Excellent, thank you. I’ll have a read up on the MR, ML, MCC and MMC settings and understand what they are and what they do and then have a play changing. Thanks.
One should not trust the MPP setting, as it is a power limitation and is depending on the IONI servo drive and its specific firmware. Any “good” driving feel one can get with that is purely coincidental. However, we are of course interested in reports about any good settings.
should i start a new thread or do you have a specific old thread in mind ?
about MPP?
The power limit in IONI is not very accurate, but it is enough in most applications. However, in Simucube application, it will cause undesired torque ripple effect. As the effect isn’t really meant to be used to alter the feel, we don’t recommend relying on it to do so. If we ever change the algorithm on IONI, there will be a change in feel.
If you have iRacing this link will give you pretty much all you want to know regarding the set-up as well I believe it is post 5 has several sample setups you can use as a starting point.
http://members.iracing.com/jforum/posts/list/3573261.page#10702253
Thanks Brion, did find that forum thread. Quite overwhelming the amount of info there. Bit scared to mess with settings in case they were not meant for my specific setup. I’m back on there now having a read though as I wasn’t too impressed with the wheel after a few races this evening. Need to have a play. Thanks for sharing again.
https://www.simtechracing.co.uk/products/osw-sim-racing-ffb-steering-system?id=730809
“Powerful UK Designed single 480w (48v 10A) PSU specifically designed for Servo Motors”
Which DRC should I use?
10010_MAX_480w-48v_BiSSc(22bit)
10010_MAX_unlimited-48v_BiSSc(22bit)
Either will be fine, as the small Mige wattage requirements at 20nm doesn’t exceed the 480w psu capacity.
Cheers,
Beano
1 Like
As Phillip said either will work… since you are generally above what the Small Mige would need and based on some comments made by Mika about the way MPP works I would suggest running the “unlimited” unless you are having issues with the system faulting on low voltage.
As far as settings, you can mess with anything within the SimuCUBE Configuration tool and NOT get yourself into trouble… Just may find things that feel bad or not to your liking… The main filtering D, F, I are going to be the ones you use the most. You can also take the wheel from being very Active to very subdued… HOWEVER the small mige does have some issues when you make it really subdued as it can start to feel a bit laggy as it is in its nature to be more active.
Thanks Brion. I’ll load up the unlimited file. Then Ill just have a play with the simucube settings, see if I can get a nice feeling with D,F,I etc. Tried a few this eve but I just couldn’t get a nice feeling. I was testing In the Dallara F3, I’ll give some other cars a go as well. Thanks.
Just wanted to say thanks for the help offered here. I got the unlimited file loaded and used some settings from Brions post on the forum as a baseline, had a little tinker myself from there and the wheel is feeling fantastic. Only car I seem to have issues with is the F3 in iracing but from what I’ve heard from others the car is a little broken. So I’m all good. Thanks 
1 Like
Followed pretty much all of skeijmels settings, but somehow when calibrating it never hits the bumpstop
i set the app.ini and simucube just like his but I can pretty much turn the wheel infinitely and have to stop myself at 900 degs
Do you have the latest simucube firmware, and have you read the known issues here:
I have 0.11.2 installed
Can you clarify this?
Known issues
- When installing this firmware to an empty device or when migrating from MMOS, FFB and endstop effects are missing.
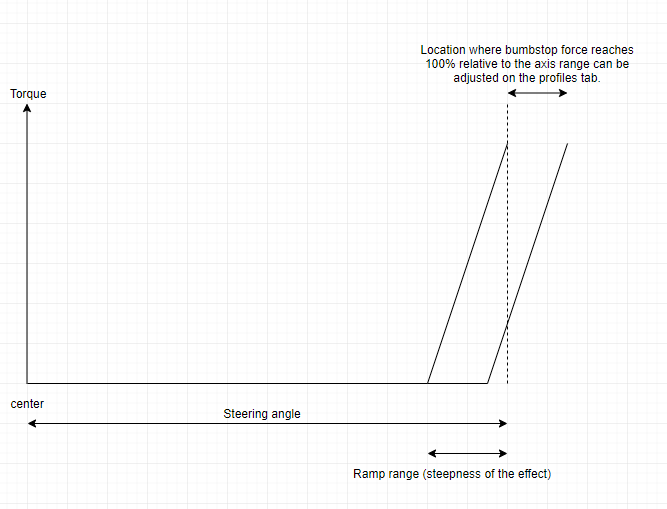
- Workaround: Set bumbstop effect ramp range to higher than 1 in the Configuration Tool. It can then be changed back to 1 if user wants that.
Does this also work for negative values as per Skeijmel’s settings?
The ramp range parameter is on the Hardware tab, and the bug only affects that settings as far as I’ve diagnosed it. No other bugs have been reported.
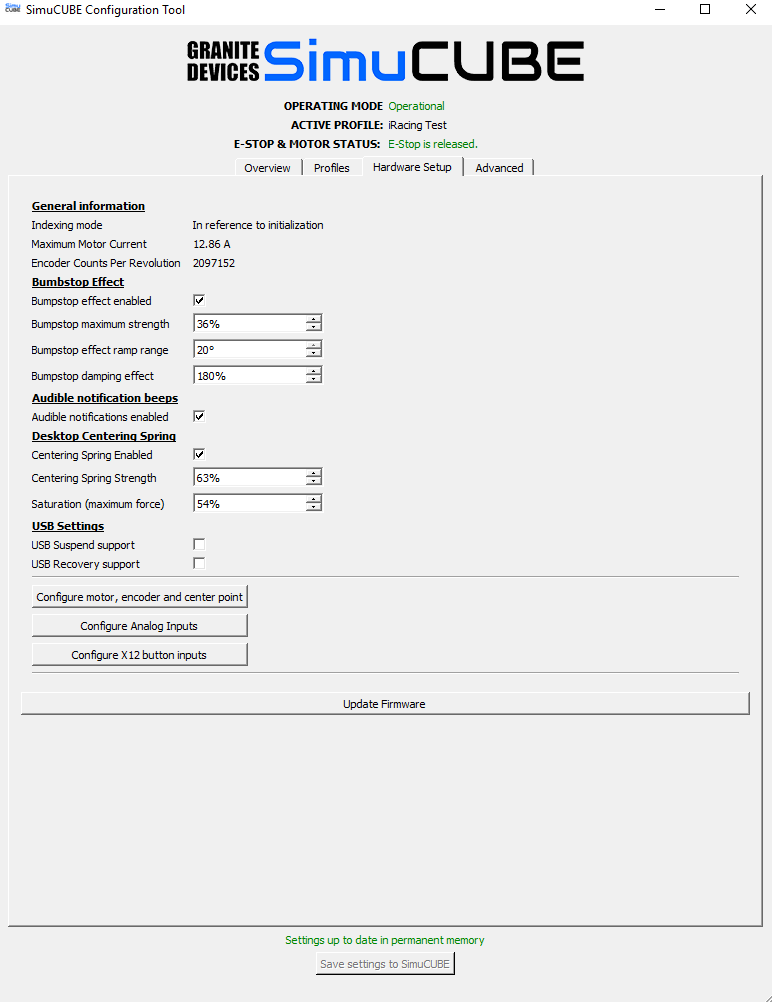
Ramp range cannot be set to negative. For new installs, it is being mistakengly set at 0 even if the UI shows 1. This causes a division by zero error in the firmware, and will result in bumbstop effect torque of 0 always overriding any other effects, i.e. FFB level of 0 is always produced.
Just set it at least once to any other value than 1 and then it starts working.
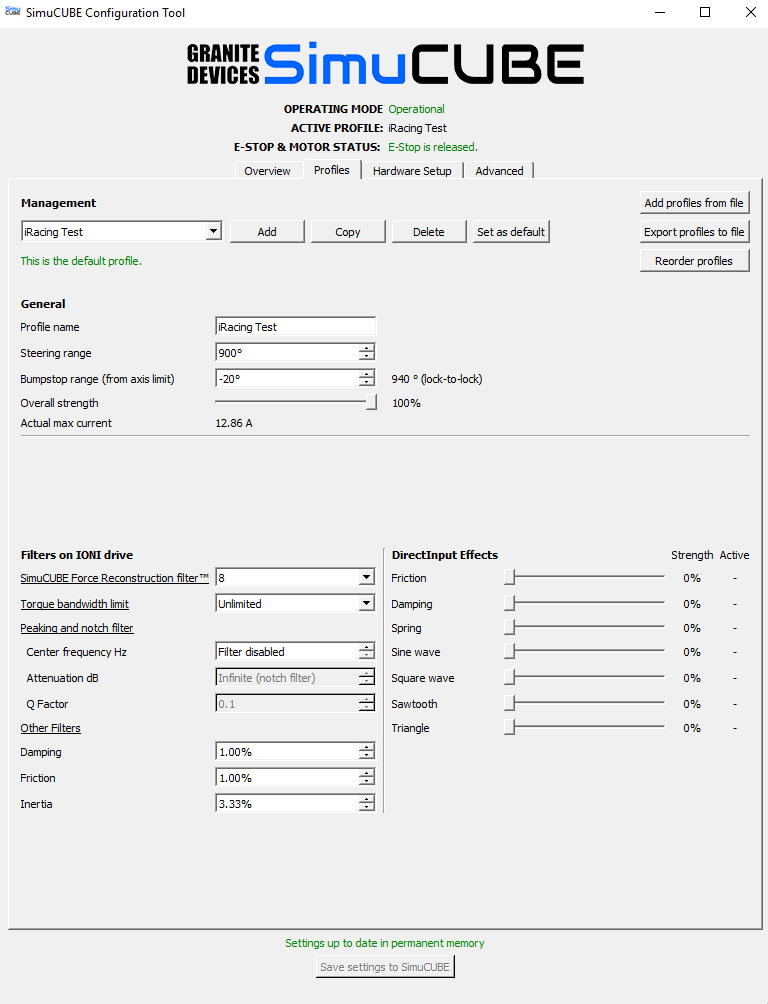
So I am good at 20 degrees effective ramp range, and the bumpstop range in the profile tab at -20 degrees?