Hi all, Just found a problem testing on Richard Burns Rally.
I activated “Hand off detection” at LOW sensitivity since day one. Not any problem doing donnuts and crazy stuff over dirt on iRacing.
Yesterday i was configuring a profile for RichardBurnsRally, Polo WRC on Joux Verte, all going smooth with fast turning, great FFb response, hairpin right, hairpin left, until I put 2 wheels over grass and went to the other side without any control.
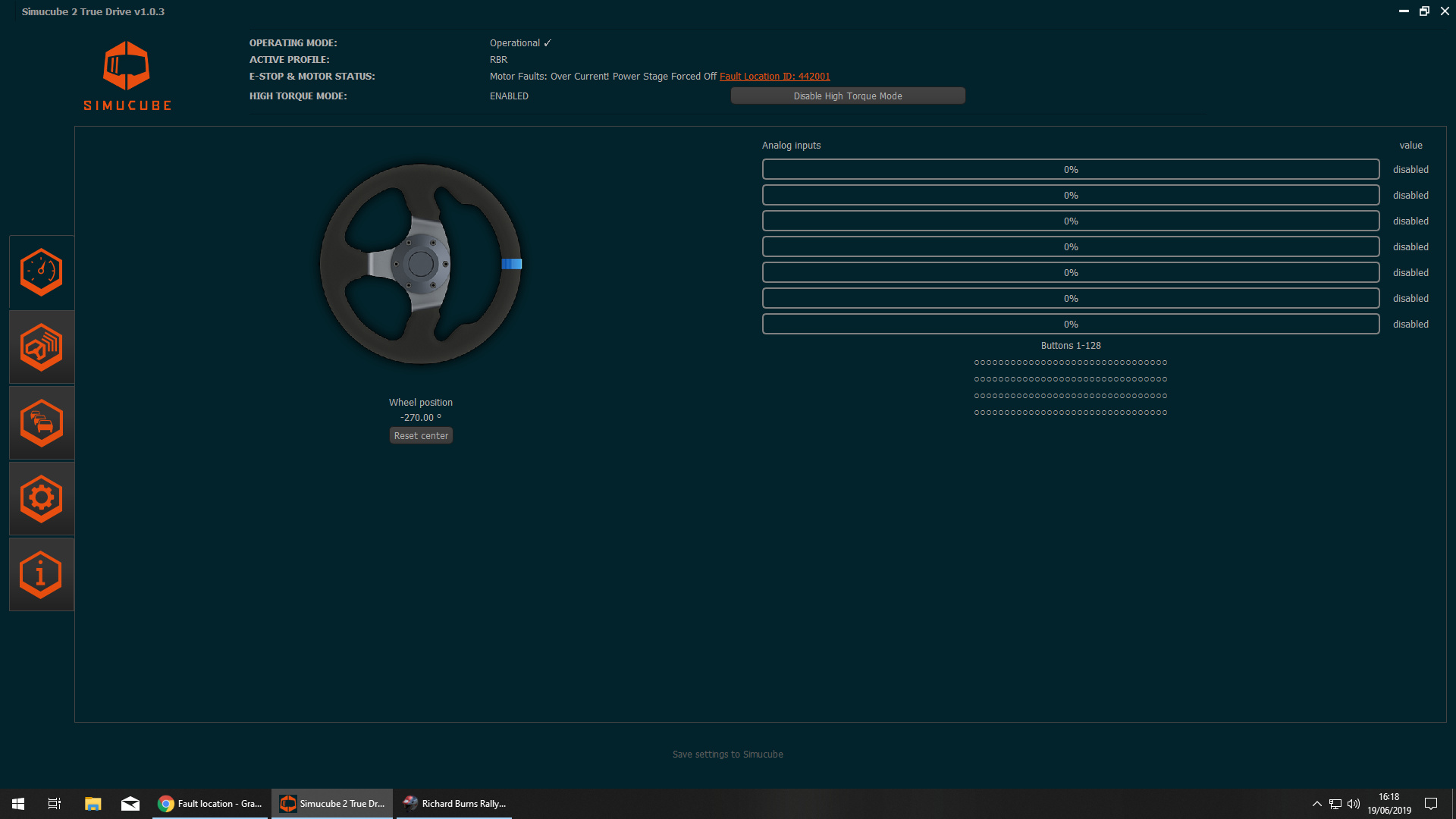
I just let the rim go and after 2 complete turns (bumpstop to bumstop) I think that Hands off Detection was triggered because the wheel turns off power automaticaly showing a fault code on TrueDrive. No beeps no sound.
Today the same thing happened and I have captured screens with fault code.
Just like yesterday, wheel entering into oscillations (bumpstop to bumpstop), I think Hands Off Detection triggered (no sound, no beeps) an Fault code on TD. Wheel out of range is the issue but returning into FFb range is very dangerous because car ingame has the wheel full lock to any side.
I’m investigating the issue. It’s likely that hands-off detection was not triggered, but that fault 442001 was triggered first. However, it’s important to get to the root cause what made the wheel oscillate.
Do you feel like game was causing the oscillation, or do you think Simucube went crazy?
I remember I’ve got same fault in development but that was only when wheel was turned beyond a hard coded 4 turns limit. @Alfye20 do you think wheel was rotating at least 4 turns (not just 2) beyond center point when the fault happened? Then we would know it’s the same cause and we can focus on making the right fix
I can replicate it on RichardBurnsRally options-test forcefeedback.
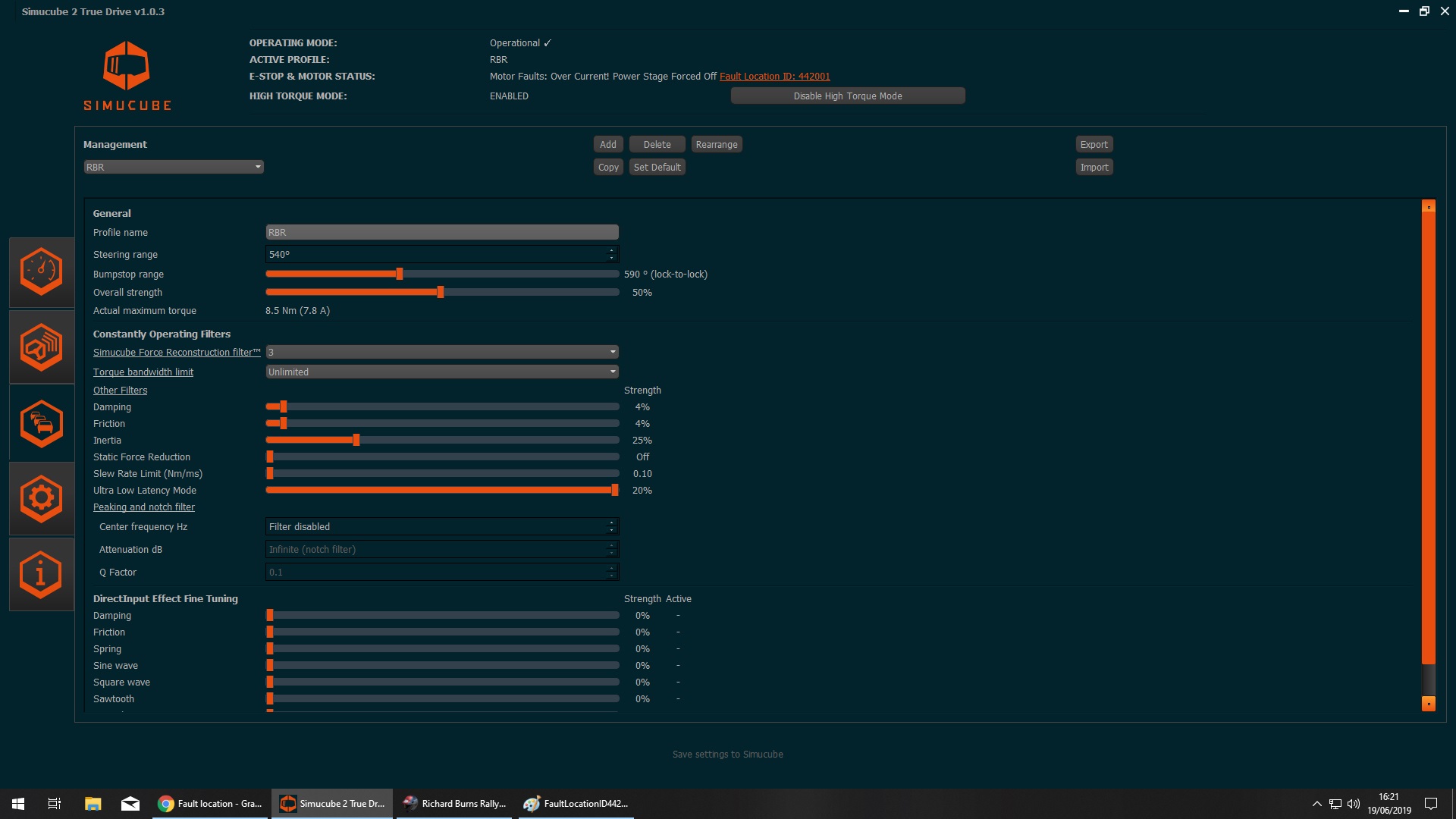
When ´bumpstop maximun strength´ is too low, when reaching bumpstop, servo will stop sending forces and wheel continues rotating by inertias, overshooting wheel range.
When ¨bumpstop maximun strength´ is too high, reaching bumpston will charge a “super kick” and send the rim backwards the double the force before, bouncing until the servo stop power, rim continues rotating by inertias and overshoot wheel range by more than 4 complete turns.
In both cases, returning the rim to its “real center” position do the trick but its very dangerous because forces is reactivated dont know when or where.
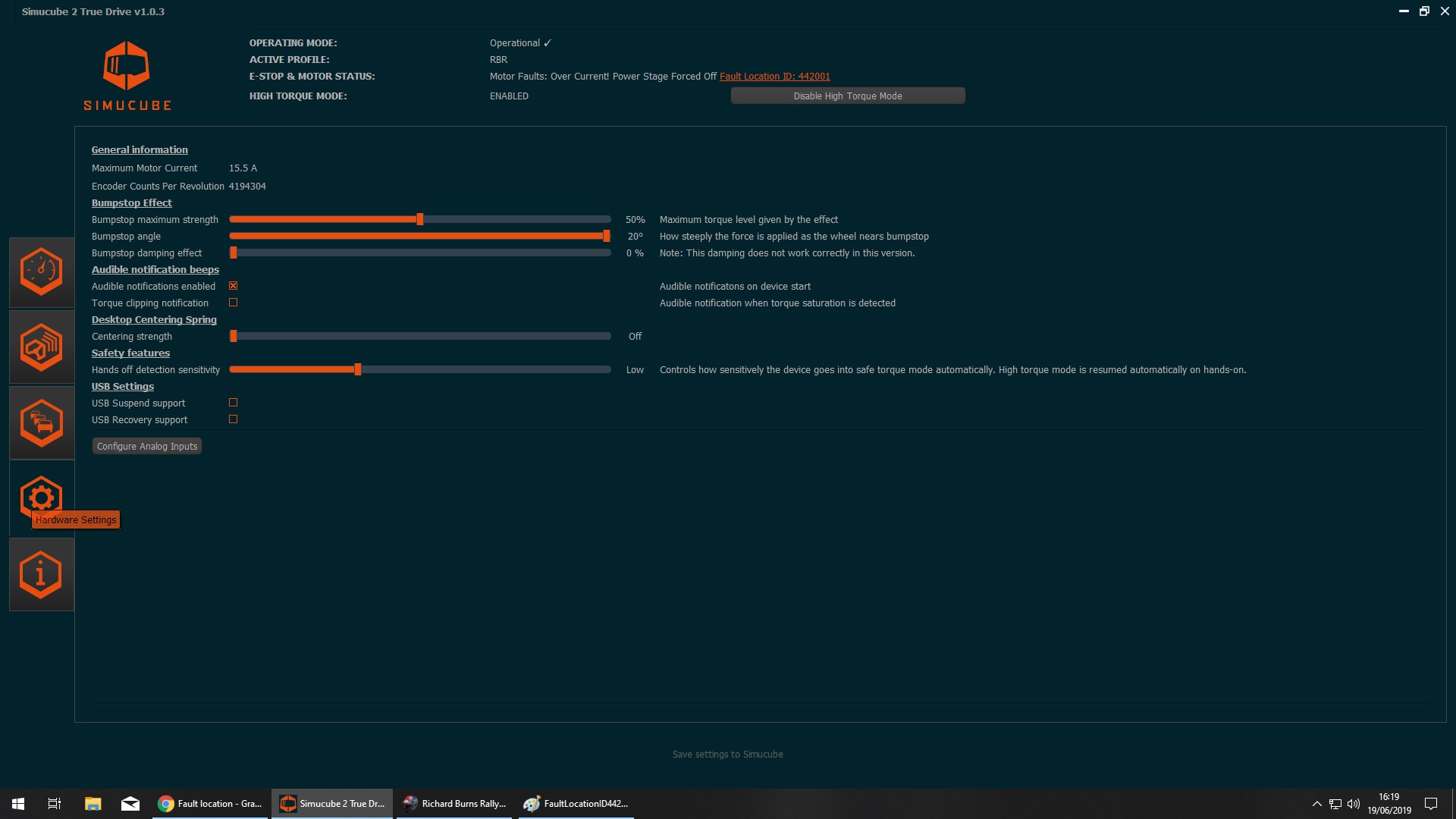
I am testing ´bumpstom damping effect´ and I think is the way to go but causes weird nioses reaching the limits, it is OK-SAFE to use this effect until new firmware arrives?
Does this problem also happen when playing the simulator - the RBR test clearly expects the wheels to have mechanical bumpstops that cannot be overcome by any means, which is not true for DD wheels.
The servo drive will go to safe mode when it is rotated over 4 turns over the initial position at powerup and the forces will automatically return when reaching the center. Also Simucube will disable forces when the wheel has rotated drasticly over the bumpstop. These all explain this behavior.
Bumbstop damping effect has a mention that it does not work properly in the currently released firmware version - both on the download page and next to the slider. Trying to use it will cause problems.
Yes, it does. Is like you said that RBR doesnt simulates Bumpstop forces so fine tuning TrueDrive options was mandatory.
I tested Bumpstop Damping only for those videos, no more because SC2 made weird noises. But, what kind of problems might we expect using it right now, with actual firmware?
I think anything that can cause potential “problems” must be hidden, If not it is available for “beta” support…
Back to the topic, dont Know if its possible to create bumpstop forces bigger than Overall Forces on TD or by Firmware changes, because max force is equal to Bumpstop force on many sim tittles
This problem with the bumbstop damping appeared right before the official release, so we didn’t have time to hide it. It will be fixed soon.
Not possible, as the strength slider controls the servo drive amperage level too. Switching this around (it actually was that way very early in Simucube 1 firmware development) results in less fidelity to FFB.