I just buy a basic kit in order to proceed to buid myself a direct wheel drive, the configuration is;
IONI Pro HC Servo & Stepper Drive
-NDR-480-48, 480 W 48 VDC power supply
-SimuCUBE
Everything is connected as it should be, power, X4 pin to PC…
The first question is, as soon the hardware is wired, should i proceed to stablish the communication between Granity and Simucube, isn’t it? Or there are some steep before ?
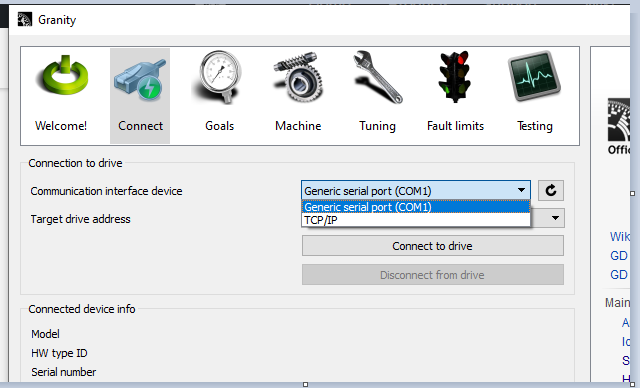
When i am trying to stablish the communication i can only see on “Communication interface device” 2 possibles connections ; Generic serial port (COM1) and TCP/IP, the other possibilities are missing, do you know why?
Are there any devices with yellow exclamation mark in Device Manager? I’ve seen issue where the FTDI virtual com port driver was somehow installed wrongly, and also that Windows had managed to somehow detect a mouse in that port (!) and thus no connections to that port could be made.
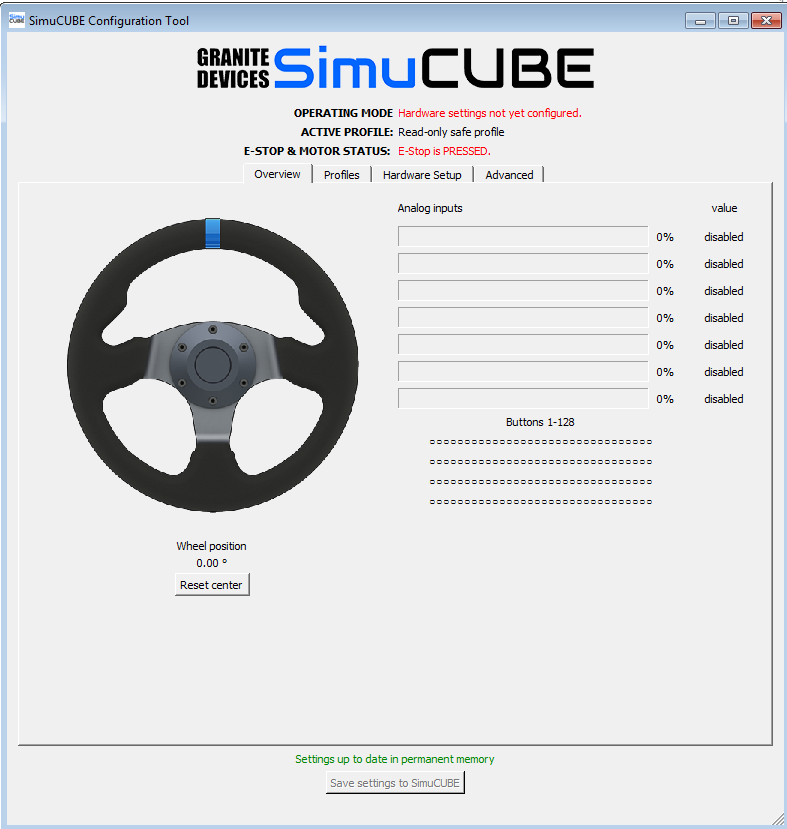
i already change the usb and the same… The Granite Devices support told me that I should install SimuCube configuration tool ( firmware ) and enable the Granity connection from the simucube configuration software
Is this SimuCuce configuration tool (firmware), should i go to advanced -> Enable IONI configuration via USB, is it right?
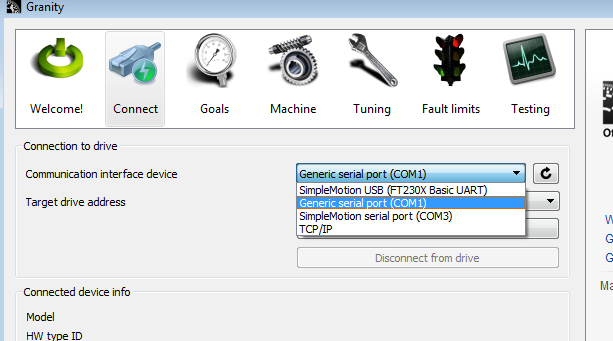
However, if you do not install anything, or just install the Simucube bootloader via DfuSeDemo and not the firmware afterwards, then the X4 USB port will remain available for Granity.
I also prepared the MMos frirmware the dfu file is created, but there is noway to put the board in DFU mode, i already the guide from top to down, case A, B and C…
Wich is the prioritz stablish the comunication by granity or uplade the .dfu file ?
Then you should install the Simucube Bootloader DFU file from the latest 0.50.4 release, and then Simucube Firmware by using 0.11.2 version which is the most stable version for new installs.
I changed all my computer to Win 10, then after connect semicube board on pc, I can´t see the ST32 bootloader i already change several times the usb port.
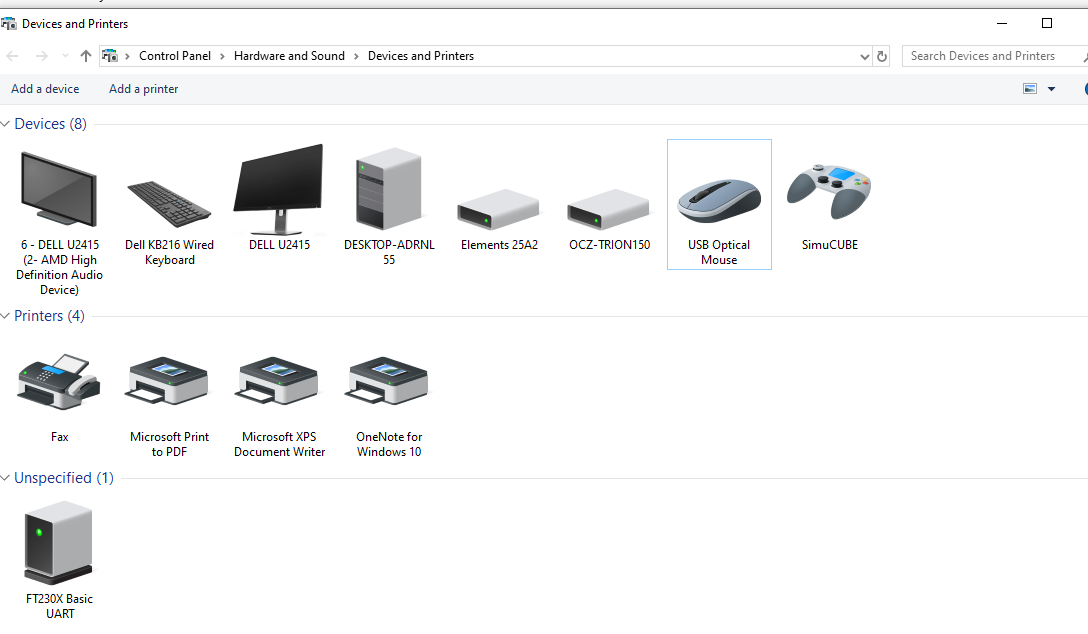
When i connect both x3 and x4 to pc I can see this
I forget to mention that i have connection trough Granity and i have already installed Difu and SimuCube configuration Tool ( 0.11.2 becuase is a Biss c encoder).
The first step should load the Simucube Bootloader DFU file from the latest 0.50.4 release, but if i cannot see ST32 bootloader there is no way to proceed