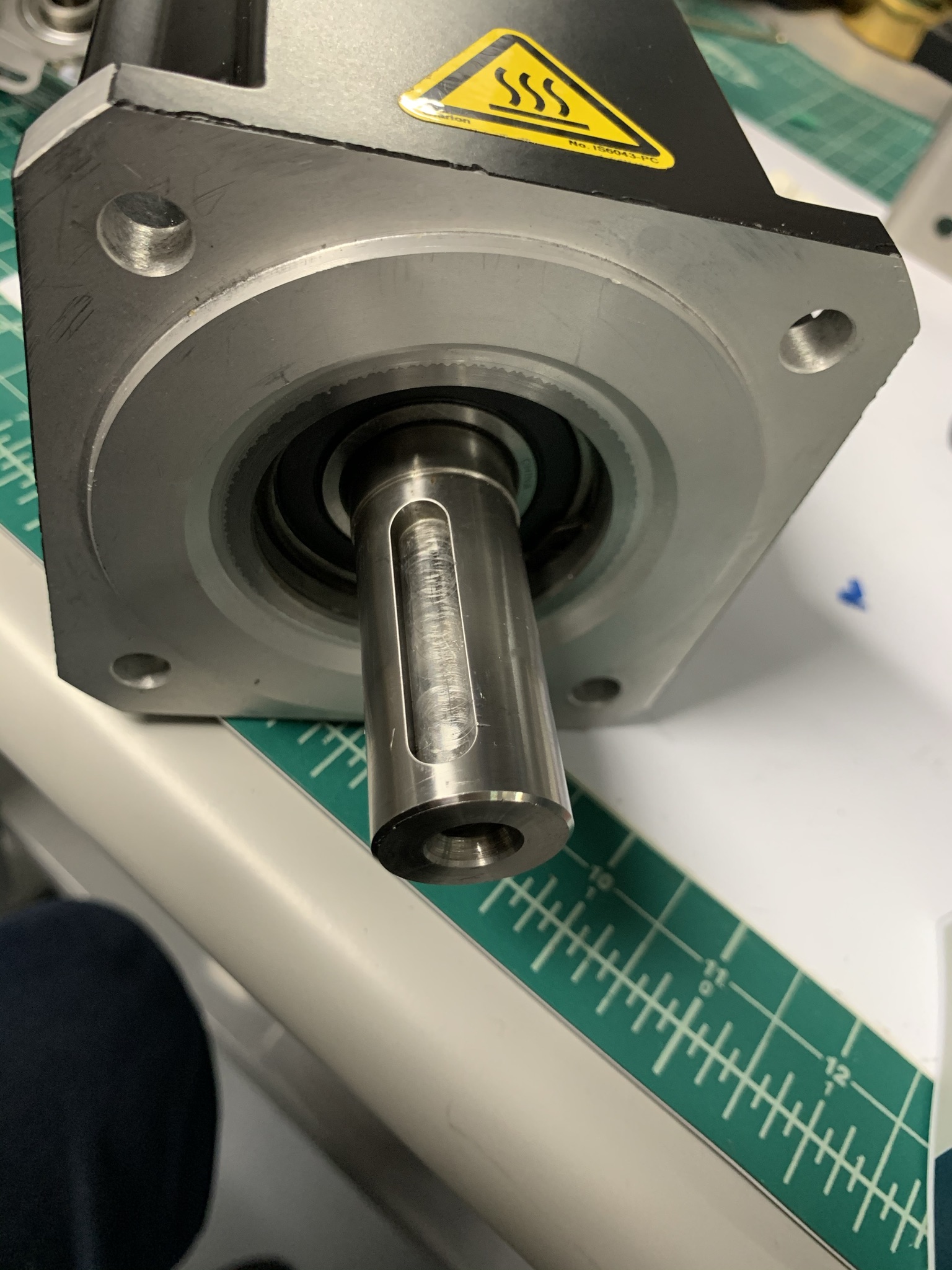
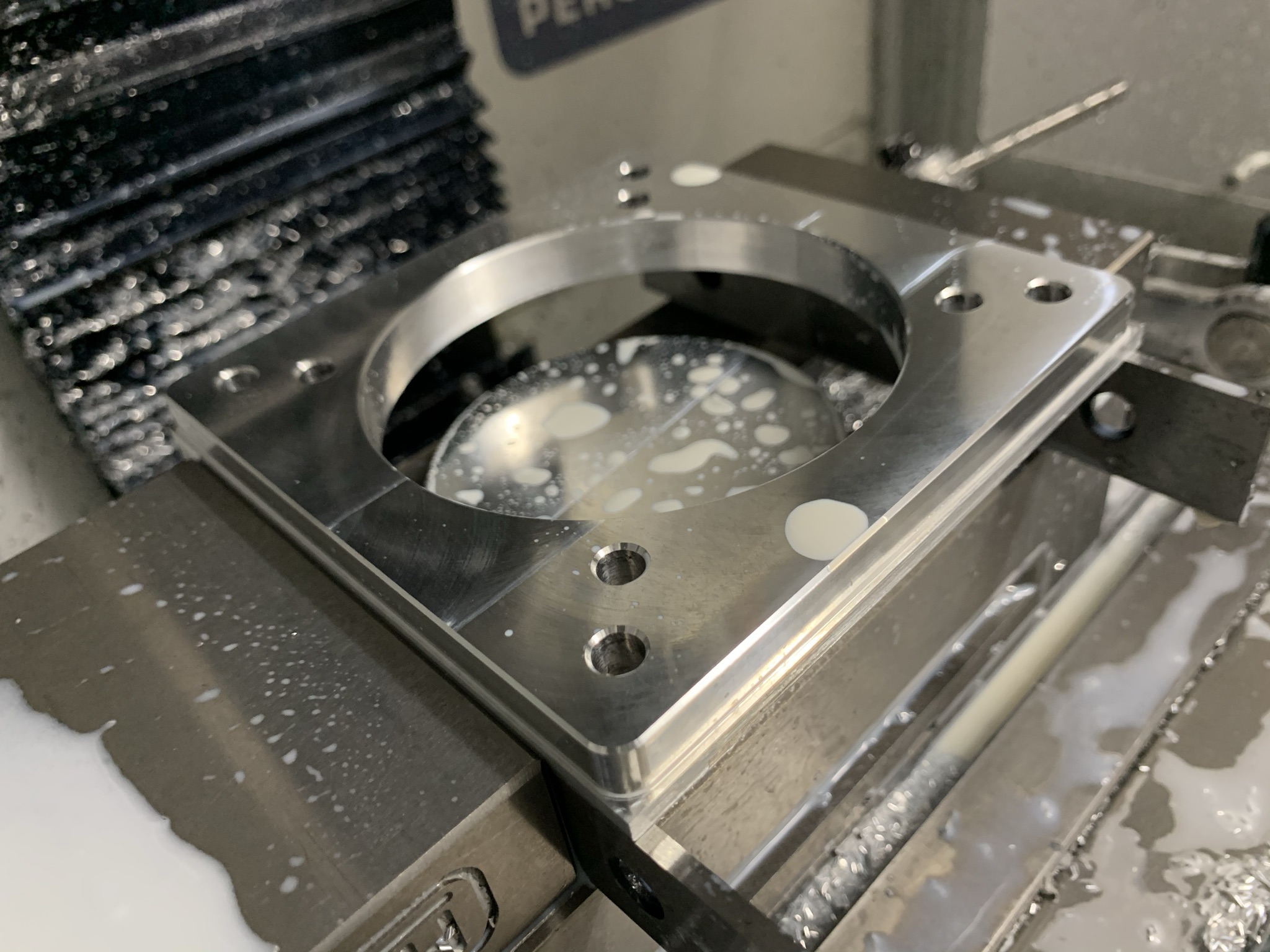
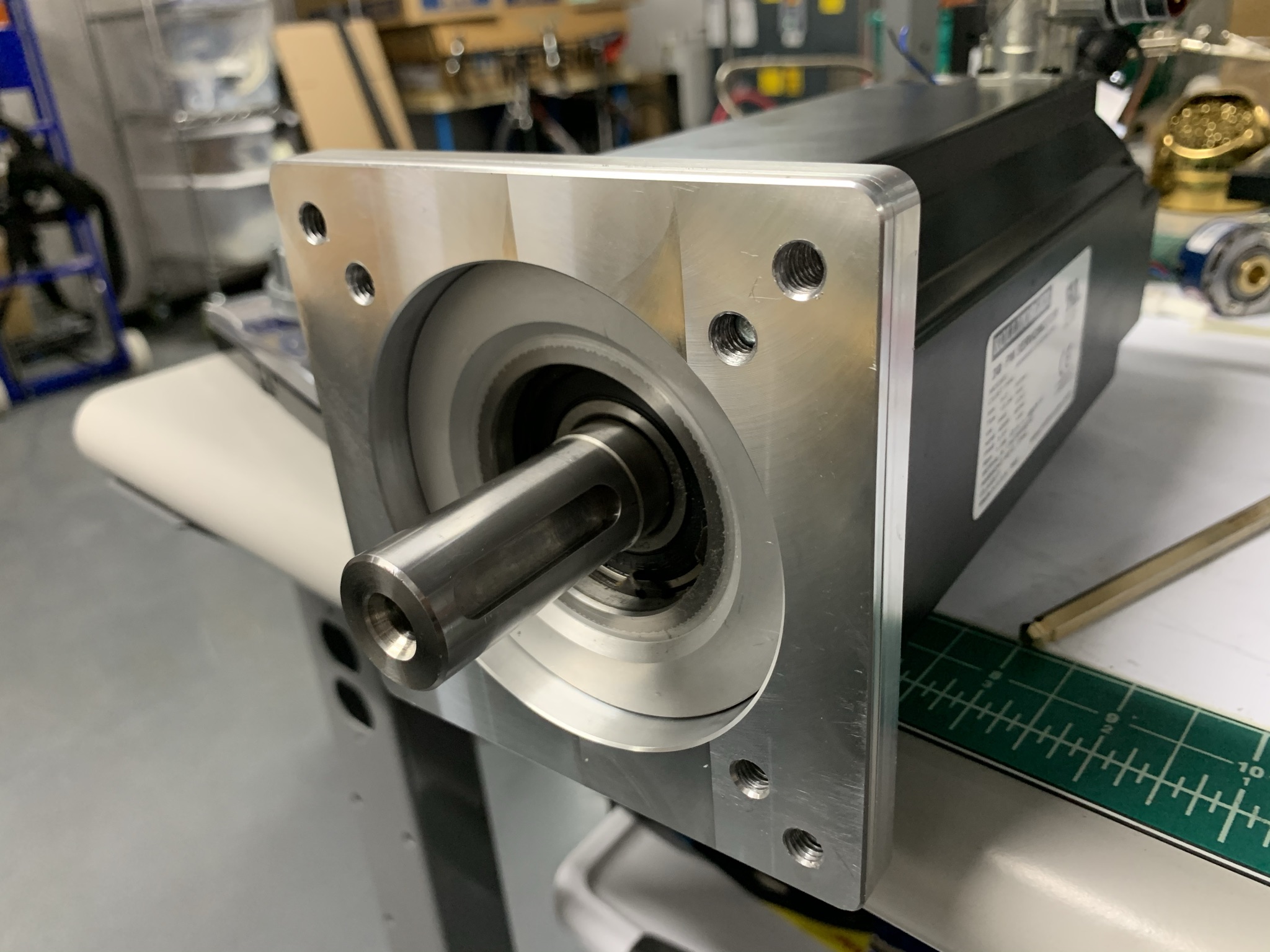
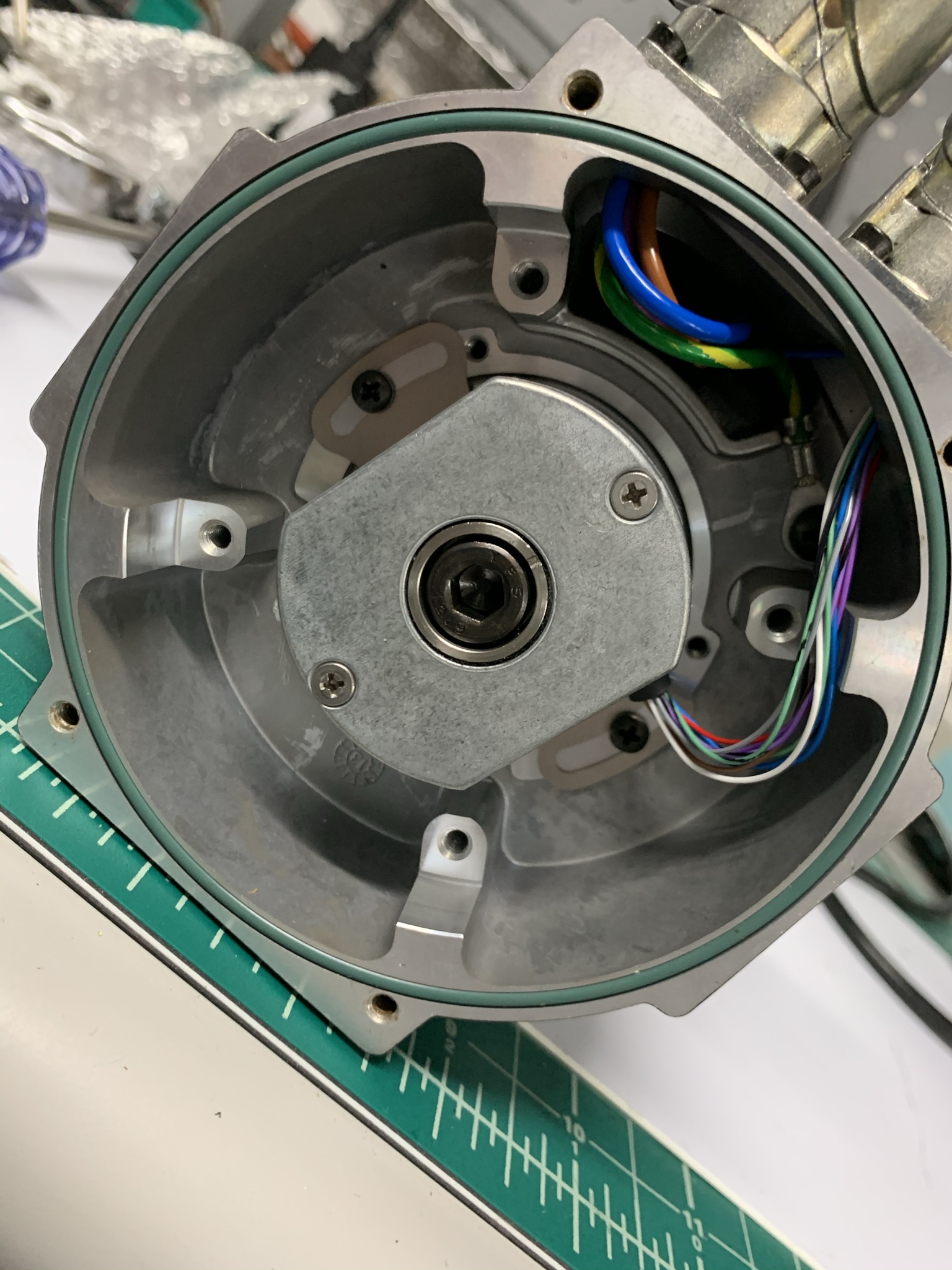
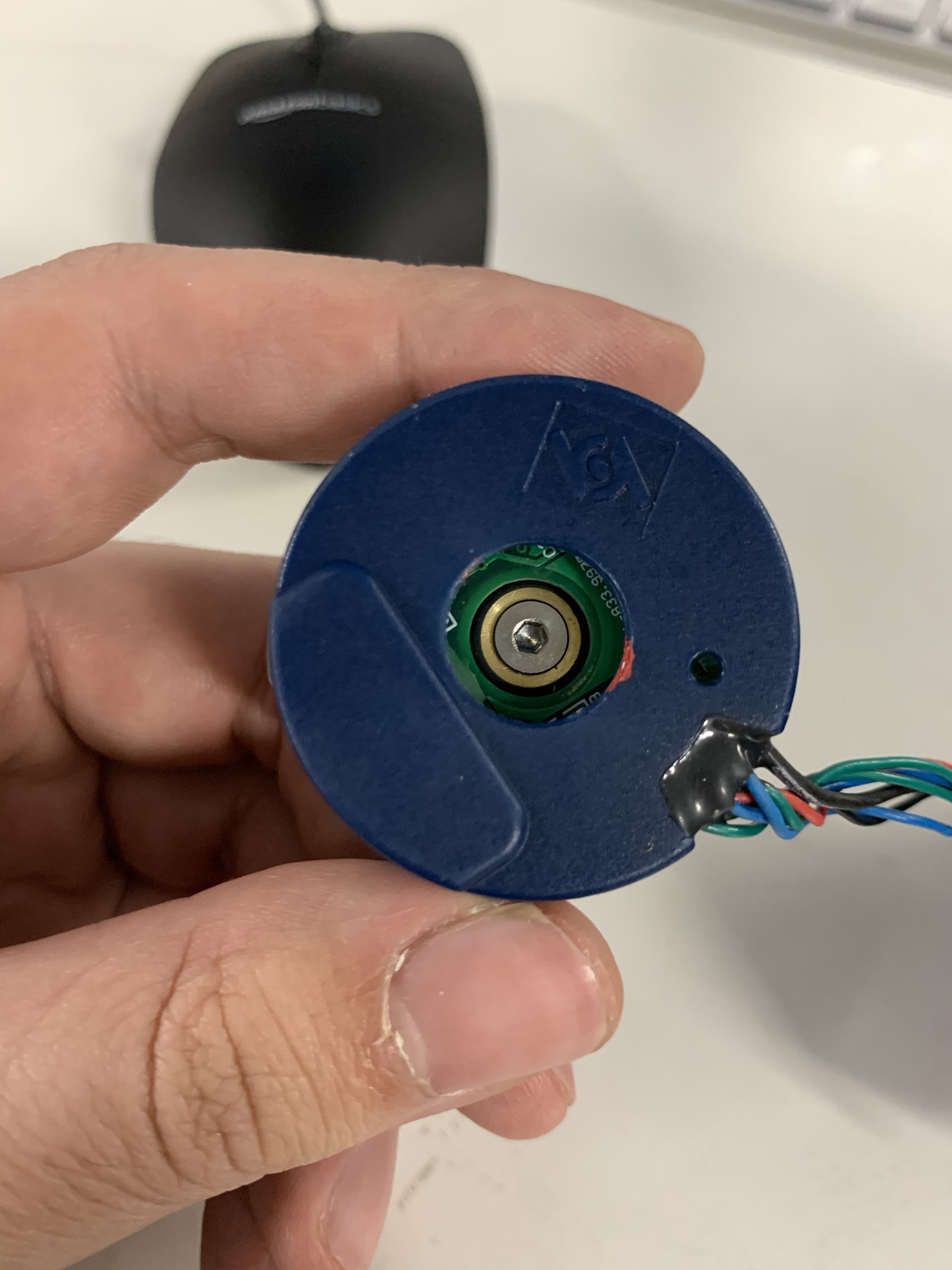
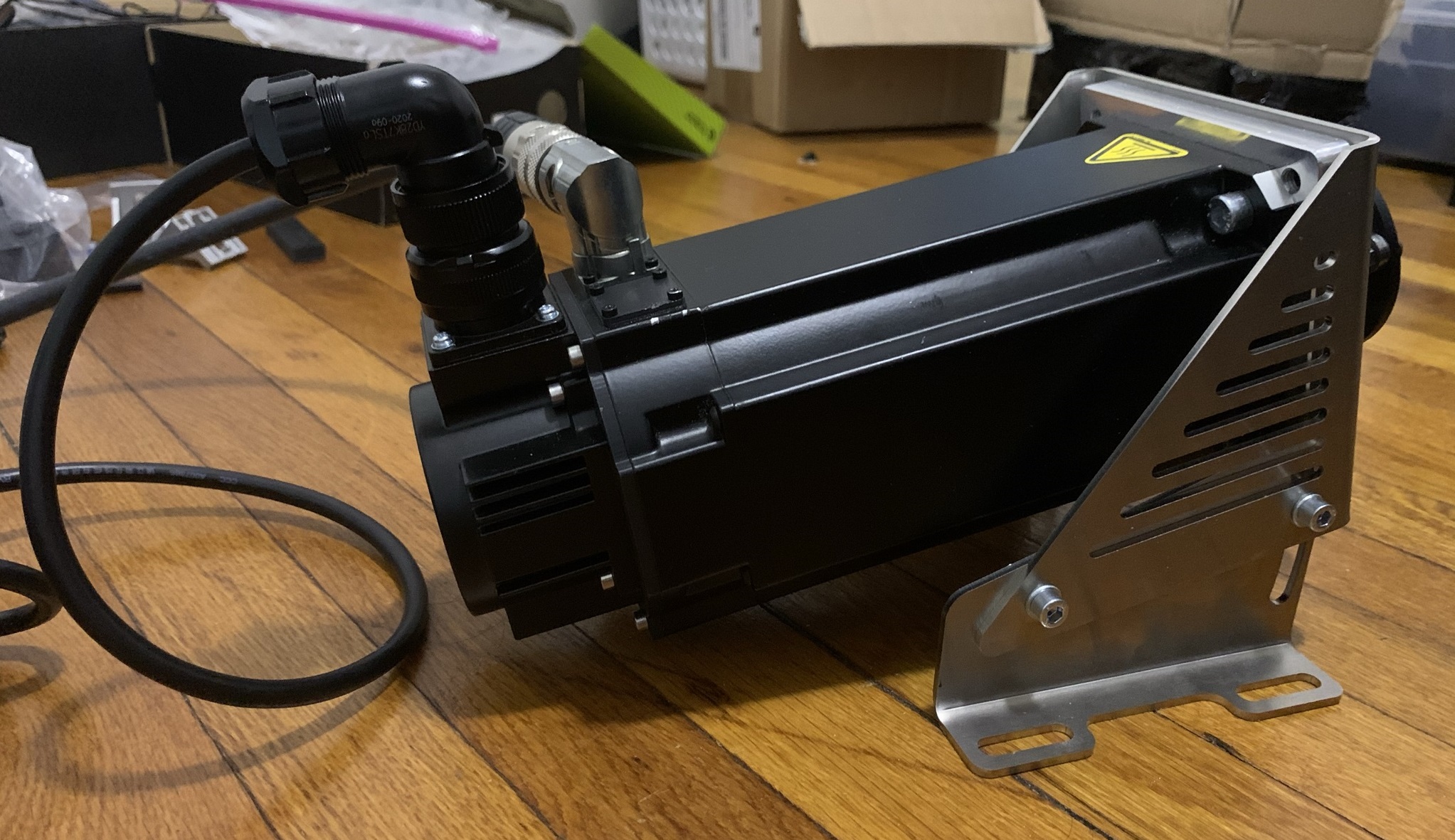
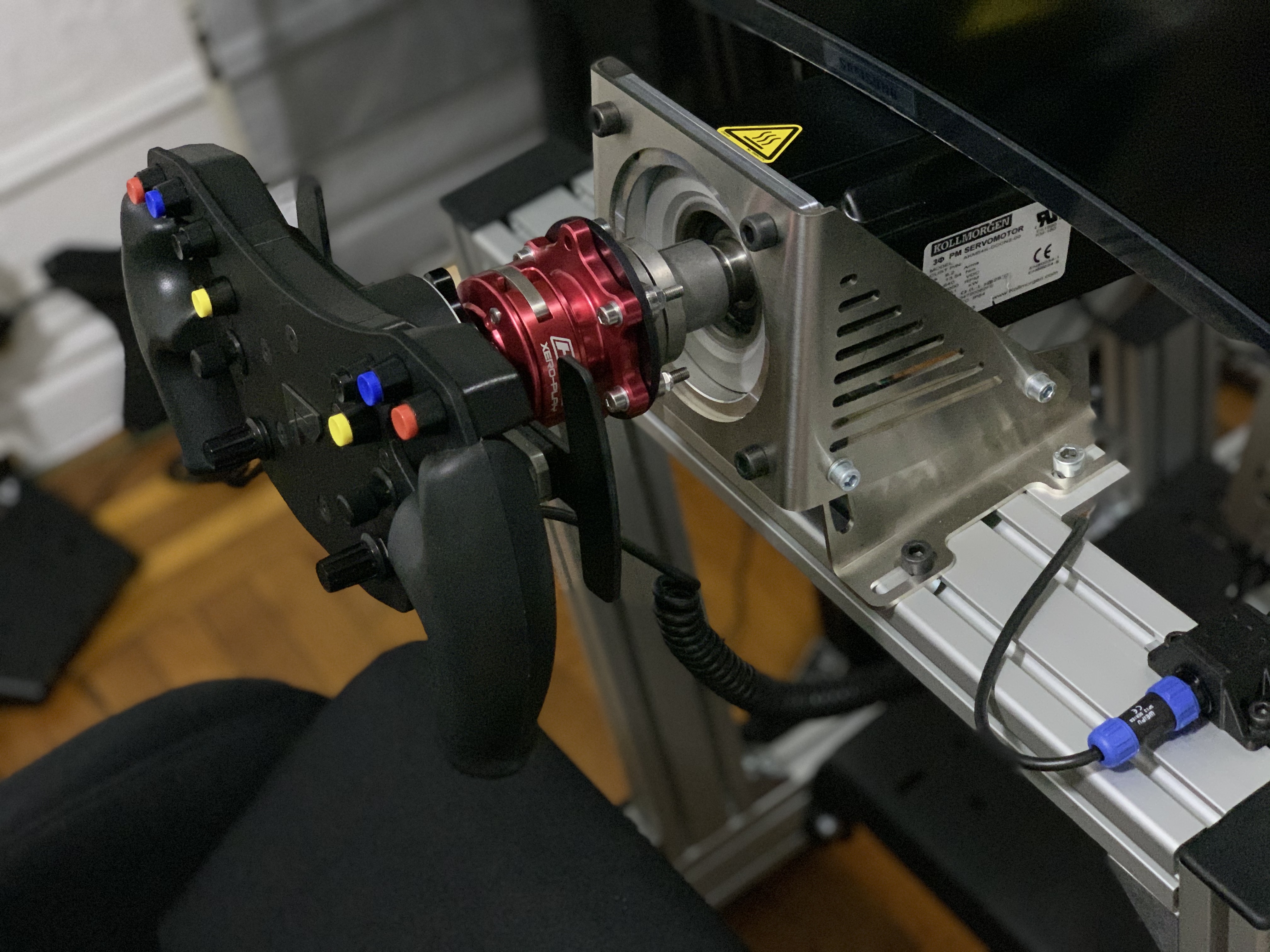
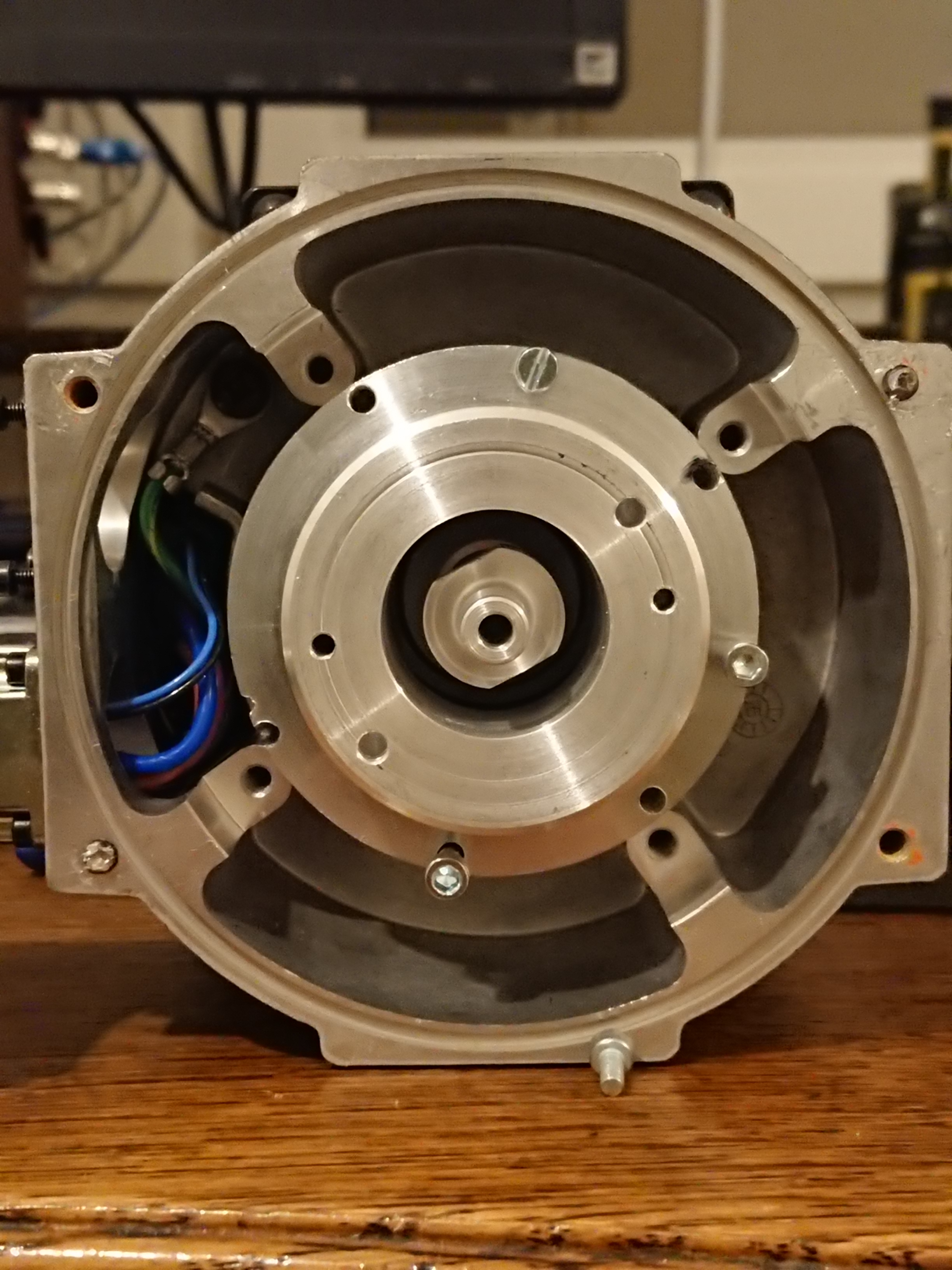
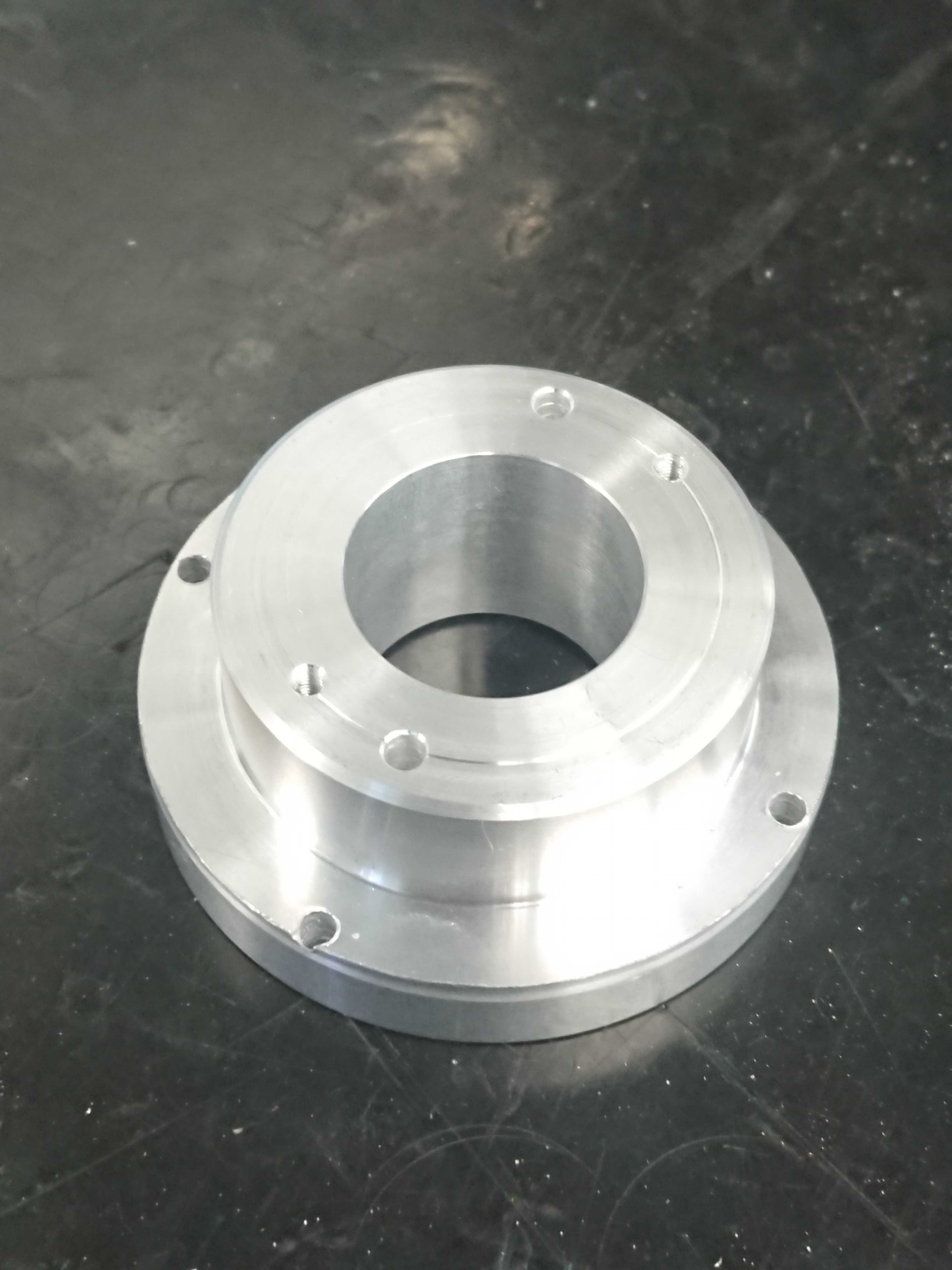
Scored a pretty affordable AKM54K Kollmorgen servo, will be building a simucube 1 system with it. The servo has a basic 8k encoder, I will be adapting a mige biss-c encoder to the servo, I’ve already been discussing the project with a few gurus, and I have access to some aluminum machining services through a friend of mine.
Servo is in the mail and I need to order the mige biss-C, a few questions:
-
I have the ability to make my own cables to my own specified length, just need to source the connectors. Is there a guide on where to get the exact power connectors for an AKM54K? It looks like an M23 connector, 8 pin, but not sure if there are different lengths etc
-
What size cable should I use for power and encoder? Should I size to 25A for Ioni Pro HC? Would 16 AWG suffice or should I up to 12, same question for the encoder cable.
-
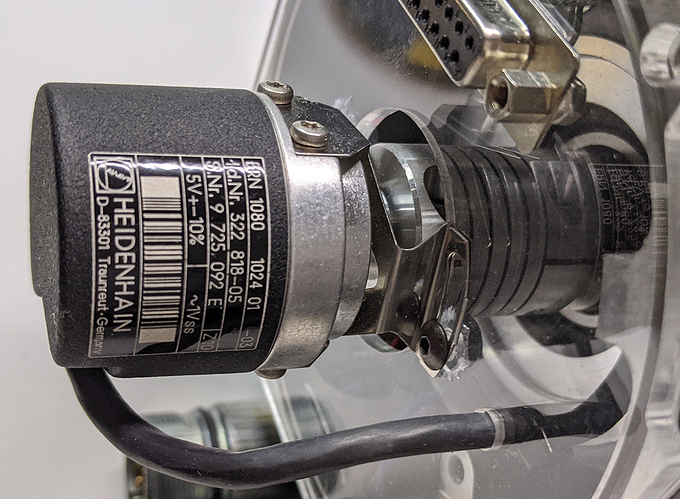
Does anyone know the mige connector that is used for the encoder? Would like to try to source that as well if its cost effective, if not I’ll just include it in my order from Lisa (unless someone has a mige biss-c they want to let go of/sell)
-
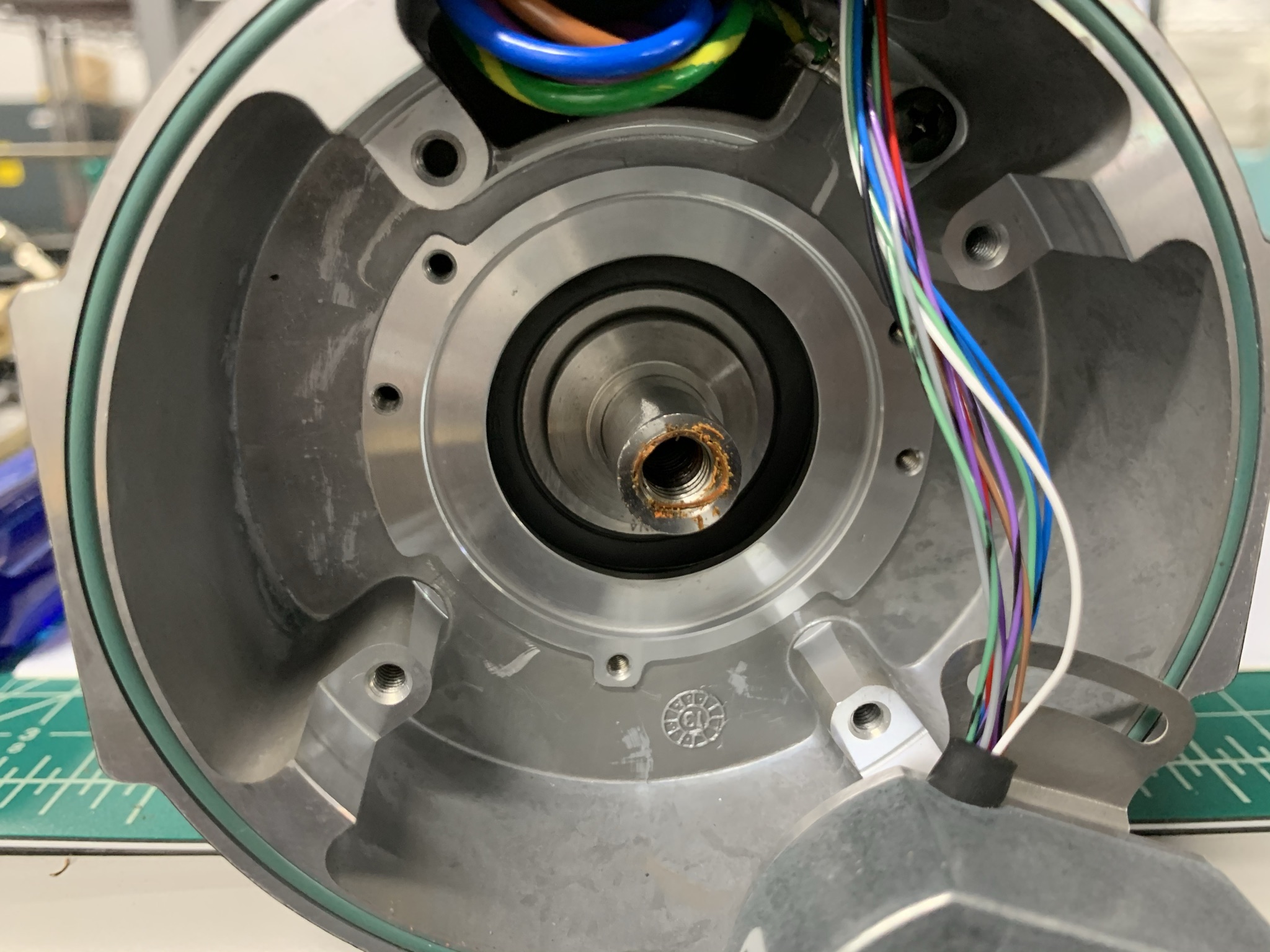
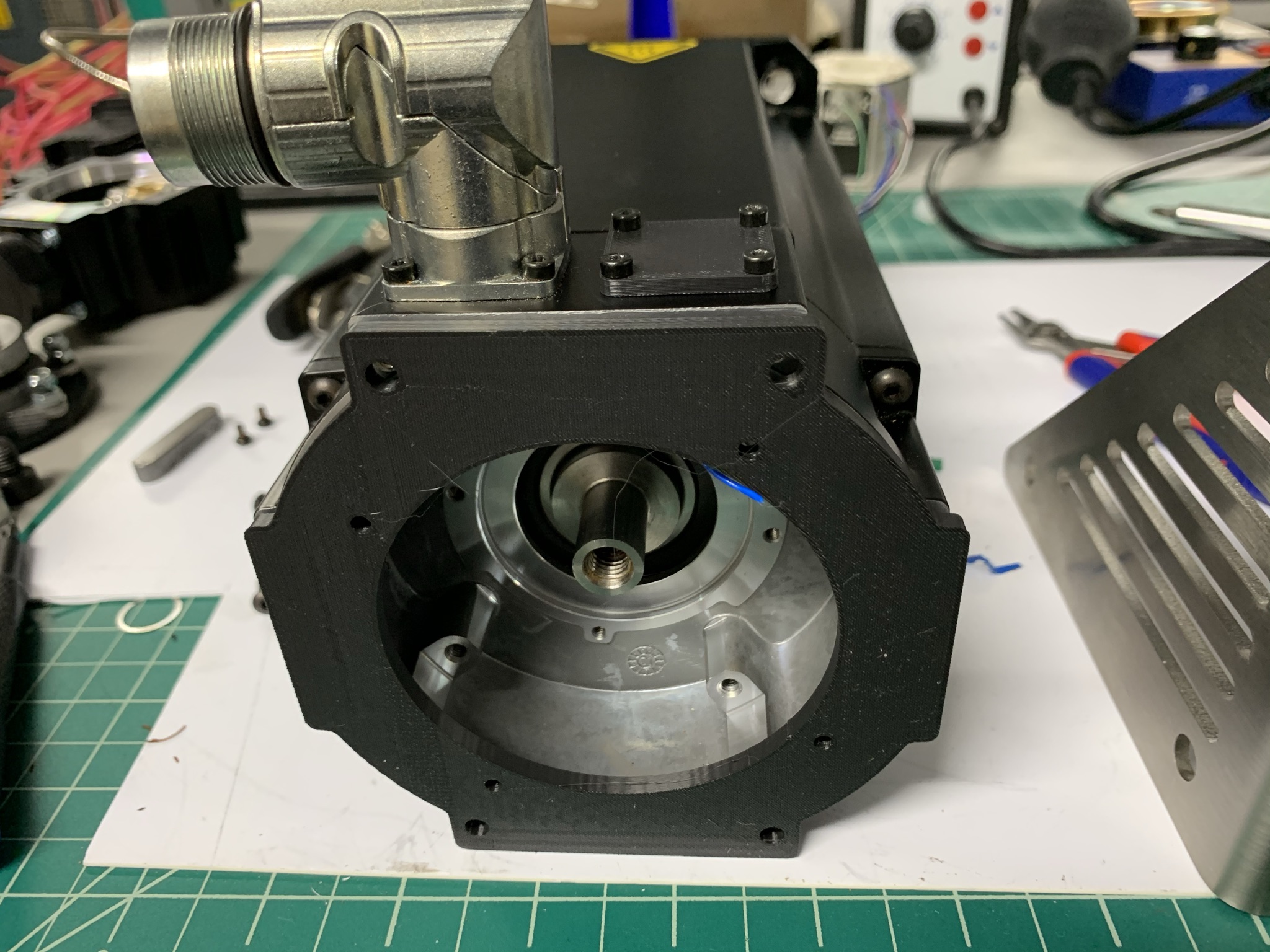
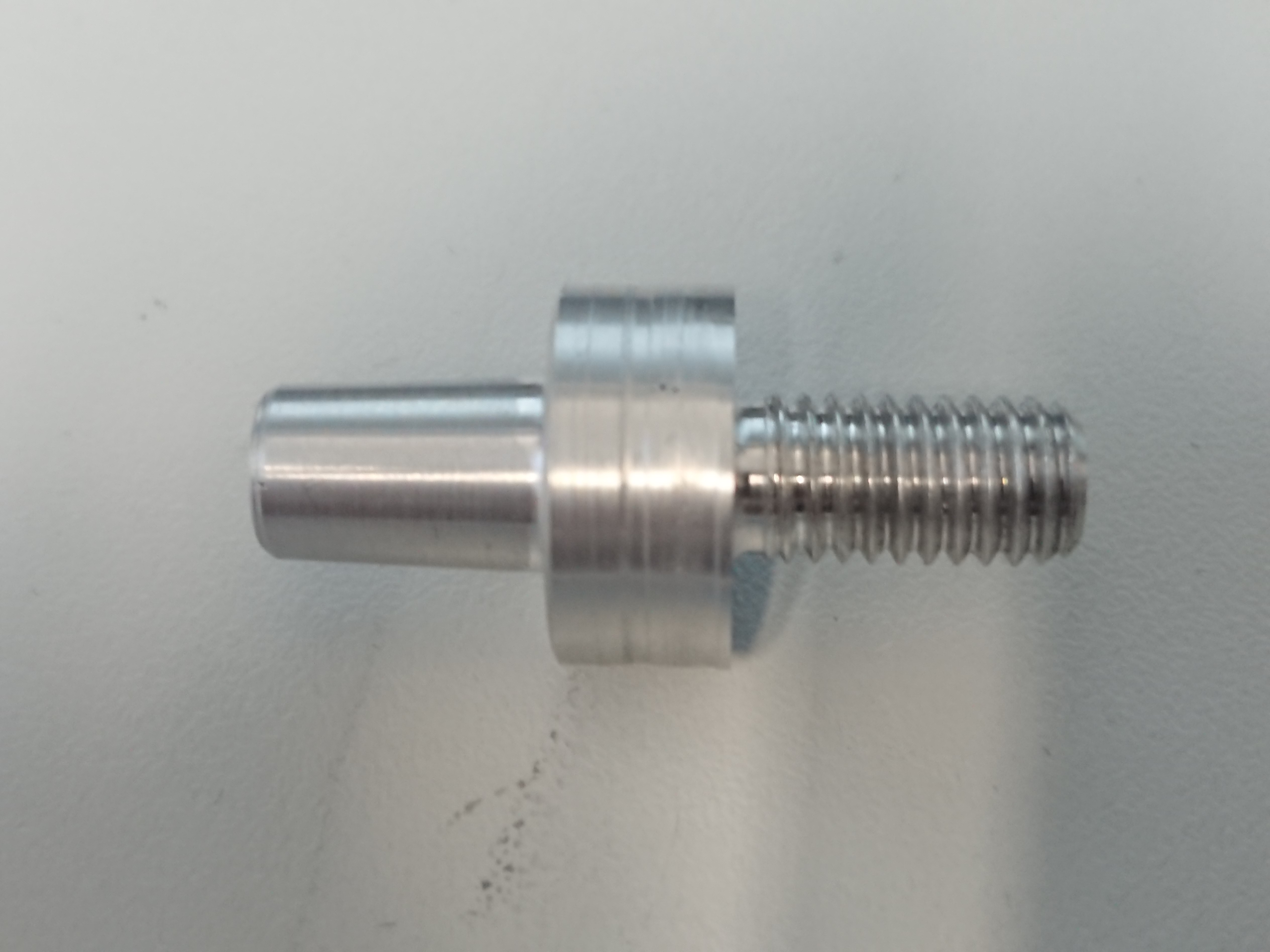
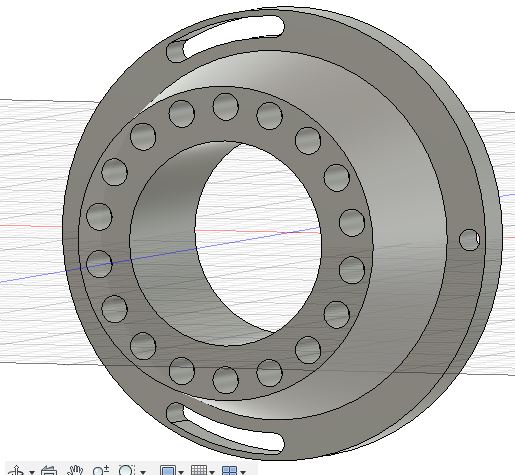
What are the dimensions and taper for the biss-c encoder and rear end of the shaft on the AKM54K? Can’t find that spec anywhere. Need this to adapt the AKM54K to the mige biss-c
For reference, the model code for the motor is AKM54K-CCCN2-00