Motor: Mige 130st-m10010(The parameters provided by the motor manufacturer show that the speed of this motor is 1000r/min, and our household electrical frequency is 50hz, so the number of poles of this motor should be 6.)
Power: meanwell sdr480w-48v
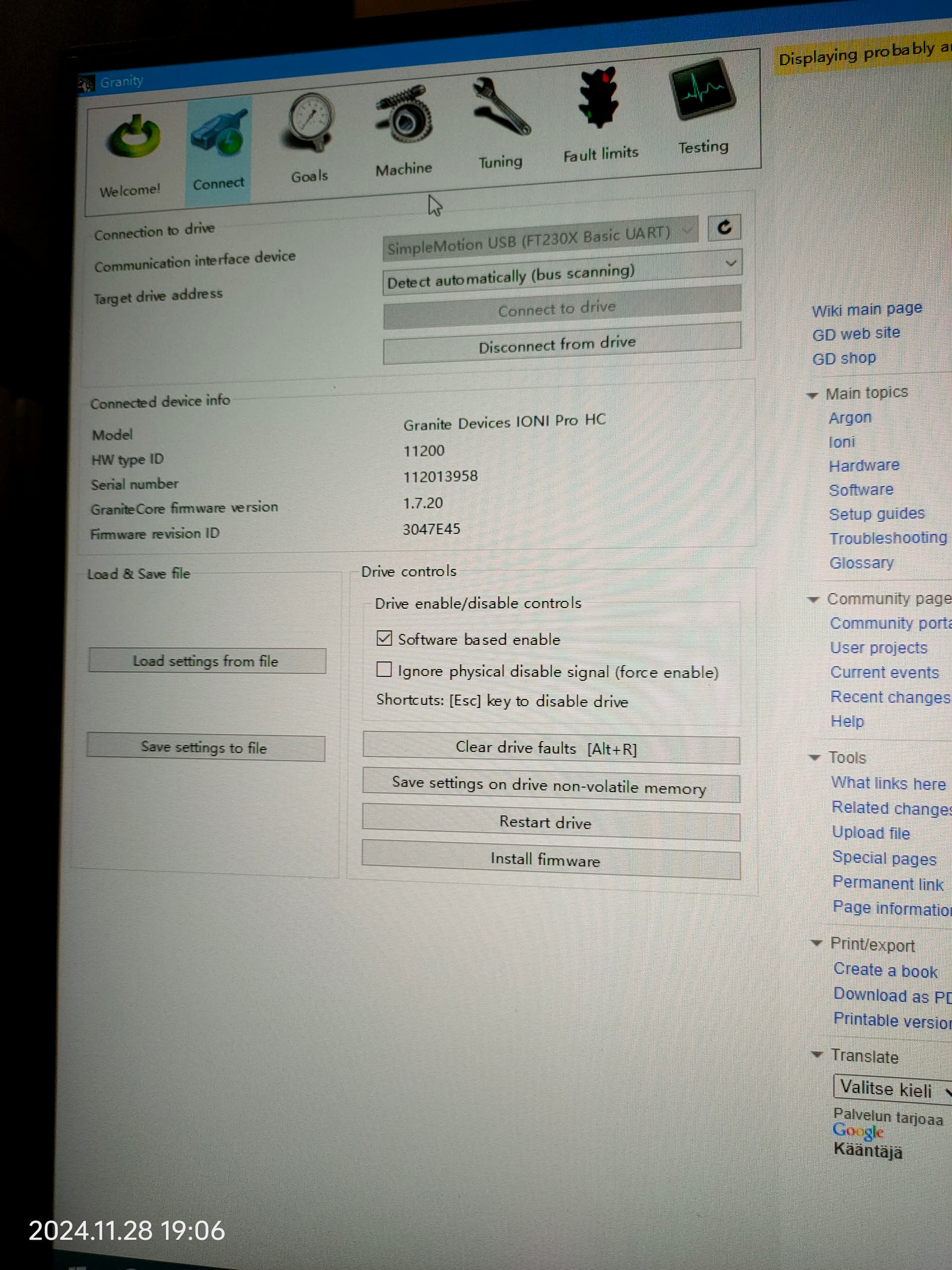
Firmware is the latest version.
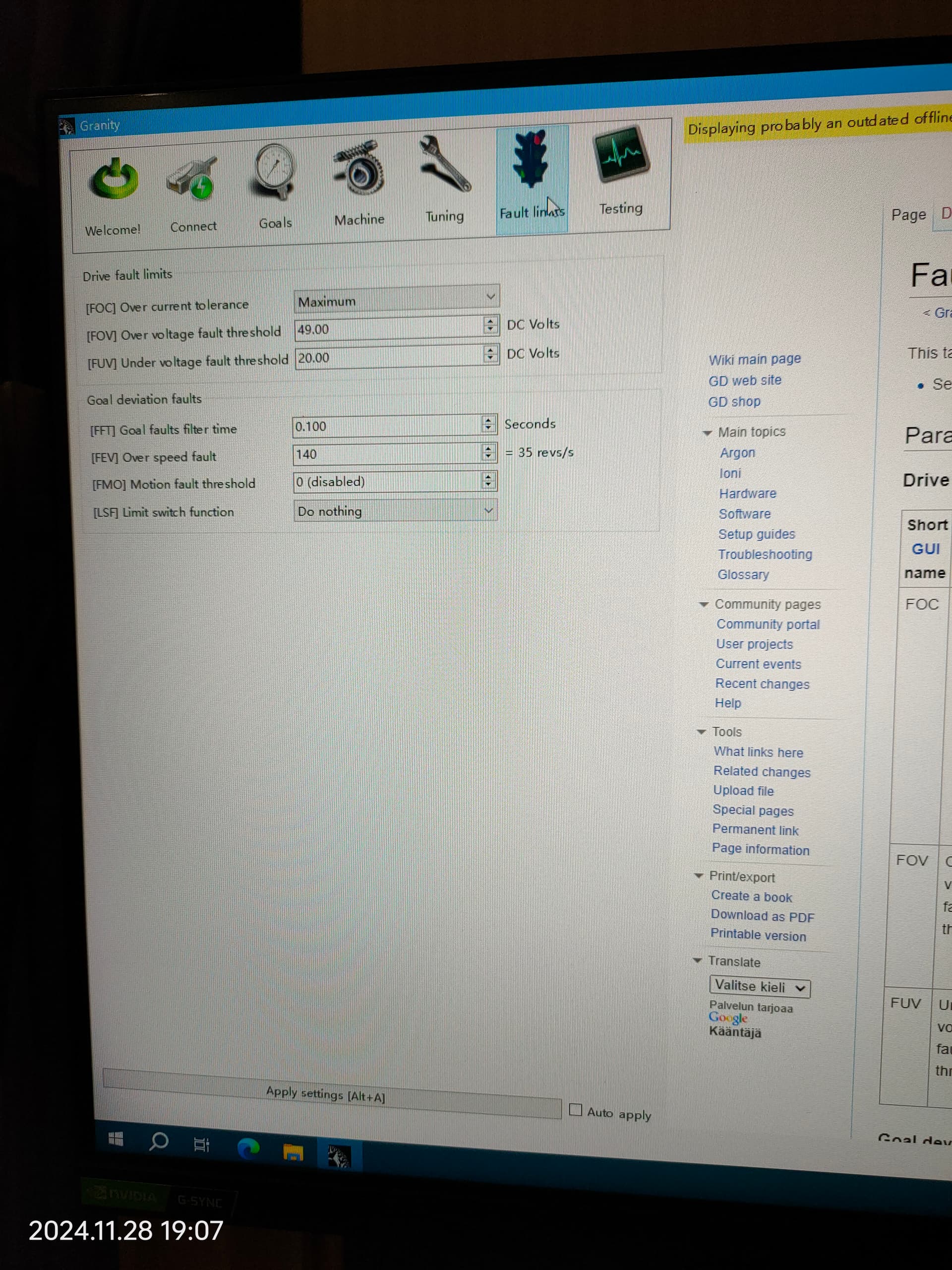
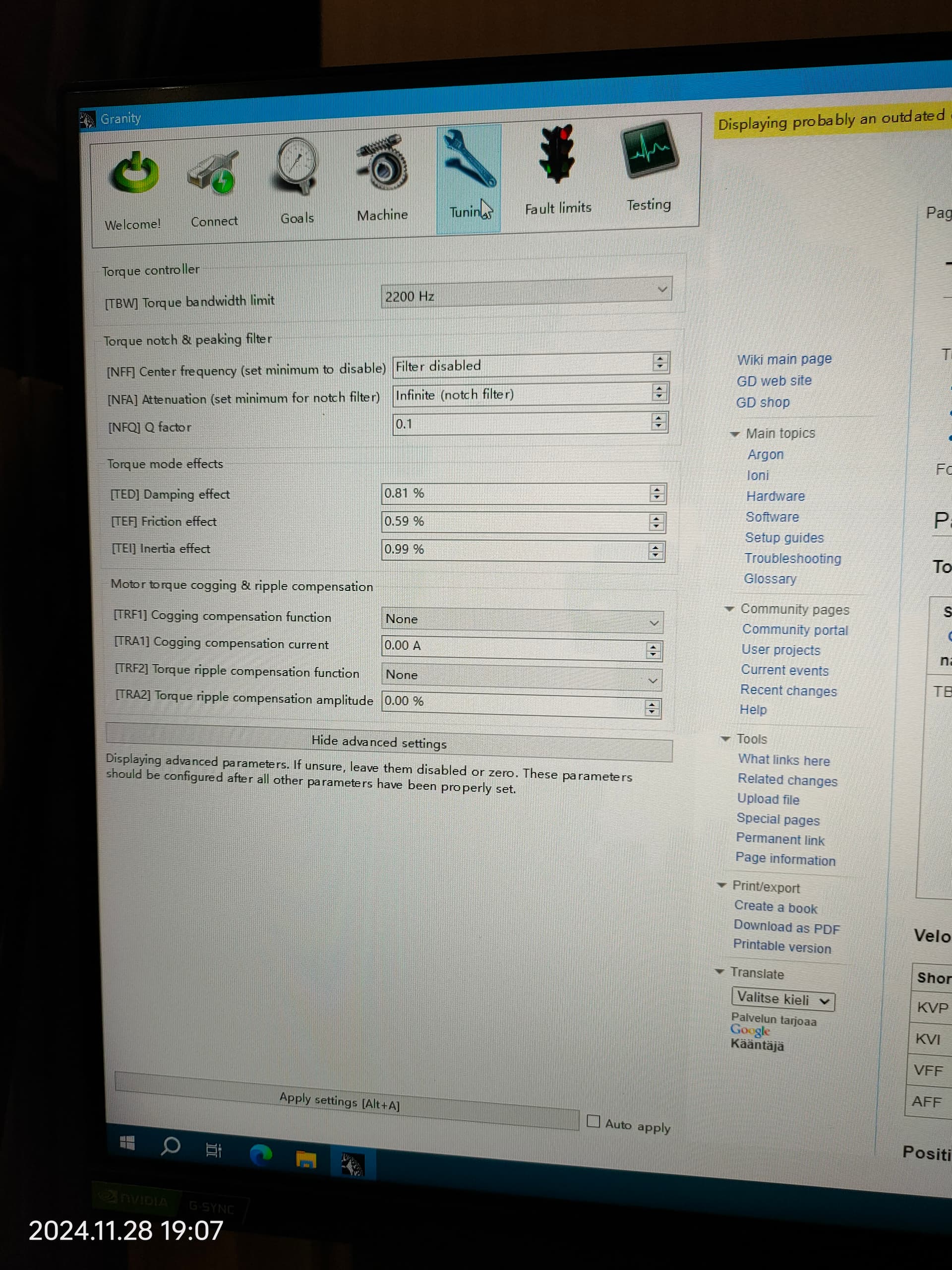
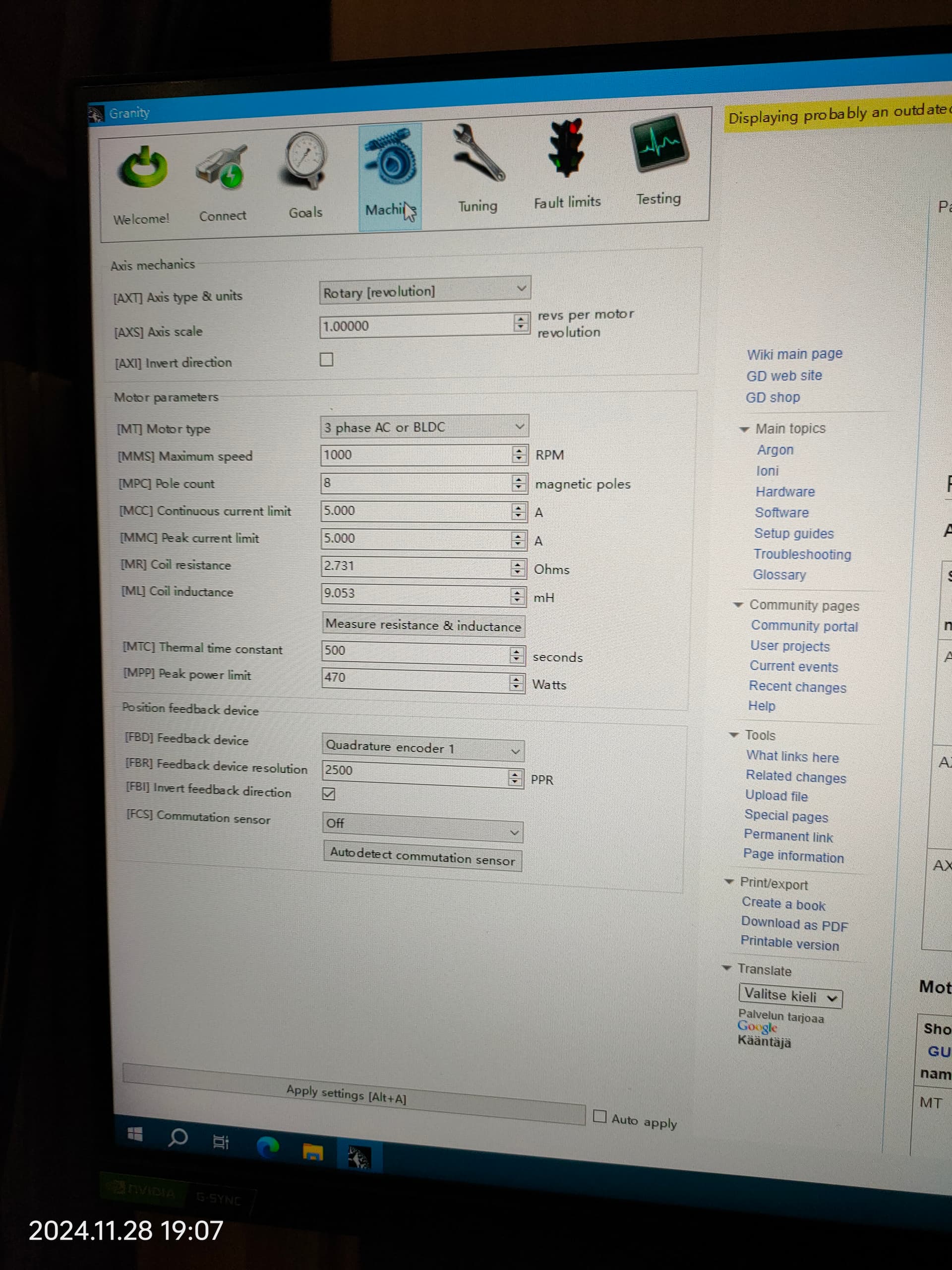
The parameters of machine in Granity are all the parameters in the files provided in wiki.
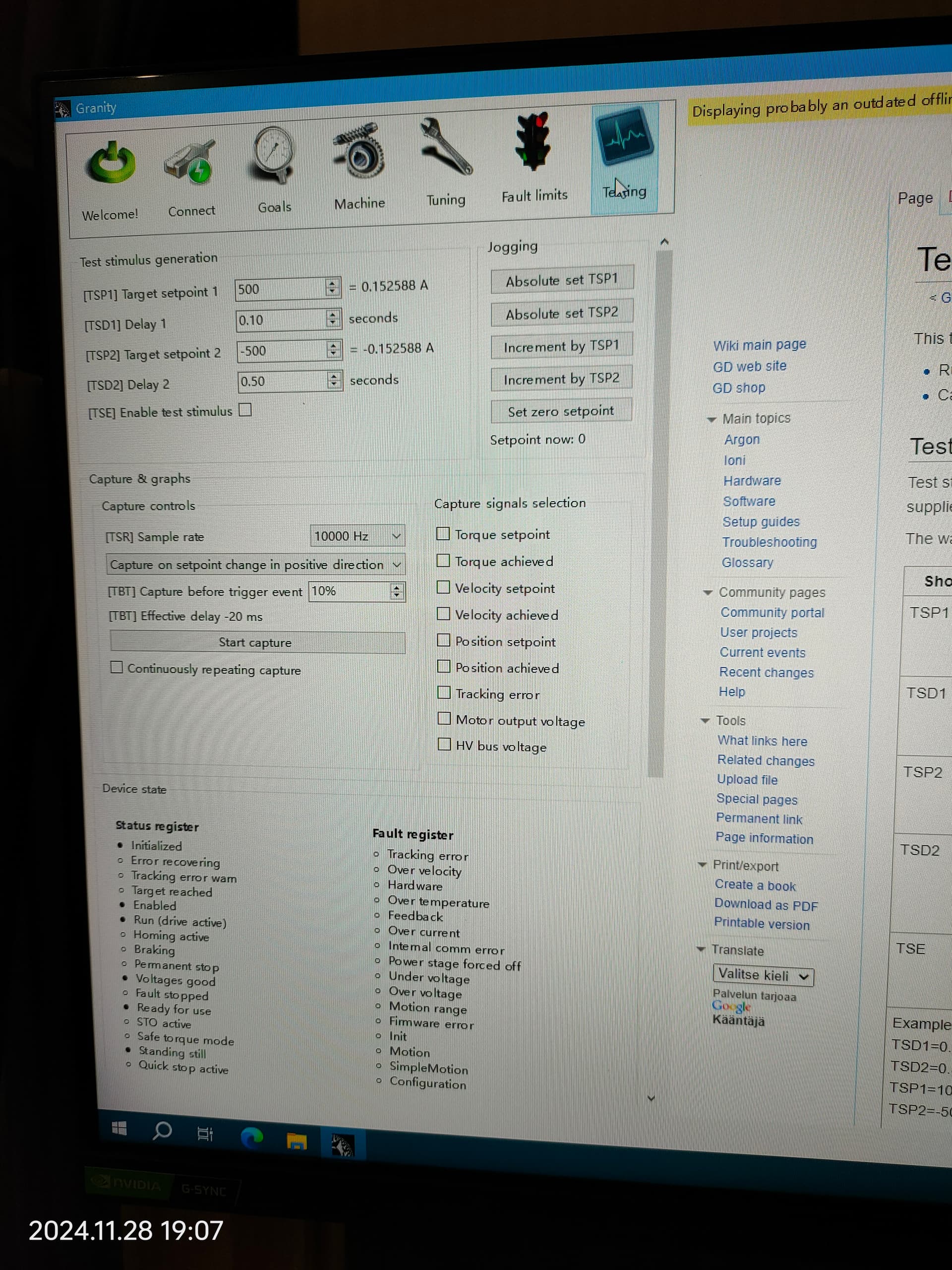
When I set the number of magnetic poles of the motor to 6 and 8, the motor will be abnormal, which is embodied in that every complete turn of the steering wheel by hand will stop at the position of 0°/90°/180°/270° as if it were sucked. If you try to keep turning the steering wheel by hand to leave these positions, there will be a strong swaying force, and there will be a current sound at a certain connection of the driving board. However, when I say that the number of magnetic poles is set to 4, these problems will not occur. In the test, the steering wheel can rotate continuously when the “Increment by TSP1” option is continuously clicked to increase TSP1 to more than 1000, but this cannot be done when the magnetic poles are set to 6 and 8.
The Mige motor should have 8 pole pairs so the correct number to put in Granity is 8.
Your household electricity or frequency has no bearing on it.
If the rotation is notchy, either the motor rotation direction as read by encoder is wrong → invert encoder. Or the rotation of phases is wrong → check/uncheck the AXI invert parameter, or swich any two of the U/V/W phase wires between each other.
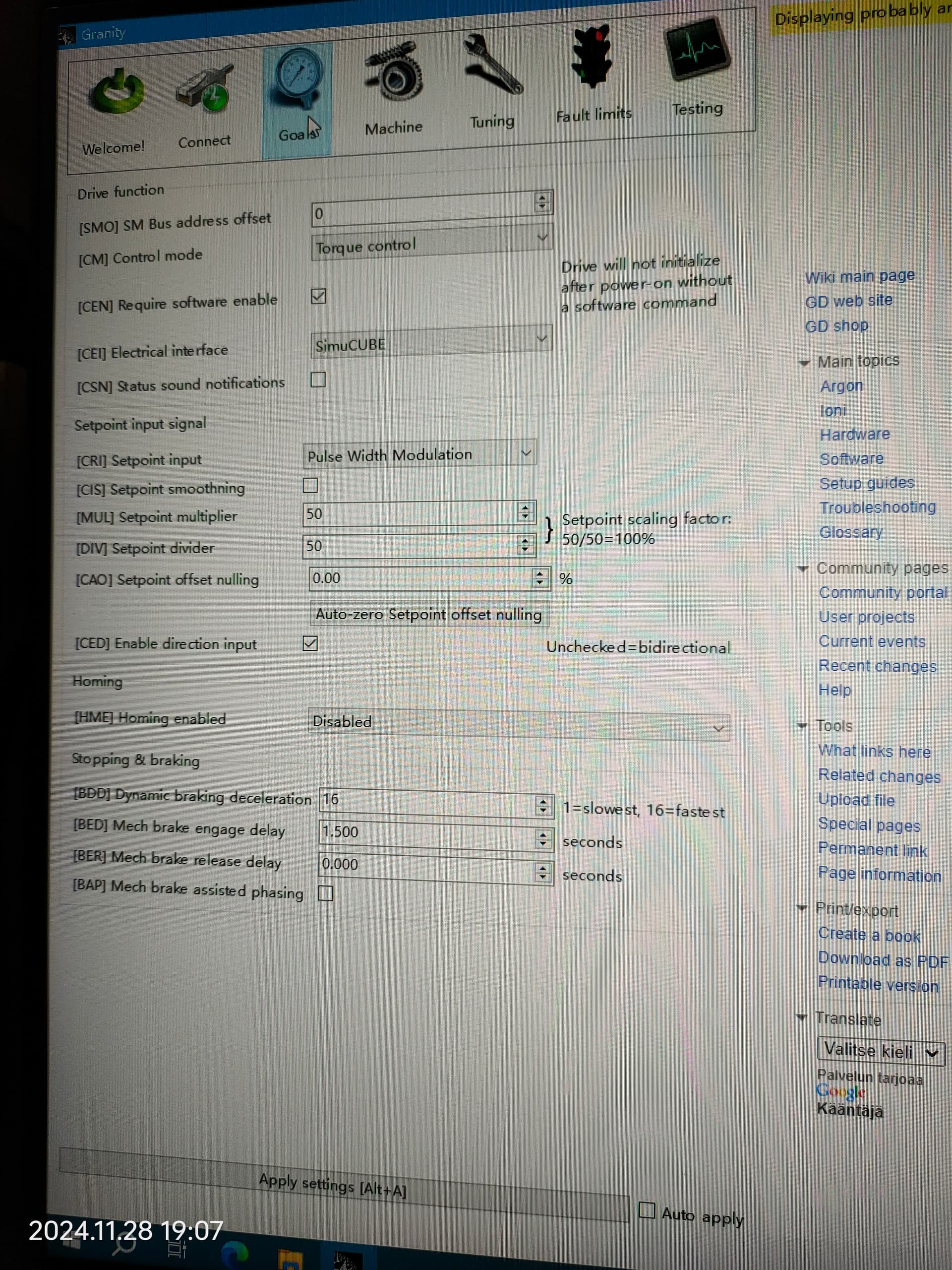
Another problem is that in Assetto Corsa, when the vehicle is stopped, the steering wheel rotation and the steering wheel rotation in the game are synchronized, but once the car starts moving, even if the steering wheel is turned a large angle, the steering wheel in the game only turns a small angle.
Hi Mika.
Will switching any two phase lines damage the motor? I checked the uvw three lines at both ends of the power lines and they are correctly connected.
I have already unchecked AXI as you suggested, and there has been no change. However, when I checked FBI again, I found that there are more positions where the motor will be attracted in this circle, from the original 4 positions to the current 12 positions.
I have already unchecked AXI as you suggested, and there has been no change. However, when I checked FBI again, I found that there are more positions where the motor will be attracted in this circle, from the original 4 positions to the current 12 positions.
Under ‘Machine’ tab, t here are few possibilities you can test, only 1 will work
AXI on FBI on
AXI off FBI off
AXI on FBI off
AXI off FBI on
Make sure that wheel position feedback is counting up when turning wheel cw, and counting down when turning ccw, in the testing tab. Like Mika said earlier, there are other ways to get correct behaviour by swapping phases, but doing it through the interface is easier.
Make sure to save settings to drive and restart after each change, to ensure settings stick.
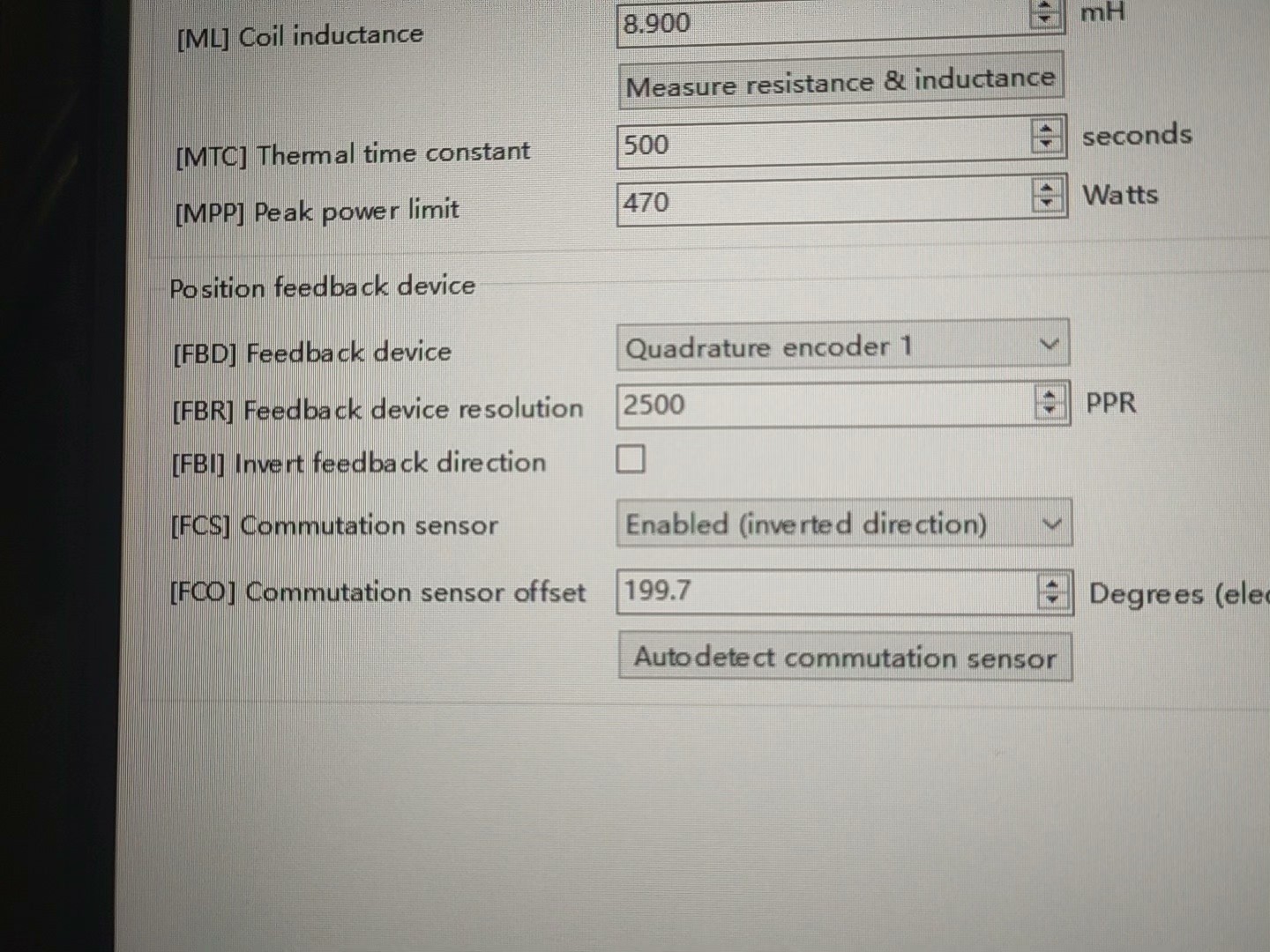
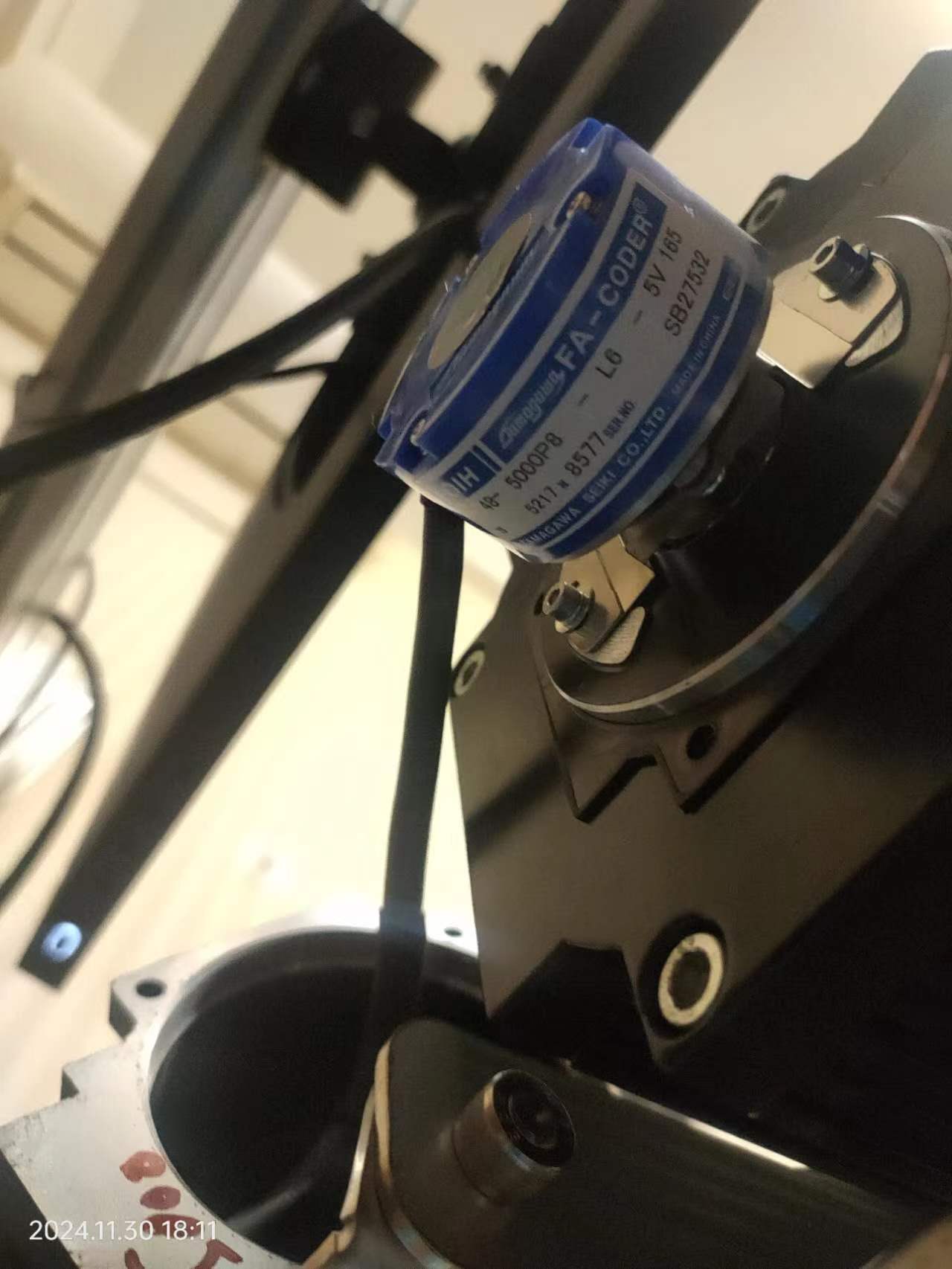
PS: It is also possible you have a higher resolution encoder, so you might want to confirm which one you have. If you open the rear over, you can post a photo of the numbers on yours, then we can advise.
When both AXI and FBI are checked, there are twelve force balance points in a circle, and the rotation direction in simucube is opposite to the actual rotation direction of the steering wheel.
When only AXI is checked, there are four force balance points in a circle, and the rotation direction in simucube is the same as the actual rotation direction of the steering wheel.
When only FBI is checked, there are twelve force balance points in a circle, and the rotation direction in simucube is the same as the actual rotation direction of the steering wheel.
When both AXI and FBI are not checked, there are four force balance points in a circle, and the rotation direction in simucube is opposite to the actual rotation direction of the steering wheel.
No matter how these two options are changed, every time the steering wheel rotates 90°, it will be shown in simucube that it has rotated 180°.
At first I used the drc file from the wiki, and then I changed some parameters according to the motor test tutorial on the wiki, but no matter how I changed it, I couldn’t solve this problem. Even reloading the drc file from the wiki without changing any parameters did not help.
Yes, I changed the encoder resolution to 5000, and the balance point problem was solved, but after entering the game, another problem I described in the previous post appeared. First, the steering wheel has no return torque at any time. Second, when the car is not moving, the steering wheel and the steering wheel in the game are synchronized, but when the car starts to move, the steering wheel and the steering wheel in the game are not synchronized. Even if I turn the steering wheel 450°, the steering wheel in the game only turns a small angle. Third, when rotating the steering wheel, there will be an electric current sound at the end of the uvw three wires connected to the driver board, just like the sound of a ratchet wrench rotating.