I did grab that one, I just got it delivered 10 minutes ago. It’s smaller than I thought, it has a 95mm hole spacing instead of the mige 110mm. Can’t wait to start messing around. Did you hook up the 52K with the 2048 encoder? How does it feel with that resolution?
Thank you for the drawing. I ordered a Biss-C from Lisa, so thats probably a week out. I wouldnt mind checking out the STL file, if you cant upload it here I can send my email. I’m going to try to open it up and remove the encoder this weekend and I’ll post what it looks like.
The 2048 isn’t bad at all - I don’t have much to compare it to, however, as I went from a Logitech G27 to my DIY Simucube 1 AKM52 build. I imagine the fidelity gets better with a higher resolution encoder, and I’ll someday update it - just haven’t e-mailed Lisa to order one yet. But with proper profiles set for iRacing, and custom FFB for Project Cars2 and Automobilista 2 - the Simucube is really a treat; even with the lower rez encoder, the curbing, road texture, steering feedback/etc., are really very impressive and similar to my real world vintage race cars.
It’s not much, I used Tinkercad, YMMV - feel free to use it, or trash it
This coupler on eBay may just work; or, make that STL file a hair larger diameter to 10mm and get a standard 12.7mmx10mm coupler.
I’ve heard horror stories on getting the AKM’s apart, Sam may mention in his thread a disassembly method. I understand heat application, and good tight fitting allen keys are necessary.
Thanks for the STL. You can wait till I do the experiment if you want haha, I might build an encoder cable and just use it with the 2k encoder until my biss-c comes in. But my simucube/iono hc havent shipped yet for some reason.
Posting an update since I received the parts and had my friend help me make a couple of things. Big shoutout to Brion Sohn and Joe Sullivan for all the help answering my questions.
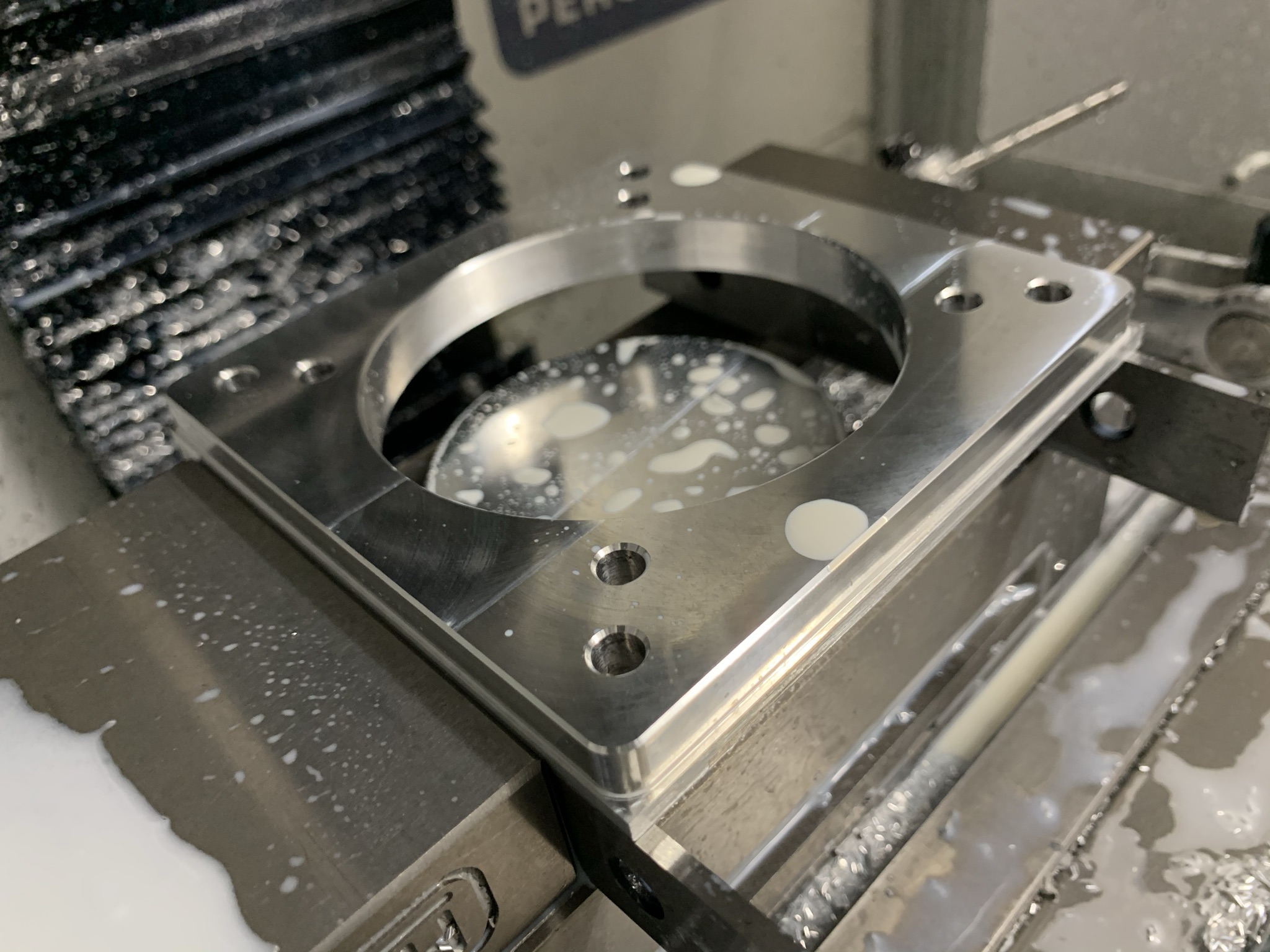
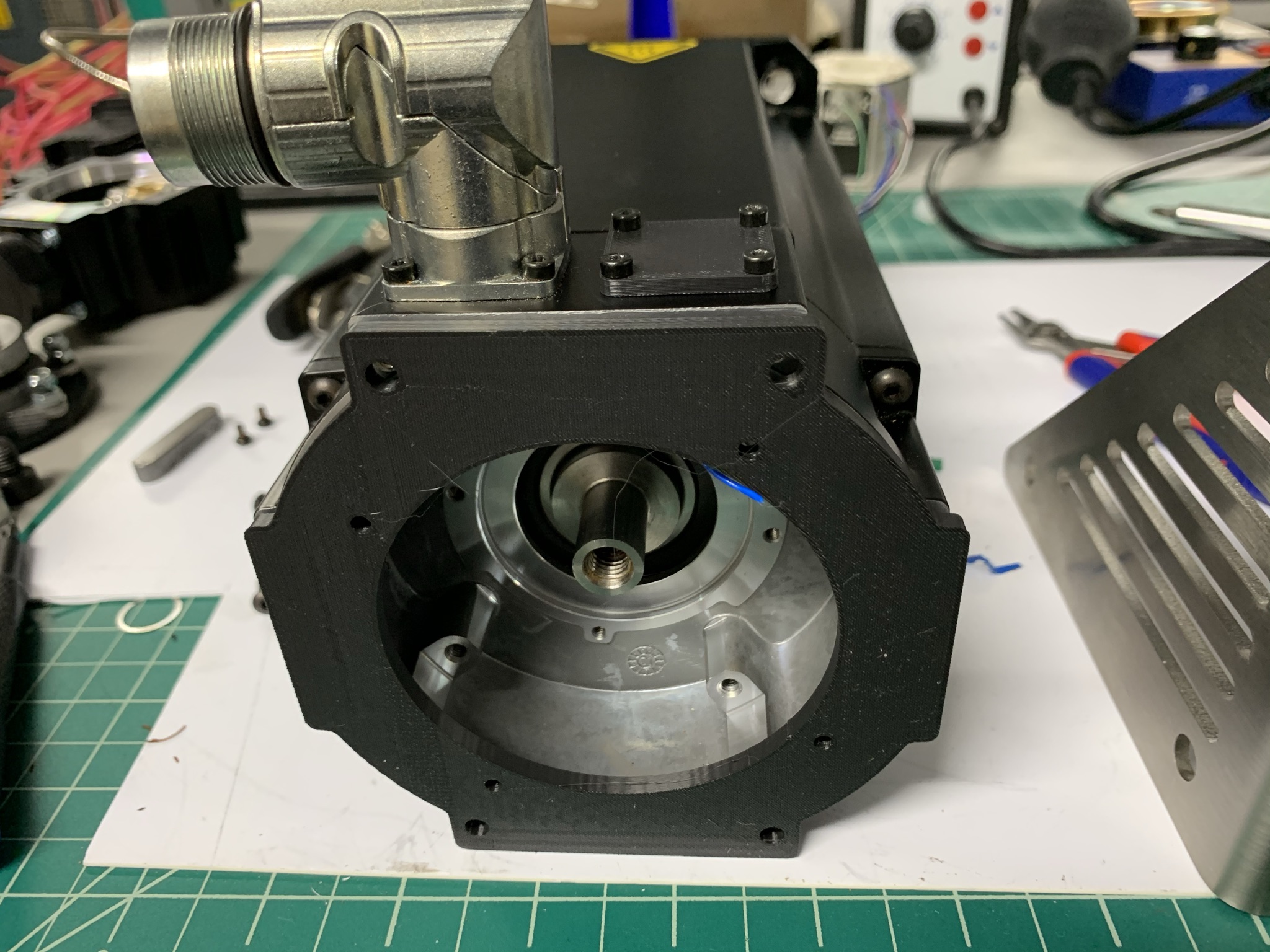
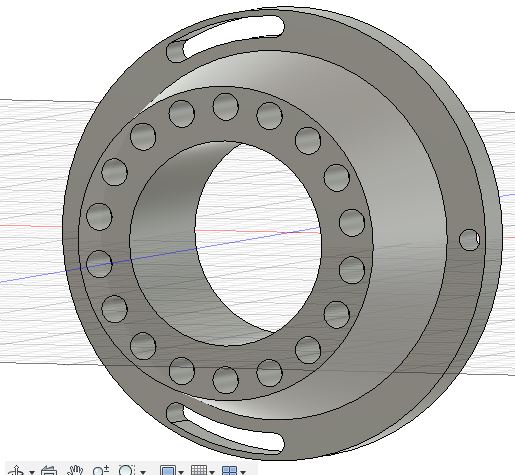
First I had to make an adapter mounting plate since my hole pattern is non-standard, so we CNCed an aluminum plate with threading holes to adapt to an augury mige mount.
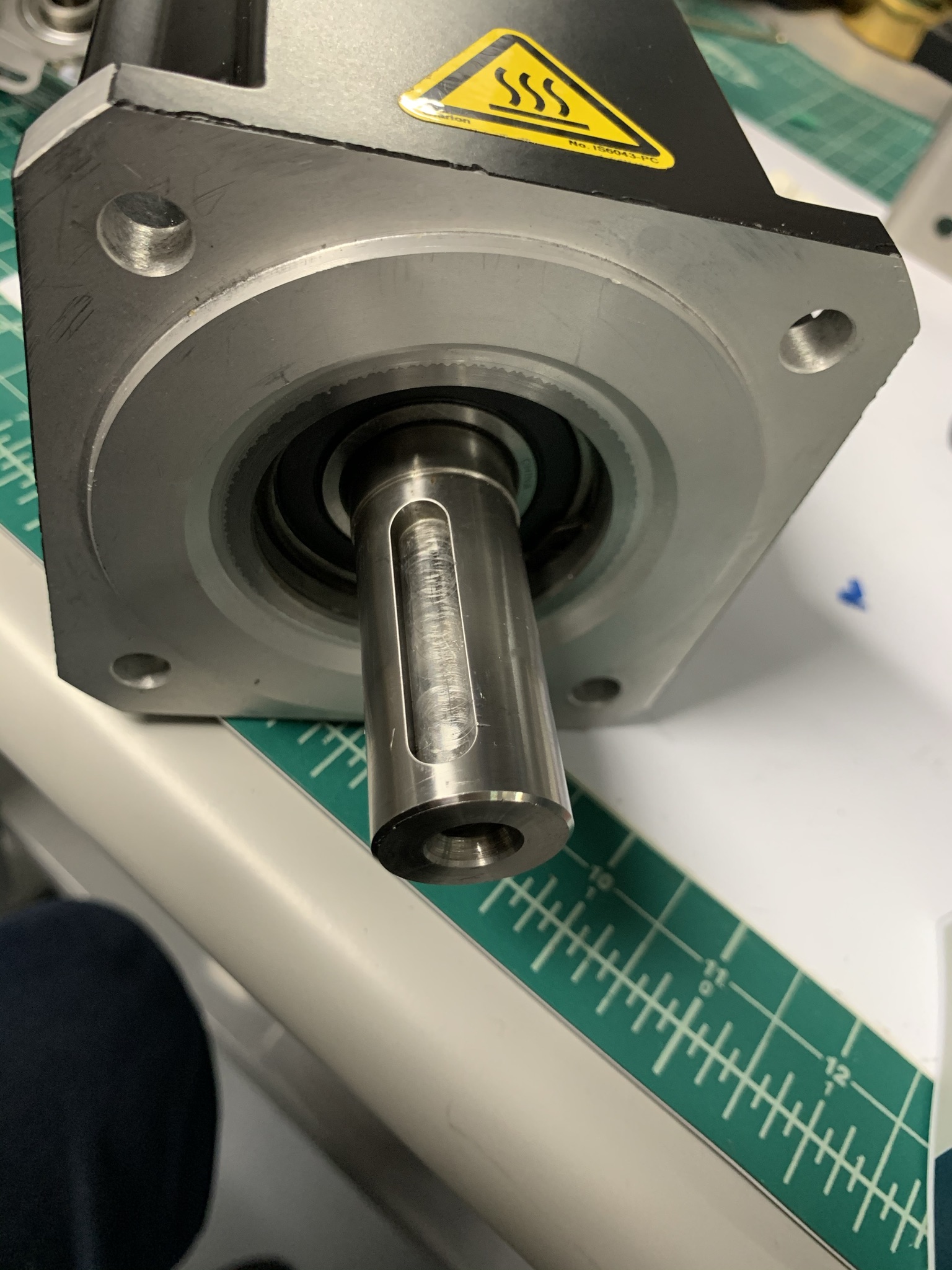
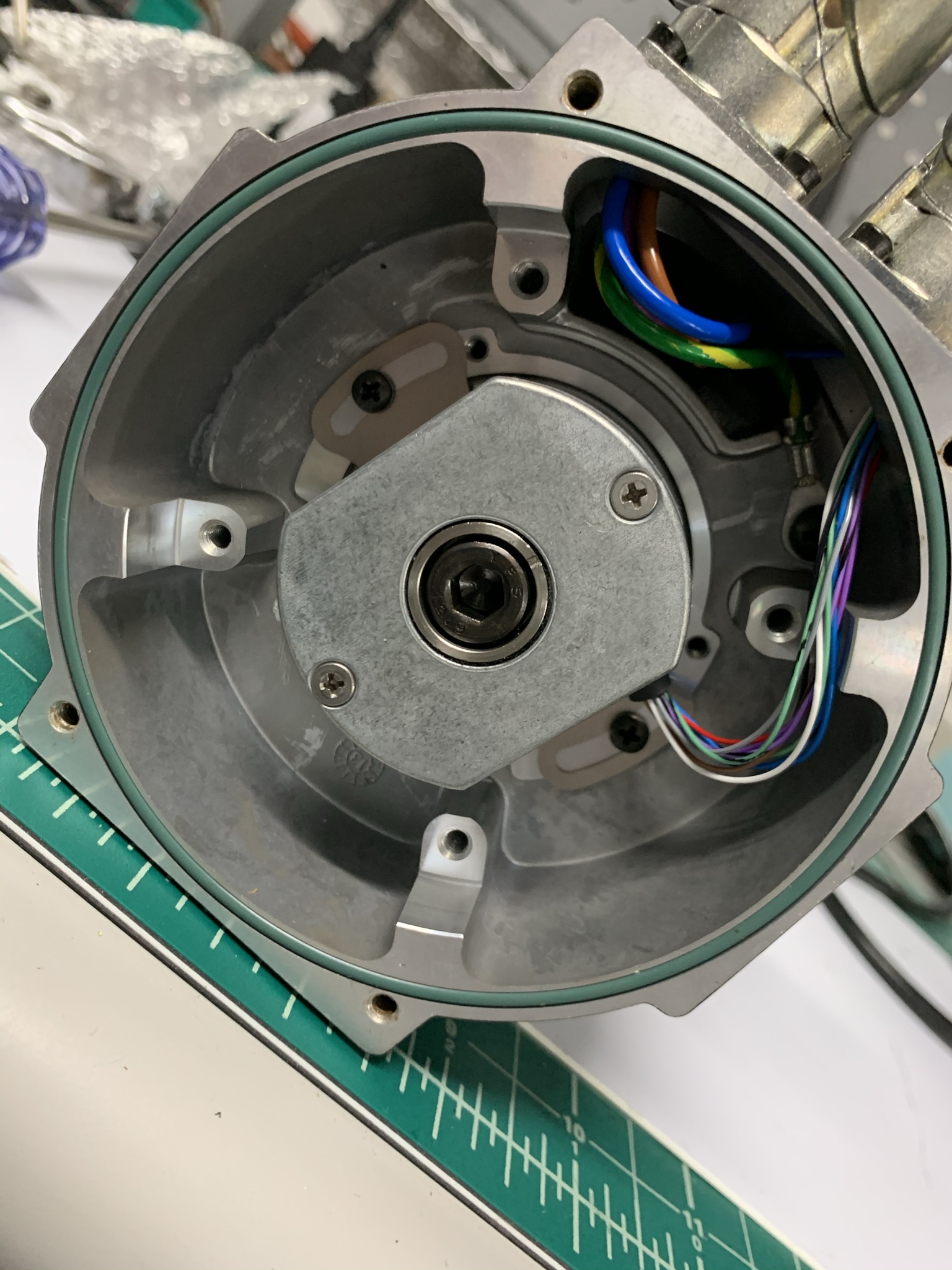
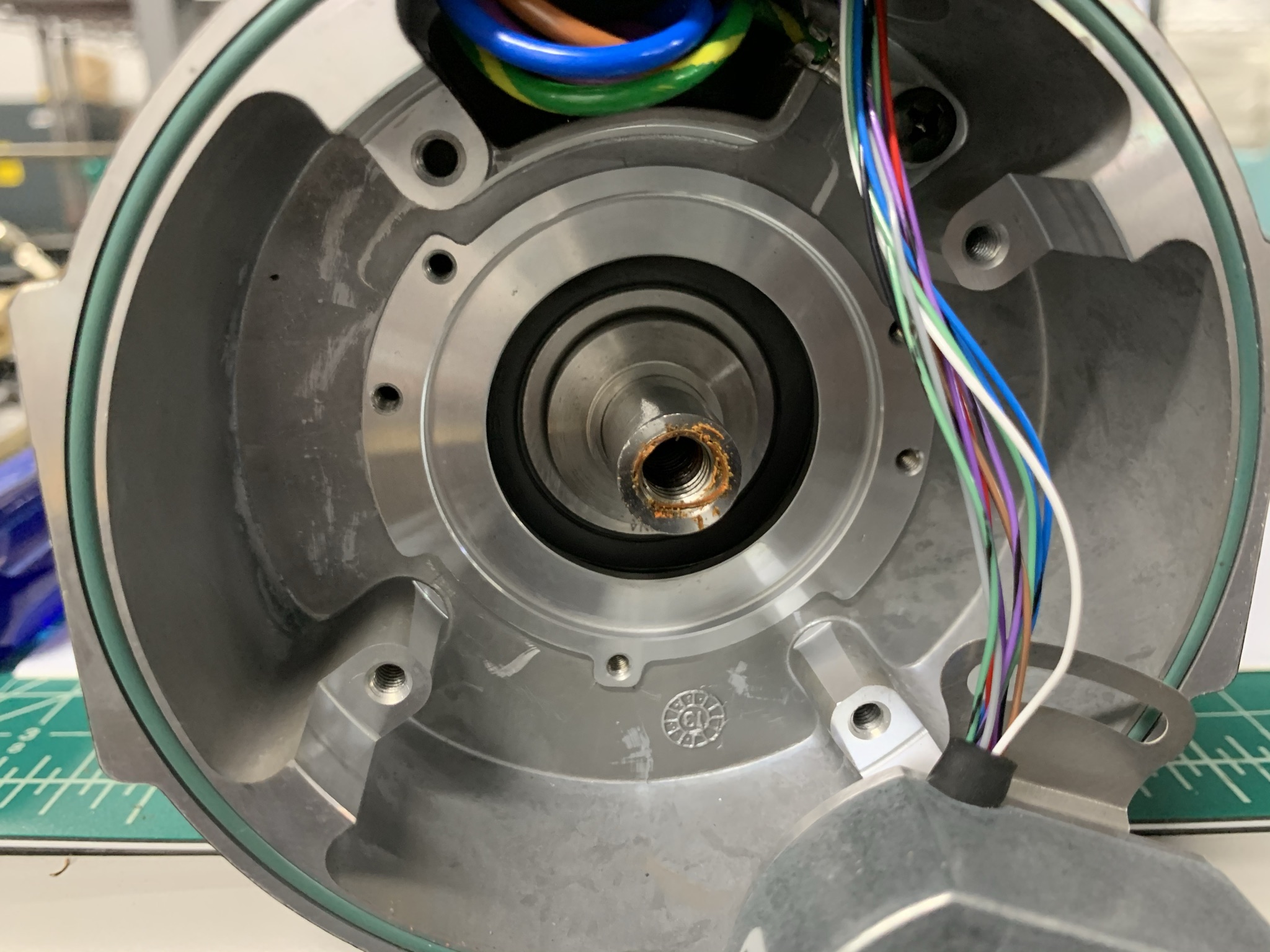
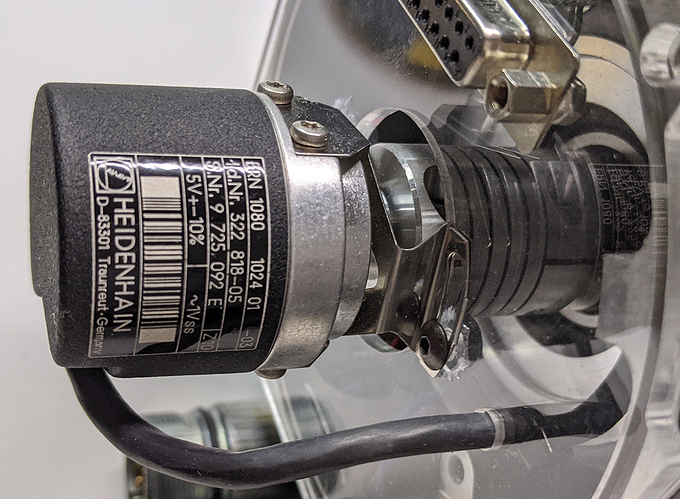
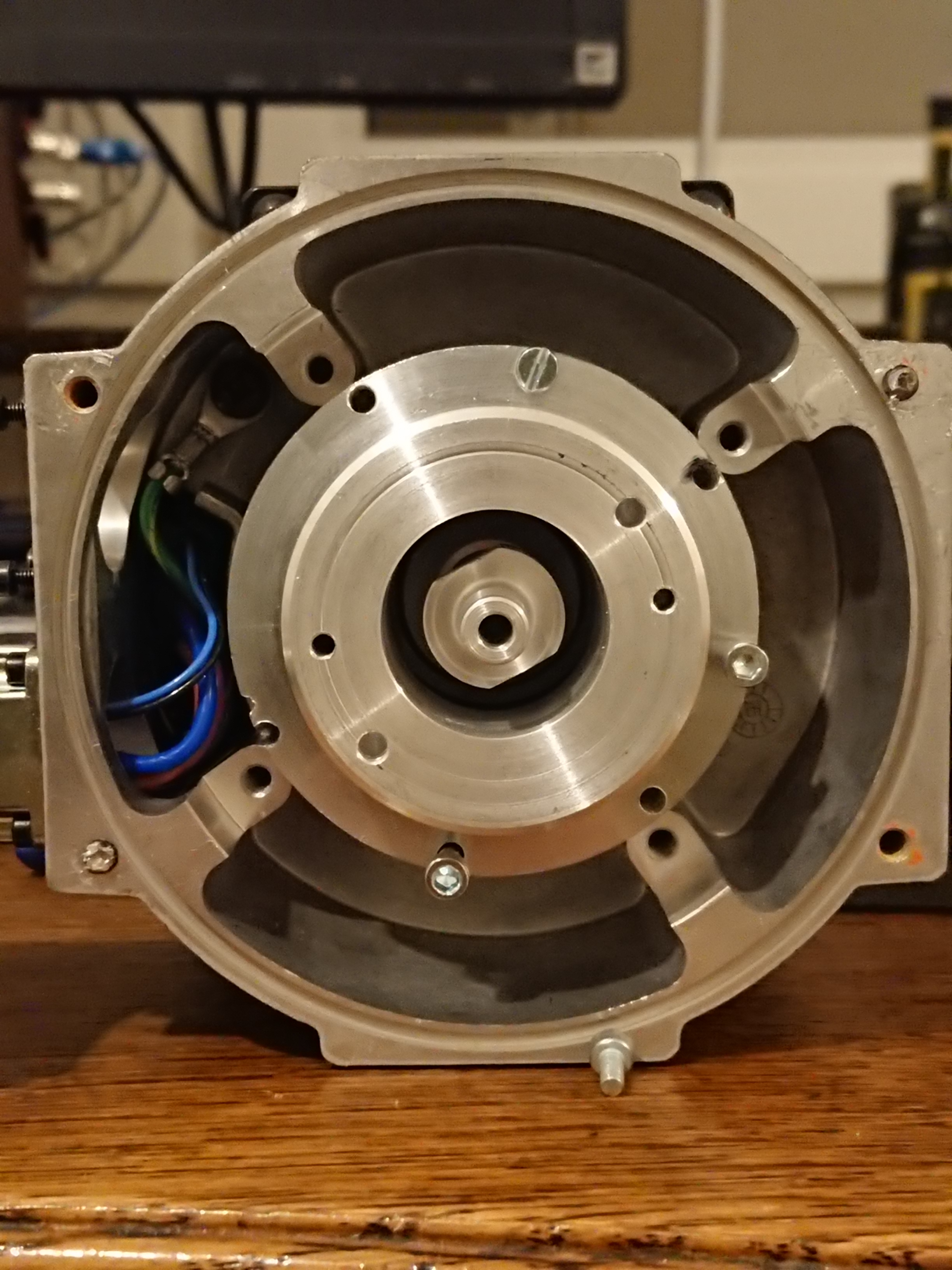
Then we took apart the encoder. Has to use heat on the bolts on the backplate since they had threadlocker. Then the encoder came off pretty easy, just had to loosen the m8 bolt and take off the mounting screws and it came right off.
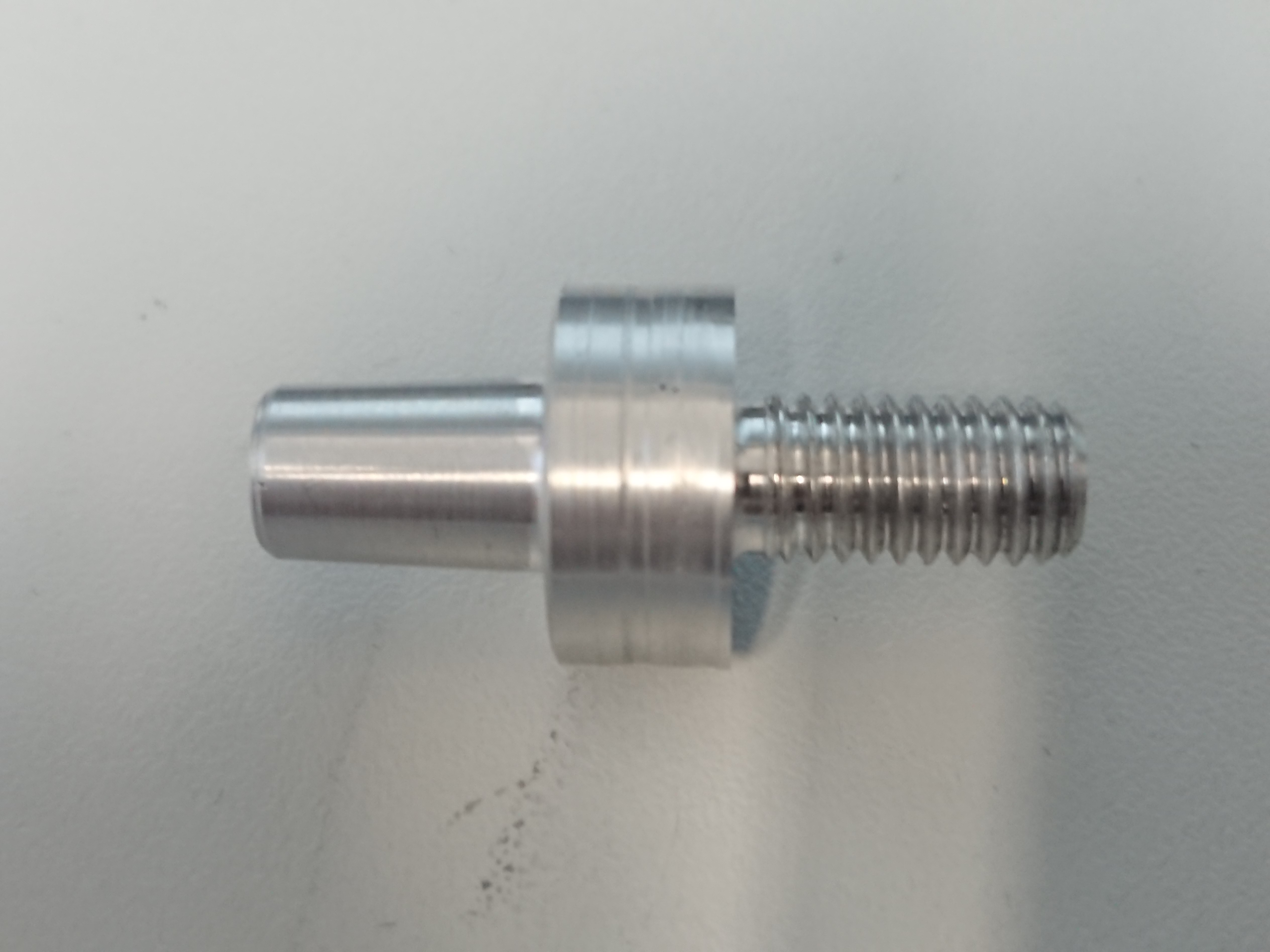
Then we 3d printed the adapter shaft/coupler in one piece to test fitment. The encoder shaft on the AKM is half inch, the biss-c is 9mm with a 1/10 taper, meaning for every 10mm of length the diameter goes down by 1mm. the tapered portion is 13.5mm long, so it goes from 9mm diameter to 7.65mm diameter. The coupler portion had holes for 2 set screws. I will upload the cad file when I get it its on my friends computer.
Awesome!! Fitment of the Biss isn’t too terrible then - if you wouldn’t mind sharing the STL files for the adapter and housing I would greatly appreciate it. I’ll tuck them away until I get up the gumption to crack open my AKM.
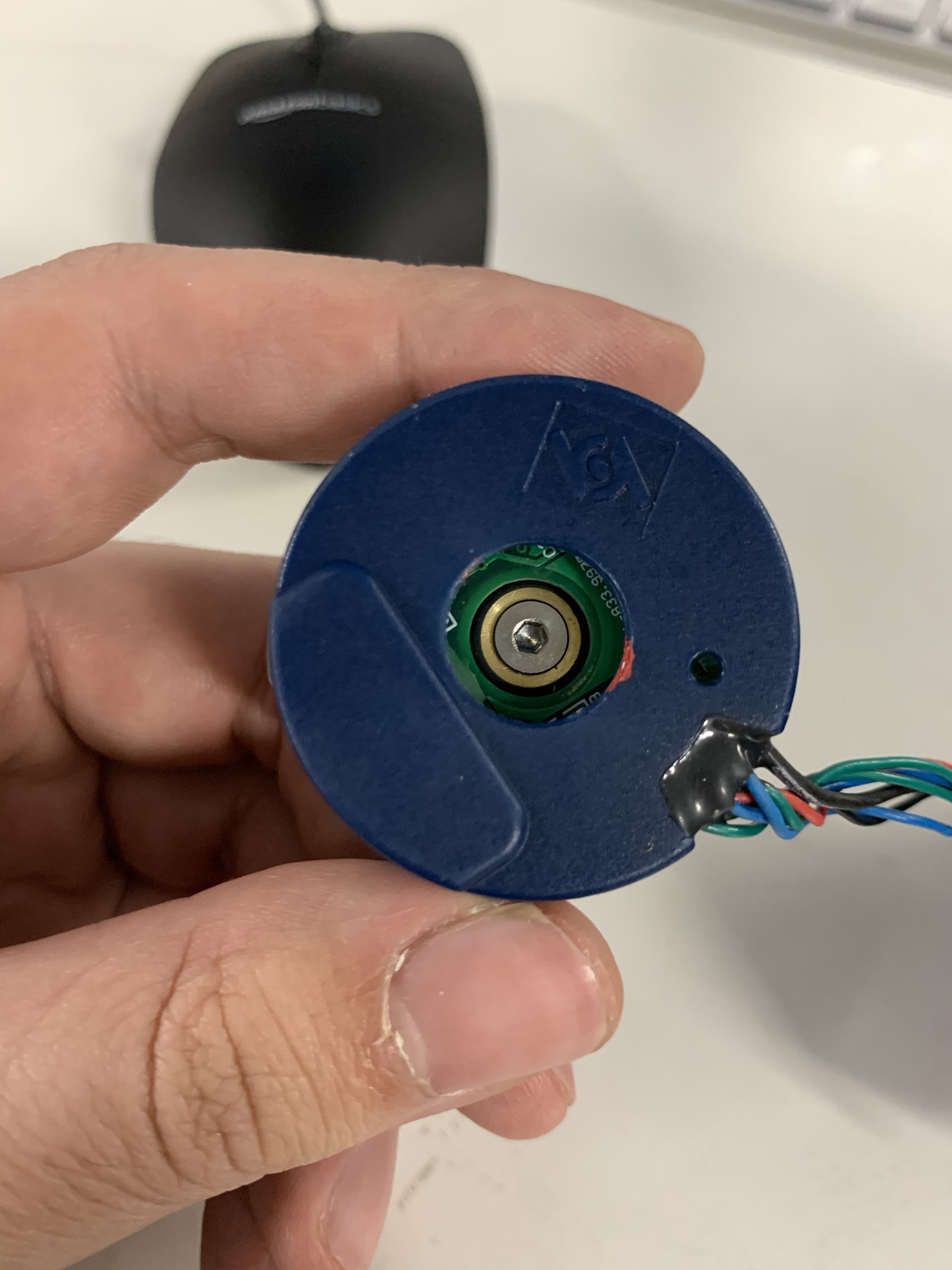
Curious what encoder came out of it, guessing probably a 2048ppr Accu-Coder?
it is a bit smaller than other servos. So the backplate design for example that was linked in the thread you gave me didnt fit and we had to redo it.
The 3d printed shaft should work though. I haven’t put it through it’s paces but after tightening it down with the set screws it seems fine. We also printed a spacer to mount the biss-c onto the mounting holes on the back of the AKM, it doesnt bolt directly the the backplate. I actually bought the 9.5mm to 12.7mm coupler from ebay that you linked and we will be machining the tapered shaft from metal to use with that. I will post all the files here when I have them.
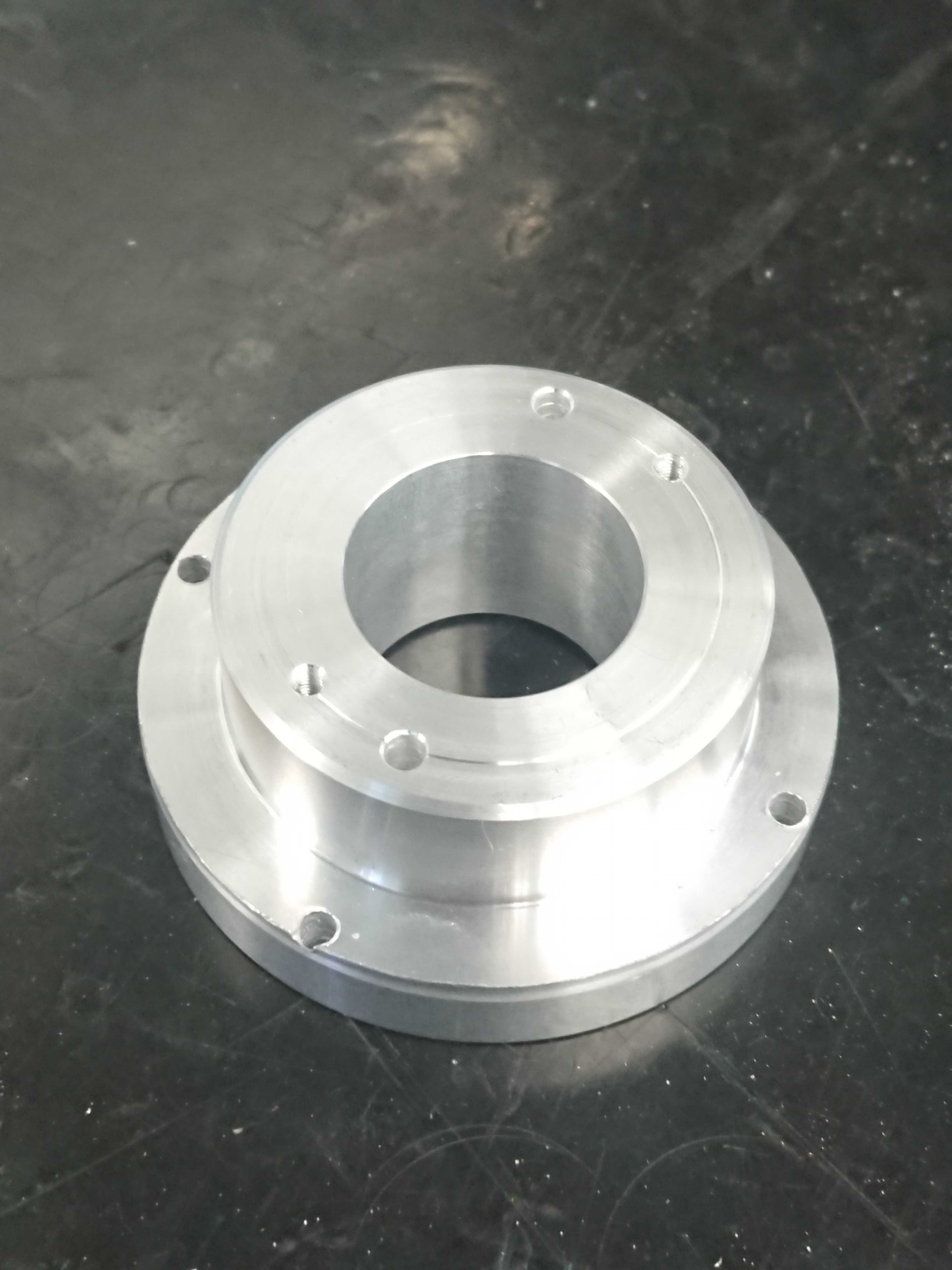
Machined the shaft out of aluminum this past weekend, perfect fit. We made it a tiny bit shorter than the specified 13.5mm on the drawing, made the fit a little better.
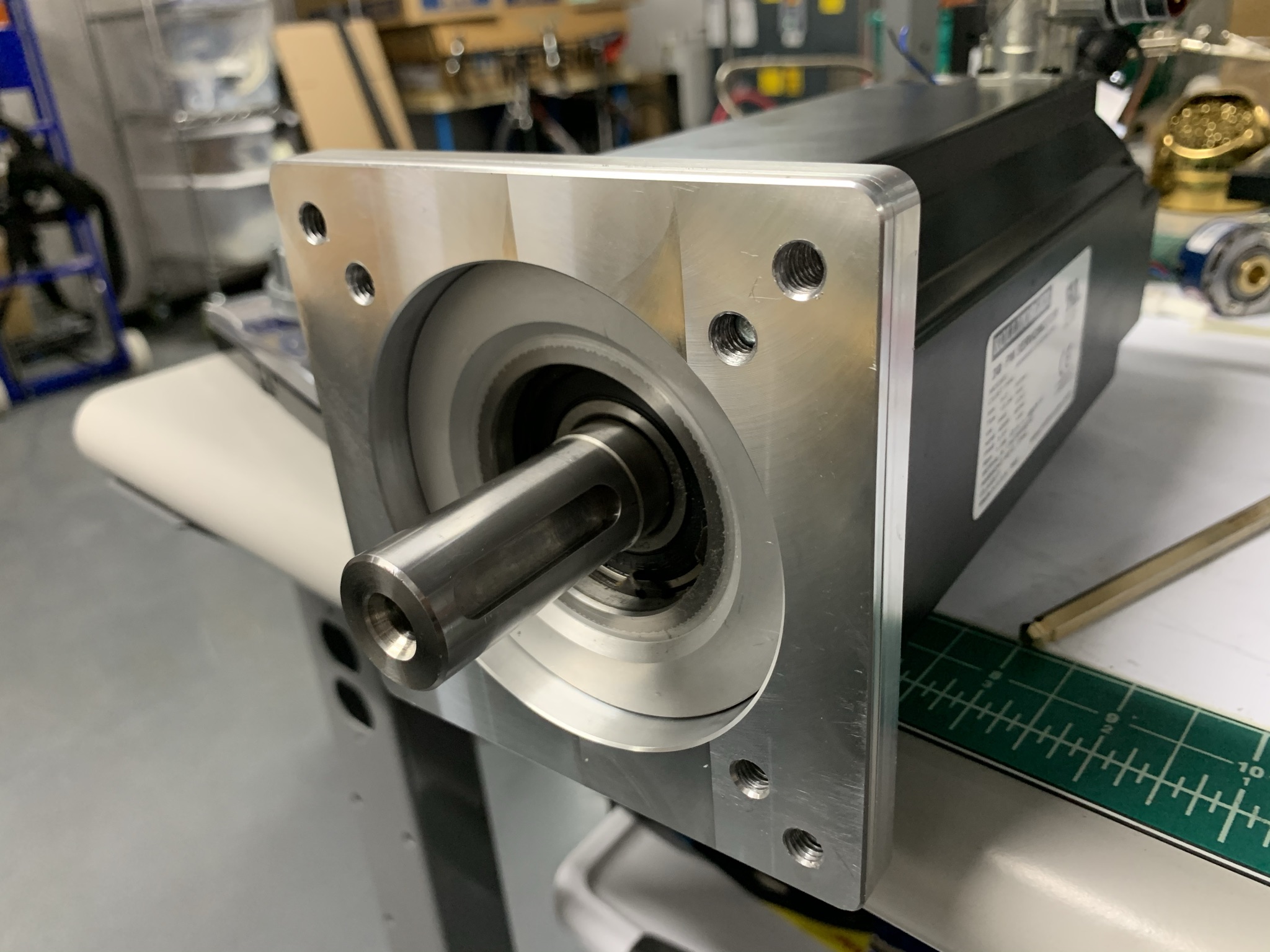
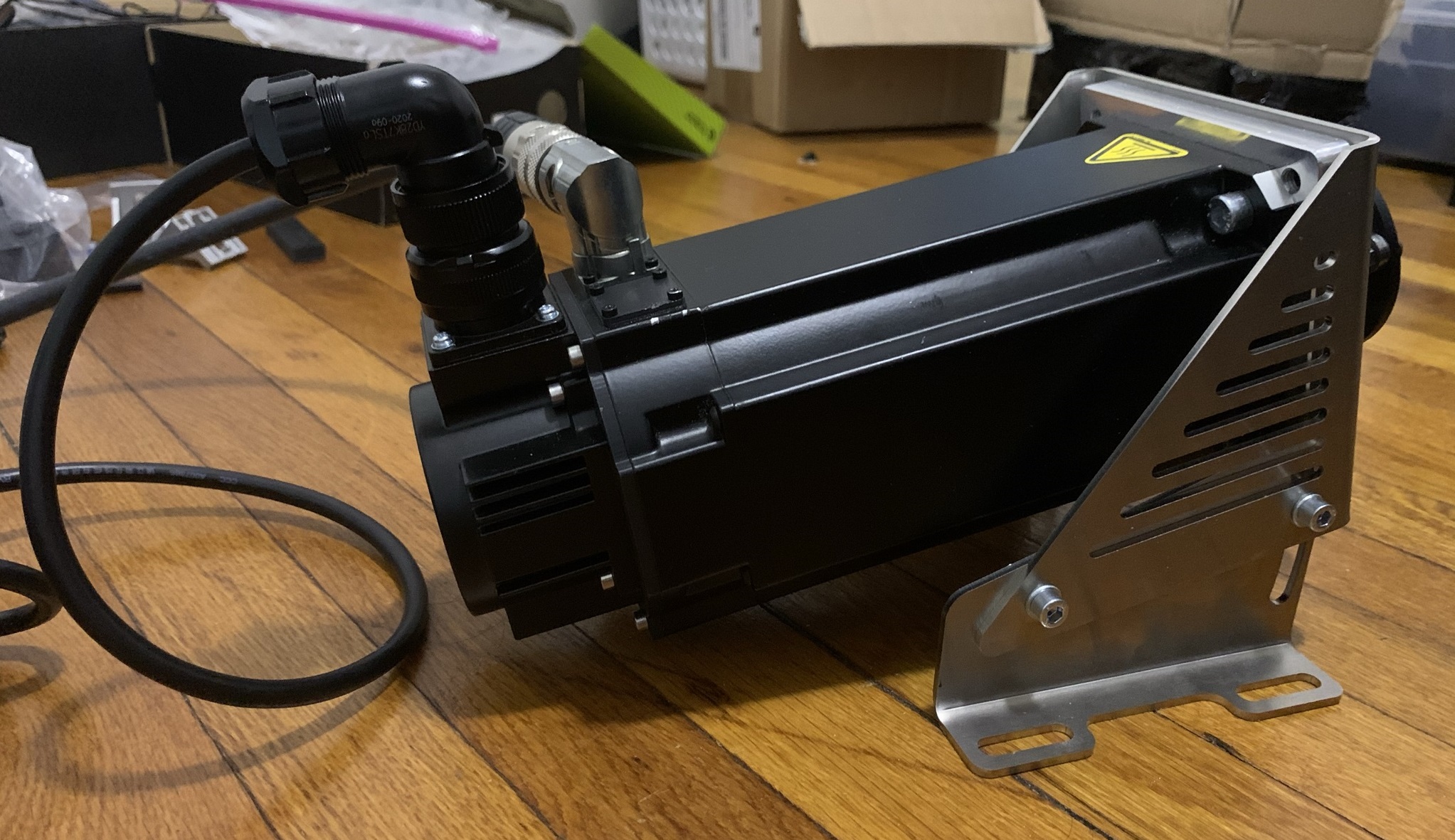
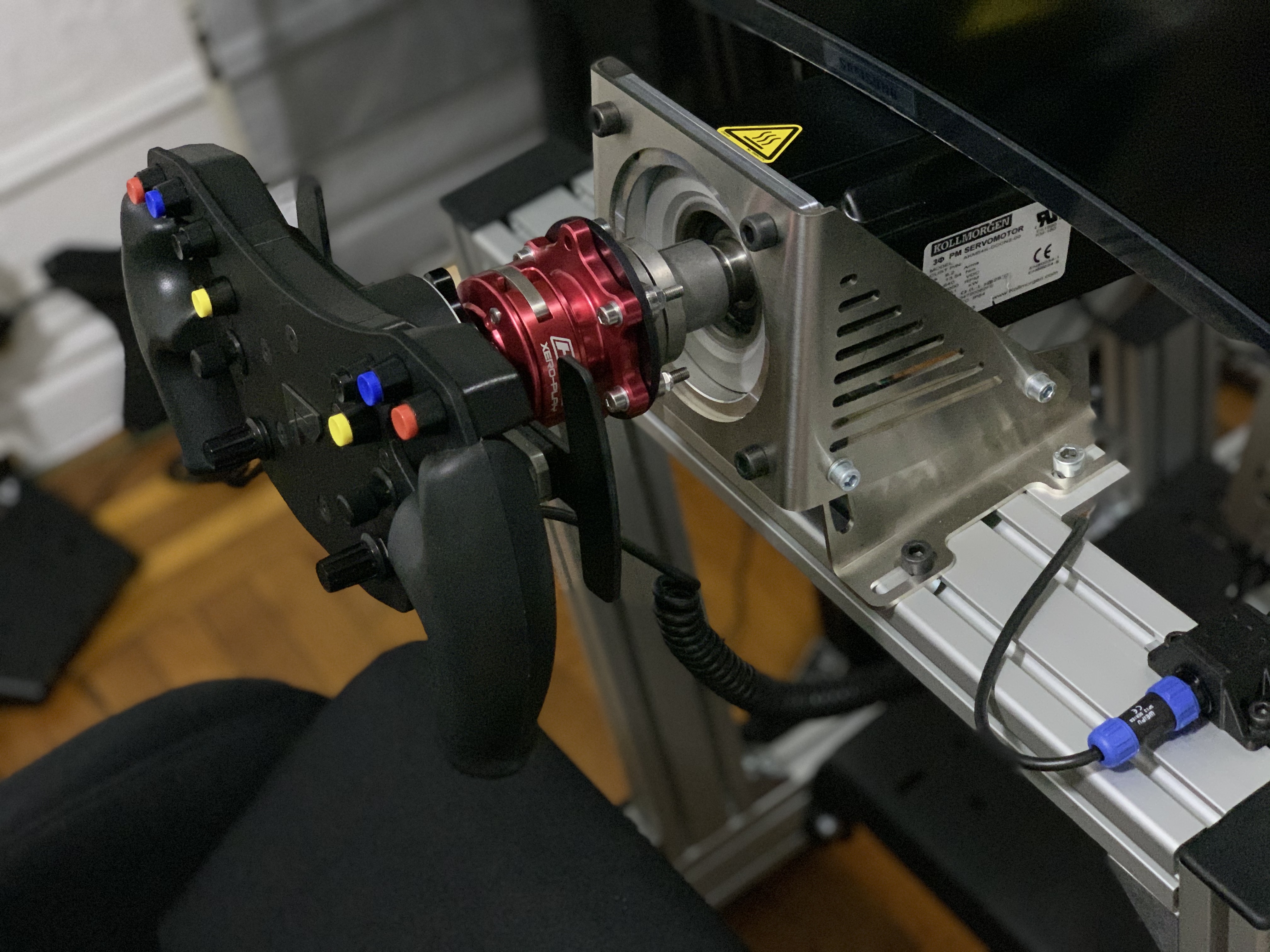
And just a glamour shot of the motor mounted up on the rig, xero play QR from HRS (ignore the missing bolt I was just testing fitment when I took the pic)
I had to print an 11mm spacer to accommodate the coupler since it is longer than the first part we made. I will post all the final CAD files sometime this week
Thank you Mika for the recognition.
I am always pleased that you (personally and the whole team) have created this great system and, above all, that you continue to develop it.
I can allready feel the much lower inertia of my AKM53G compared to the Mige, what is great!
But I also feel the cogging torque.
Since this is a uniformly repeating ripple, I wonder if you can’t compensate for it in SW.
You would “only” need 3 parameters to compensate it with an added torque vector:
Pole pair number
Amplitude
Phase
Since 3D printing would have taken too long (I don’t have a printer myself), it was milled from aluminium.
Unfortunately, the first holes were not very accurate. But then it worked out well.
The first tests will follow at the weekend. After that, a new cover will be put on the back. But that is not urgent.
This is all excellent stuff! I need to put a Biss encoder on my Christmas list…Really makes me want to upgrade my AKM, good to see everyone innovating.
Might also be good leverage to finally buy a 3D printer…
First impressions of the AKM53G servo compared to the small Mige. Both with SC1 and Biss-C.
Neutral
Other design
About the same amount of torque due to the limitation of my PSU.
PRO
less inertia. Thus more dynamics. Just less low-pass behavior of the FFB.
Helps especially with rapid load changes such as countersteering in sudden oversteer events.
CON
ignificantly higher cogging torque. Noticed less at high loads (like fast curve). If little FFB level is present it is more pronounced, for example when driving slowly and steering around the zero steering angle on the straight.
More noise (high frequency beeping) due to the actuation (even in standby).
I hope that I can still artificially compensate for the cogging by tweeking the firmware. Then it would be really great!