages lay in the fact that it has massive adjustability from a raw feel standpoint, and you can get power from it (with the right servos) to be completely realistic on the level of fatigue and force needed to drive the cars.
Which Hz should be set at IrFFB with a large Mige and current Simcube SW?
360Hz or
360 Hz interpolated
60 Hz direct filtered 360
60 Hz direct filtered 720
thank you for your help
360Hz is the telemetry read setting… all the others are interpolations… NLPrint says the 60Hz Filtered are as good as the 360Hz but are of course still based on the 60Hz original signal.
I would use the 360Hz signals as this is really the only upgrade to signal quality for the SimuCUBE since the Reconstruction filter does its version of interpolation of the signal.
Personally I feel that irFFB is best used for the telemetry add ins if you use lower power and lose those details. otherwise the SimuCUBE with the SimuCUBE Firmware is fully capable of providing a clean signal.
Thanks for your information. Then I set it right. Uses 360 Hz with big Mige and 7.9 A.
I find the effects with IrFFb so absolutely TOP.
I tested irFFB last night for quite a while. It’s a bit better than iRacing FFB for me but, the details are not even close to what can be done using SC4. I still feel the best FFB I’ve achieved in iRacing was with a combination of iRacing-FFB for the fundamental effects and SimCommander-FFB for the details. Being able to add that capability to SimuCube would take FFB to another level in iRacing imo.
It’s something I would be willing to pay for or if another DD-wheel comes along that offers something similar, I’d be very interested. I’m not sure what Fanatec can achieve either but, OSW-SimuCube performance plus telemetry features is something I’d love to try.
I’ve also done quite a bit of testing recently with Dirt Rally using SimCommander and it’s really impressive how telemetry-based FFB can add a whole new dimension to the FFB in that title. The Foundation + Suspension-bumps + Road-bumps combined to offer FFB that many Rally-sim fans can only dream about.
The same FFB simply isn’t possible using the game-FFB settings. Once I found a good balance between effects, I could feel every change and transition in grip-loss on every bump, surface change, on-throttle steer-torque, over-steer, and more. I could choose if I wanted to steer the car with more steering-input or by throttle-control and know how much was needed for optimal traction.
It’s far more detailed and informative FFB than can be experienced in iRacing RallyX and that’s coming from a CodeMasters title. Seriously, someone needs to figure out how to combine these systems in the most effective way and I suspect SimX has already done most of the work with SimCommander.
3 Likes
I’ve never done a thorough recorded comparison but, neither one stands out as being faster in my mind. I think I adapt to either system pretty quickly and lap-times are very close and consistent. The more notable differences for me are in terms of immersion but, that also can vary by title.
1 Like
Augury simulations have post on their website a suggestion for a better FFW
“The tests were done with the 18Nm servomotor , with other servomotors we will change the force within iRacing”. Not a lot ppl have the 18nm motor [130ST-M06025] but ofc you can change some parameters for the 20nm or 30nm mige.
Hi everyone. I recently purchased Mige ST130M10010 20nm, 22Bit BISS-C Encoder 4,194,304 CPR with IONI Pro from https://www.simtechracing.co.uk/ and I’m now about to get everything setup and was just looking for some advice if possible for some baseline settings to use.
I noticed some settings shared on the iRacing forums, which many have referred to in this thread. I’ve taken a look and it’s all quite overwhelming and a hell of a lot to look through. Lots of very good information has been shared in Brians posts on the forum which I fully intend on reading thoroughly and playing around but for now i’d just like to get some settings configured to get me going. Not sure if anyone could help me out?
Some of the videos I’ve seen are referring to different motors, or the same motor but slightly different specs or encoders, so I didn’t really think it would be a good idea using those or messing too much before maybe getting some advice here as this forum seems to be full of guys that really know there stuff.
Thank you in advance.
hi bunnsnow take a look at SKeijmel’s settings its a great starter point for Iracing. he has a youtube channel as well
thanks, yeh noticed his settings earlier and have configured similar to that for now. Think the only difference is he was using the old encoder, but guess it’s no biggy. He also doesn’t appear to be modifying anything in granity. Is there much advantage to configuring more settings in Granity?
This is what im currently using: https://ibb.co/0Cng9rD with SKeijmel’s app.ini changes. Doesn’t feel too bad for now. Will read up more about Granity.
you can modify settings in granity and get a different feeling. better or worse , that is subjective. you can upload photos of granity here and see if there is something that needs to be altered.
Usually there are no settings in Granity that need to be altered. Only thing that can affect the feeling is the MR and ML parameters, but typically people do not change them.
OK, that’s good to know. Thanks.
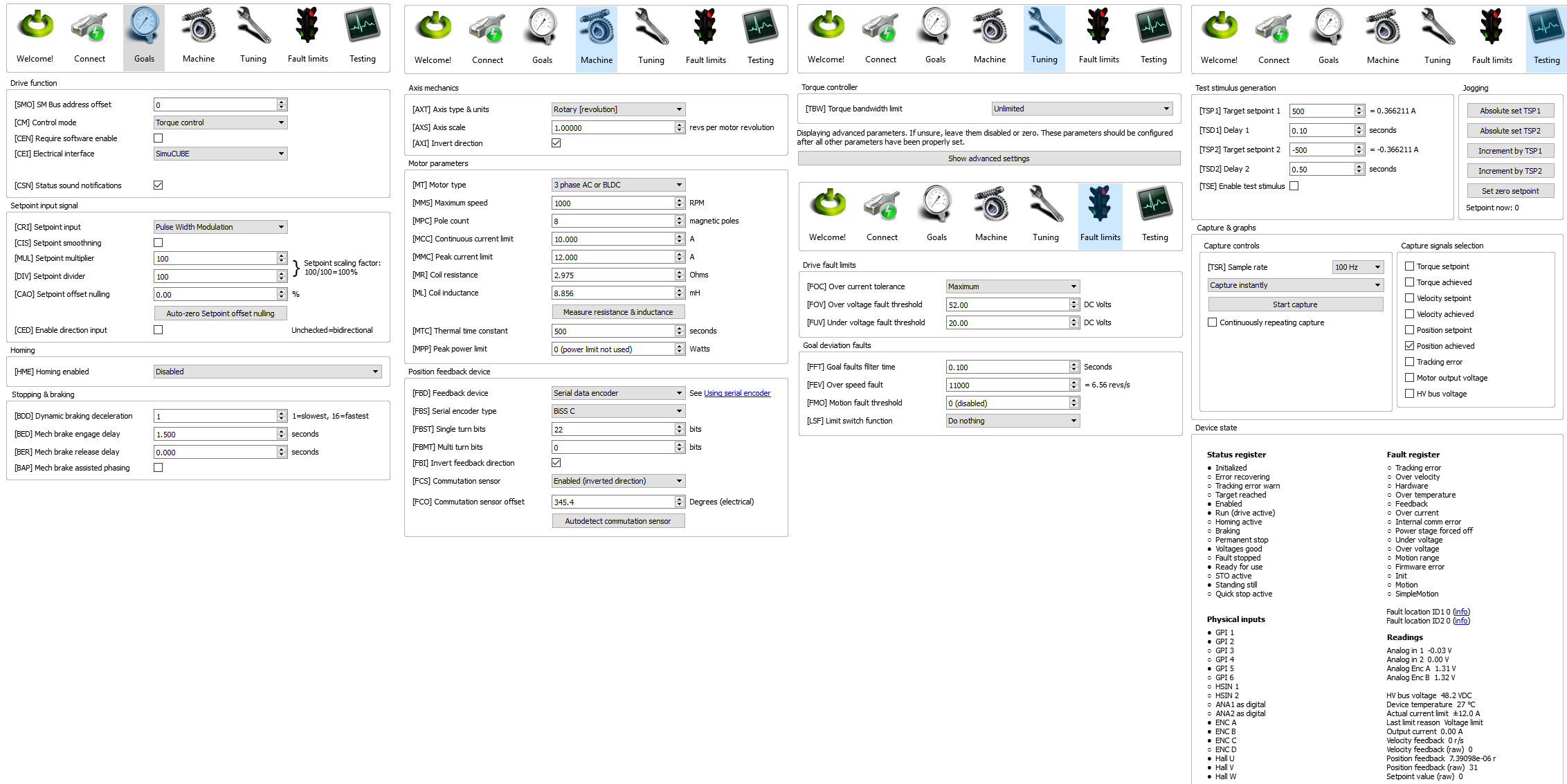
Current Granity settings attached anyway in case anything is spotted.
speaking of wich , i read the opensimwheel tutorial from ascher-racing and he points out :
- 130ST-M10010 perfect settings: MR 2.6; ML 11.5 * . But i don’t have a small mige to test them
 .
.
@bunnsnow . Other than MR and ML , sometimes you can get different feeling from the mpp setting , you could try that at sometime , and also from the difference between
Mcc and Mmc . Since you recently purchased the wheel , i would advise you to just run with it as it is. Those settings that the wheel came with are fine.