that dottinger hohe straith is the problem itself. its very bump or buggy or wathever in iracing. at high speed with the 60hz ffb signal from iracing its really jerky and bouncy all the way thats just the way it is.
Different Cars will react differently to different settings… The Filter settings are in a way meant to liniarize the servo Only and not generally meant to impart feel into the wheel but alas this is what we use it for to a degree as well as to fix servo based colorization. Generally the closer you have the servo to being exactly controlled the less car to car changes in behavior you will experience. @GlobeSpy , the settings you currently have are close to the ones that I posted in iRacing for the Small Mige with SinCOS though I think I actually deadened the wheel more with additional friction and the Recon at 5… I found those settings to control the servo in almost all circumstances with all cars while giving good road feel at higher than average power settings… Reducing the power settings allows for less filtering because less control of the servo is required. Personally I feel that Damping is needed in all circumstances to some degree as it helps control the off current speed of the wheel keeping the servo from spinning more than needed before getting additional signaling which helps reduce Oscillation in some cases. It’s effects diminish as the wheel rotates slower. Friction of course is sort of an overall braking effect and is where you can get that “in the road feel” as it adds an overall weight to the wheel. and Inertia tries to keep the wheel moving so it sort of works opposite Daping as that as the servo rotates slower it gives a small signal to keep it moving… It is meant to overcome the internal inertia of the servo to control the coast speed of the servo but in our case it also adds low speed resistance… I have found that getting a correct balance between Damping and Inertia settings is crucial to getting really good transitional (over center) feeling when using reasonable damping as when damping rolls off (slow wheel speed) the wheel gets lighter in feel, adding some inertia can help keep tension in the wheel to produce a cleaner transition from a Spindown to a force. It’s complex really but play and find out what you like and try a bunch of things… Generally the Small mige though requires no to minimal inertia as it doesn’t have much weight to the armature. and BTW the weight of the armature INCLUDES your wheel. So someone with a heavy wheel on a Small Mige may have the same overall inertia as someone with a light wheel on a Late Mige.
You are right, and this discussion has been had here before between Sebastian and others.
The settings for the bump stops and co are great, but the firmware settings used by Skeijmel also feel completely wrong and weird for me. I believe his philosophy is not to use any of the filtering to not “hide” any of the FFB given. In my opinion this just makes the wheel overshoot and oscillate like crazy and “just hold the wheel” as a fix is not acceptable for me either 
Luckily we can set these things up to our liking, but I agree the firmware settings would probably feel weird for a lot of new DD users.
Yea I have tried Skeijimel’s settings and it just didn’t feel right to me so I ended up back on Brion’s settings from the iracing forums with a little tweak.
One thing that has changed in my settings is that I now run the Notch Filter Off as for the most part it does nothing unless really needed.
Thanks Brion
I will try with the notch off, but if it doesn’t do anything anyway, then I might leave it since the wheel feels fantastic.
PS - I am still planning to put up a video showing the differences between Sebastian’s settings and Brions.
Just had a lot of other life things going on.
1 Like
OK well it does something but not for all cars… basically it is reducing a frequency from the signal, on some cars this might reduce oscillation but on others it can reduce some road feel in that frequency so basically it can be a detriment to some cars… Try it with it off, you may notice no difference, if you don’t like it if it does make a difference you can always put it back.
A new update from me, with some extra info on iracing and ffb settings.
4 Likes
Hey Seb I was warned off irFFB a fair while ago because it causes latency??
I would suggest you try it for yourself. There are some that can notice the added latency and some that do not. I have been using it for a few weeks now and my lap times have gotten faster and I have not noticed any added latency.
I am really looking forward to Mika releasing the source code repository and adding the irFFB filters to Simucube 
1 Like
It depends on your sensitivity, Try it and if you don’t like it then you can always turn it off… It will of course be better if/when integration happens…
1 Like
Or even better when iRacing updates their game engine! They can record telemetry at 360hz but unsure as to why they can’t do the same with FFB?
I’m sure there’s a reason!
Sebastian,
I tried iRFFB a few times but really can’t feel much difference at all, and if there’s latency then is it worth it?
Maybe I need to try it again with these new settings of yours.
Appreciate your videos as always.
In talking with David Tucker at iRacing a lot of it has to do with the way everything is interlinked in the systems and according to him it would take a complete re-write of the entire system to allow for higher Hz FFB… As it stands now though we have irFFB which if you use 360Hz (don’t forget to enable 360Hz in the app.ini (If I remember you had to do that) should output the 360Hz telemetry to the wheel… We also have the Reconstruction filter which is designed to take any incoming signal and interpolate it and try to predict it’s peaks to smooth the signal with little to no degradation of the original signal rather than just a straight smoothing filter which eliminates peaks and valleys in the signal. During development a 60Hz signal was used as a baseline and has made its way into the SimuCUBE firmware as Recon 5, numbers above and below this are either less aggressive or more aggressive algorithms. So basically if you are using the Recon filter the benefits of irFFB may not be nearly as easy to feel.
Thanks Brion!
I don’t think I ever changed the ini file in iRacing when I previously tried irffb. And I certainly didn’t turn the reconstruction filter off!
So basically I have yet to experience irffb?
I will try this out tomorrow. Really interested to feel what others have raved about.
Thanks.
Honestly you might not get much difference, I used to run irFFB but I never used any of the telemetry add-ins so when the Recon filter came along I stopped using it…
My telemetry ini was already 360hz so I guess it’s not something I will bother with now.
And here I was all excited to try out something new this morning!
But I do have a shiny new test version from Mika so not all bad!
Brion, what are your current settings recommendations for 2048-line 21M res SinCOS Small Mige (720W PSU)?
I’m still using the original DRC that I got from Tomo at SimRacingBay (where I purchased the encoder) that was loaded into Granity when I installed the new encoder.
Appreciate any changes you have made (other than disabling the notch filter as you already suggested) that I could try?
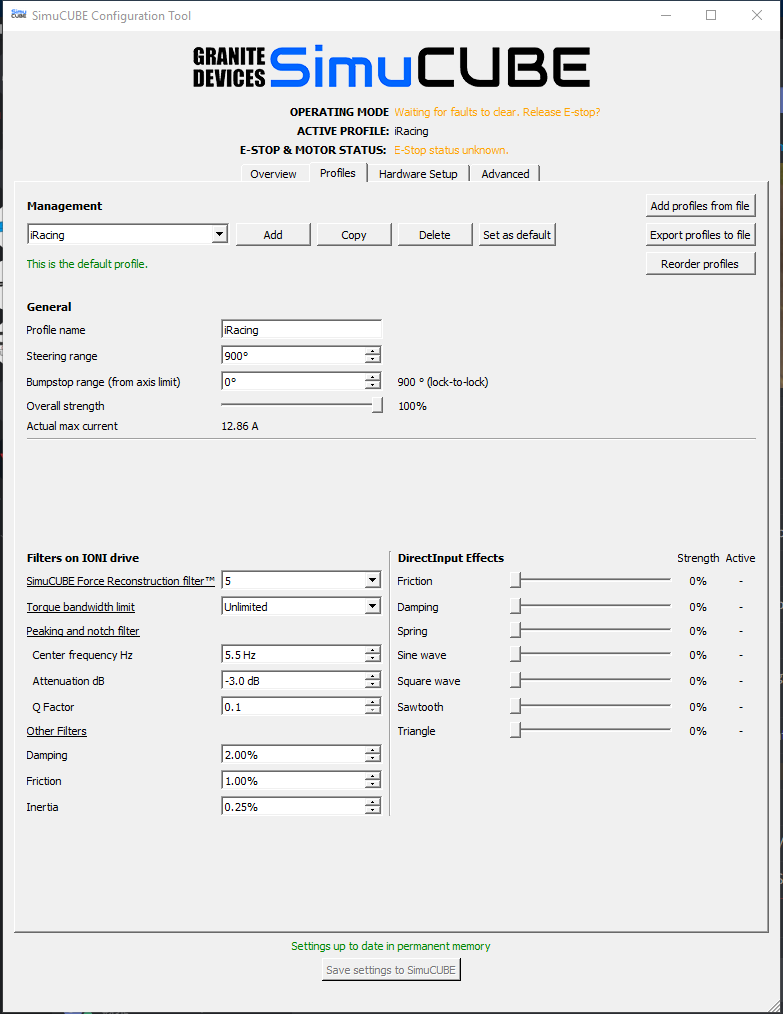
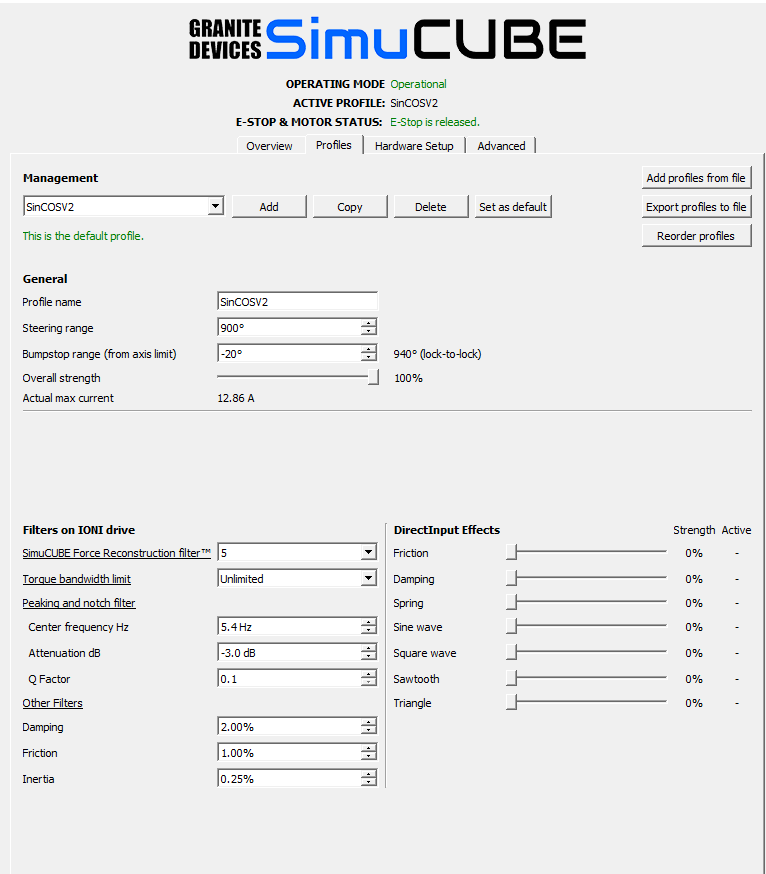
I tried out SKeijmel’s new settings (with some damping added much to my surprise) but still has a ton of oscillations if you even dare to take your hands of the wheel or even loosen your grip! I’ve been racing the new Dallara IR18 a lot, so that car will likely show more oscillation than most, but still with the current settings I am using (image attached), that’s never a problem even with the very strong FFB in that car.
One other thing I wanted to ask you Brion, there’s some who believe it’s better to run the main power slider in Simucube less than 100%, saying it’s less “jerky”.
I’ve always been under the impression that you want the motor to be at full power and then adjust in-game settings (Nm slider in iRacing) to adjust to preferred strenght,
Has this approach changed? Are there any benefits to reducing the FFB directly at the Simucube?
Cheers!
DirectInput effect strenght scales for ConstantForce effect, as used by iRacing, has a scale of -10000 … +10000. If you reduce forces in game, you reduce the fidelity, i.e. you are only using -5000 … 5000 scale, for example. Which compresses the dynamic range,and decreases fidelity.
Its debatable when you would start to see degraded quality of the feedback signal because of this, but you would, at some point.
ok, so it would be better to run iRacing slider at 20nm and then adjust the main Simucube slider to a level that’s drive-able for more than a few laps?