[quote]
Road effects in ACC is 100% at 0, above 0 is 100%+ “your setting”[/quote]
yah but what entails “your setting”
damping is the only direct input filter that is being used actively in ACC; all others aren’t.
fwiw i run 0 damping, and friction in TD and ran some back to back tests with road effect at 12% vs 0% i found 0% road effects to be slightly faster, but it doesn’t feel real. you feel the road way less other than the kerb strikes, and because the bumps dont’ affect your inputs as much, you can charge the corners way more esp on bumpy circuits.
Damper is only for stationary wheel resistance.
Same as AC.
When you have road effect above 0, you are setting it at 11, that is emphasize what was calculated by physics.
Nothing wrong with that if you like it more this way.
But, it increases road mesh noise that some try to compensate with extta filtering or dampening.
If you feel that you need to do that, try dropping road effects first.
I am fine with 1, same as AC, in fact using same profile for both.
Personal preference, increase if you feel it grainy at low settings. Recon filter tuning is easy, just keep in mind that higher settings introduce latency and more signal artifacts.
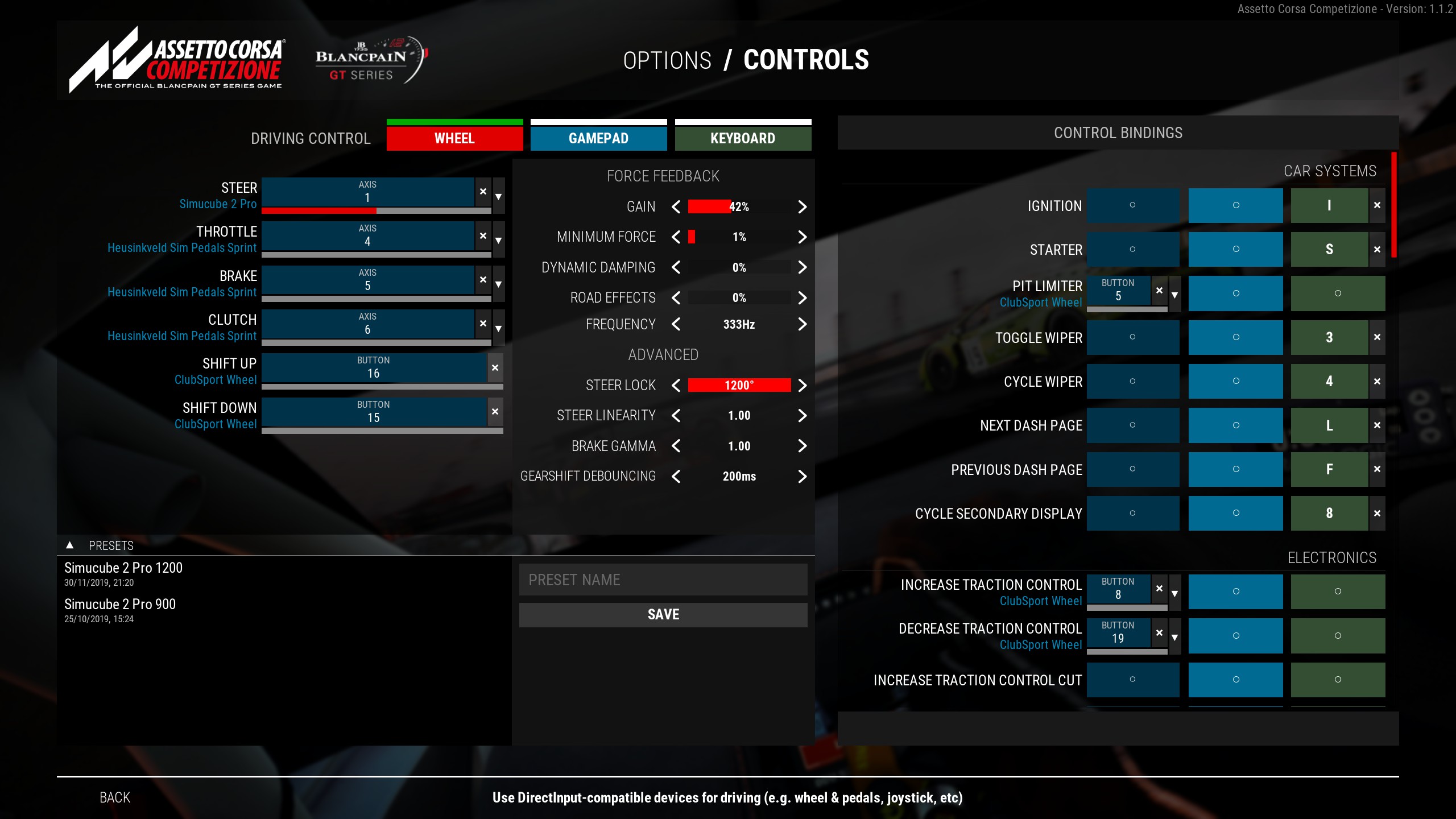
This is the default ACC profile shipped with latest TD.
Lots of things just don’t make sense in the context of that title, even DOR is wrong.
Recon at 8? It’s 333Hz FFB, what do we gain from such high value except losing details and adding latency.
Damper and Friction DI Effects at 10%, why? ACC only using damper and only for stationary resistance, not friction.
ULC at 10%, ACC does not have oscillation at all, what purpose ULC serves otherwise, is it for that non documented “rubberry feeling” side effect.
Friction at 7% and Inertia at 17%. Any significance in using these rather odd number instead of say 5 and 15.
If GD recommends some profile settings based on internal knowledge of servo and software, can we please have reasoning for these recommendations explained. Every change even if it does not have effect like DI Friction at 10%, should have meaning.
My reaction to the values was just “Err… no thanks, I think we can do better than that”.
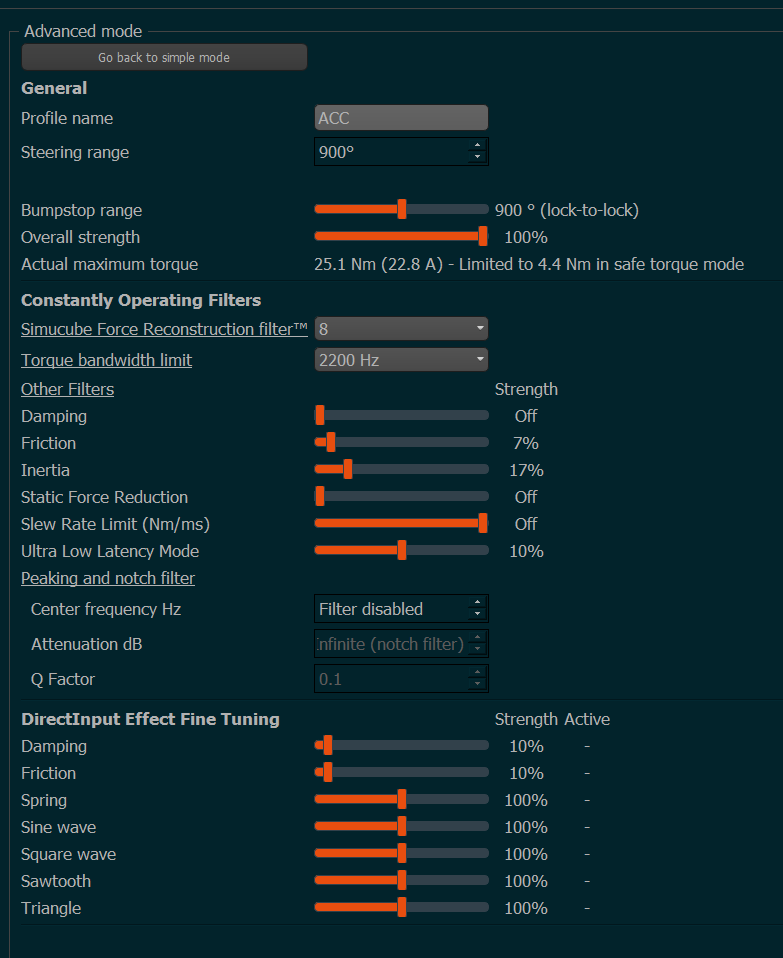
Here is what I’ve been using most recently. Perhaps if we posted our settings it might allow us to get a ballpark template that Mika could agree to and add in place of the current version?
There was no way to make a good working profile when the ffb didn’t work right until they added the 360hz option. Why anyone even bothered is beyond me before that. My process before that was try the ffb shelf it until the next update. It was that obvious something was horribly wrong with the ffb.
Another proof of how useless the default profile is.
Ask 100 users for their preferred settings and you’ll get 100 different answers with very few having ability to explain why exactly they use these values except “it feels good and I like it, buzz off”
Hopefully TD will retain all current functionality to allow tuning to everyone’s liking as flexibility and abundance of tuning parameters is the actual strength and true competitive advantage of SC2 package.
I’m using the default profile since it was implemented in td, and feeling very good with that, just lowered recon to 2.
all that said, I really don’t understand your constant ranting about everything in any thread, all against the Simucube team and their work.
it’s getting really annoying dude.
seriously, just get another wheelbase if there is so much that bothers you about SC2
Perhaps you can work with @Exact-Performance and get some baselines for different games. His AC profile is by far the best I’ve come across when comparing to real life tracking cars at a competitive pace.
I think it would help Mika to lower his workload if he was able to ask his most trusted testers of each title to help formulate a template, time permitting of course.
I tried those settings, felt really bad for me, much worse thank default ones on td…with all those effects, they might be good for belt or gear driven wheels, but really there is no reason to have them on dd wheels