Yep,
Jani can try 5 recon filter, 3 damping, 1 friction and 3 inertia.
This is also very good setting. Sebring is a very brutal track, it shakes the crap out of things, and you will also need to play a lot with car dampers to get it to behave well.
I have tested all Recon Filters and see no need to go higher than 5, at least in iRacing. With the remaining filters, I can get the car to feel like old OSW, overly harsh and brutal like running on Fred Flintstone wheels, all the way to street- and high-performance race rubber.
It is just a matter of tweaking to find something you like
Just spent a night hot lapping in AC Ive been running the reconstruction filter at 10 what Ive noticed is that it saps(softens) the road detail of the small bumps. Turning down just 1 notch returns them, Cant really feel much difference between 8 and 9. But 9 is very nice
We will have to simulate the behavior of the filter when used in other games than iRacing. I will attempt to get real data sometime soon. Generally, values at 8 and over overshoot quite badly in iRacing, but they might actually be OK on higher update rate games. Similarly, we might develop different filter parameter ranges altogether for different update rates.
That’s great to hear! these are exciting times.
To make setting up the filters easier could we have a overshoot count or some sort of log so we can understand how imperically how the filter is performing?
That might prove to be something that cannot be done, as things like overshoot “amounts” can be difficult to “measure” and also reading any other parameters than encoder position and motor status register from Ioni takes too much time.
The Overshoot would be hard to calculate… Infact if you look at the graph that Tero posted on the triangle it actually doesn’t appear to be overshooting as much as having a slight time offset at the peak because if the tip were moved slightly over it would continue the arc of the peaks… But that being said that doesn’t mean that other parameters wouldn’t be way off but then that is where it could be used for feel… I made a suggestion to Mika on possibly a better methodology for this filter to maybe make it a little less “Tuning Aid” as it really isn’t a tuning aid but a “Signal Corrector” so we will see.
Ok, I finally had time to test more. Thanks guys for suggestions
.
I just can’t use high damping settings, to me it dulls the car too much. I like to feel the weight transfer as much as possible.
I have used iRFFB for a long time and to me, it gives little better filtering (60 Hz direct 720).
Recon filter at settings 7 and above gives a really nice rubbery feeling, as good as iRFFB 360 interpolated. I hope in future we will have other filtering options as well.
Anyway the overshoot appears to be problem only in really bumpy tracks.
Here’re some settings I’ve ended up using currently. While settings are mostly focused on rFactor2, every sim I’ve tested is better with beta FW than with old MMOS. My settings are work in progress as more testing reveals better things and I just read that guys have further ideas for Recon filter too, so no foreseeable end in tweaking paradise
The feel I’m aiming for is a bit on the active side. I know realistic steering feel is usually more dampened, but without motion rig I like to have all the information possible through steering wheel and haven’t found enjoyable settings with higher damping+inertia. Settings try to avoid residual forces (spreading short force peaks over time) from filtering. I hate lag as much as everyone else, but seem to tolerate it better than overly bouncy feeling. After all, softening the force delivery is essentially adding latency, i.e. slowing raising force curve, so it’s a necessary evil in some cases. If you feel like testing rf2 settings below and maybe compare them with other filtering approaches, I suggest trying UFS2000 on some bumpy track like VLM Mid Ohio or Toban. I think that car showcases best the feel with minimizing residual forces.
Some more thoughts on rF2 FFB signal and filtering before actual settings. The signal seems to resonate or otherwise contain quite much action at high frequencies (100-200hz) and usually with very high forces (>15Nm). I can’t see how those kind of forces could realistically be produced to steering column through tires in several corners on every lap if simulation is working correctly. Can’t say if the blame is on how tracks or cars are modeled, or perhaps the physics engine is not stable at certain scenarios, but the fact is there’s quite much happening at higher frequencies and it doesn’t feel good in the steering wheel. I see these portions of signal as artifacts which need to be minimized and most success filtering these out have come from using SimuCUBE/IONI peaking and notch filter. When not making things too soft with P&N filter, it doesn’t feel any laggier than other filters when softened to same amount. P&N filter probably wasn’t originally implemented for this exact use case, but it can be configured with high enough center freq. and it gives decent results, so why not . Interested to hear if anyone has knowledge whether this messes up latency or otherwise does funky things to FFB signal. With these settings, P&N filter is mostly working as low pass filter, and while low TBW would in my understanding do similar LPF, it doesn’t quite feel the same. Using only P&N filter becomes troublesome with cars like Radical or Renault, which would need filtering starting from 100hz (and up to 200hz). They seem to feel better when adding some in-game or Recon filtering than just widening the P&N filter. Then some cars, like McLaren 650s and UFS2000, come by with just filtering sharply around 160hz. If you like these settings, but can’t find your favourite car from the list, try using 650s or Radical settings as a baseline. Most rF2 cars seem to need similar filtering with either one or the other.
I was curious to try your AC settings as I usually run at least for the modern formula cars 10 Recon with no dam friction or inertia. Your setting at least to me felt like the old mmos settings with overall filter set to around 5.
I also run the skippy in IR at Limerock the same and put up with the oscillation for sake of feel.
The same settings also for the USFS2000 in rf2 with ingame filtering turned off again only at limerock so far. Not experimented with the notch settings as it feels great already.
Im not saying your settings are wrong as it all down to preference.
If anybody can point out the downsides to my settings Id be grateful.
Any chance you forgot to label the attenuation of Peak & Notch filter as negative values?
To reduce forces around a given frequency attenuation has to be negative. Furthermore, I’m a bit surprised about the magnitude that you’ve settled in. -25dB equals around 95% of force reduction. Did you also try much smaller values?
Can’t comment on the latency involved depending on the attenuation. I guess the tendency of less filter equals less latency applies here as well.
Havent tried rF2 for ages, so that’s just a general observation.
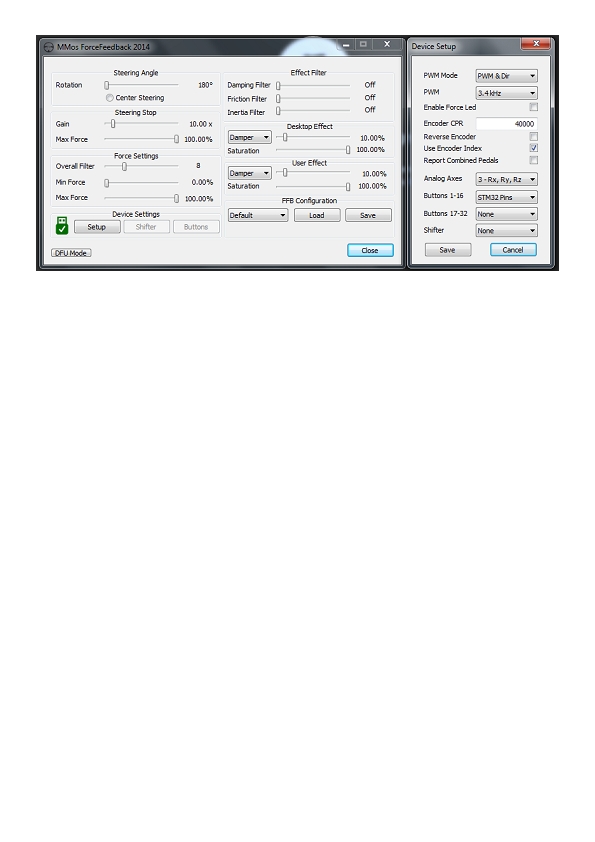
Hello, I have configured my Simucube with Migo Grande motoro.
I attach my configuration to see if you can compare it with yours and tell me if it is well done.
@Ippai, I agree these are matter of preference and personally don’t have real life racing experience other than occasional go-karts, so I can’t say what’s realistic or should be universally preferable. For me using P&N filter gains the possibility to reduce Recon and in-game filtering so that it feels there’s less overall filtering, but still gets rid of annoying metallic feel rF2 has without filtering. When using higher Recon filter levels, there’s no need for >100hz P&N filtering because Recon filtering “smoothens” the high frequency resonances and leaves P&N to be used for taming oscillations if needed (2-10hz). High frequency P&N filtering is also not needed in AC or iRacing as they don’t have similar high frequency noise. iRacing is capped with 60hz FFB signal (360hz irFFB felt quite smooth too with MMOS) and AC either does some internal filtering or is calculating forces totally differently from rF2.
When compared to Recon filter level 10, I feel my settings deliver more subtle road surface and tire behavior information and it’s easier to distinct overall grip levels vs. small bumps and slides reducing grip momentarily. Higher Recon filter levels feel more like having big overinflated and overgrippy tires on a glass surface (there are no small bumps felt, only smooth grip levels) and there’s usually few bigger jolts felt in cornering as grip level changes or large bump is hit. What’s missing is rapid information from tires constantly fighting between grip and slip, allowing small driving input adjustments to be done several times during one cornering. I’m slightly exaggerating differences here for illustration purposes and higher recon filter levels actually felt better than remembered, but I still prefer lower Recon levels as they feel more connected to what’s seen on the screen.
Lag is another part of the filtering and Mika mentioned Recon filter >9 can have more than 20ms of lag. To put things in perspective, I think that’s still better than most consumer wheels are able to do in terms of latency, but because OSW is capable of more, it’s nice to be able to take advantage of it. Lag is playing part in oscillations and with Recon filter 10 they are quite aggressive. With my rF2 UFS2000 settings I can keep one finger on the wheel and that’s enough to prevent oscillations from happening, with Recon 10 it takes good amount of force to overcome. In AC oscillations are problem even with Recon 1, maybe that’s one more indication that there’s some forced in-game filtering.
When creating this chart for my own use, I rationalized attenuation already means “reduction of”, so I didn’t mark them as negative. Double negatives would mean addition and yet we’re reducing the signal level. At least I hope we’re, otherwise I’m making fool of myself with my theories . But, you’re right, when posting the chart here, it would have been clearer if I had marked them similarly in the chart as they’re in the SimuCUBE conf. tool. Hopefully it didn’t confuse things too much.
I did try different attenuation levels and there’re some rows left in Renault’s settings where att. is 20-25dB. Originally I had much bigger chart with not so successful settings and they had lower Q and/or att. values. While -25dB is large enough reduction where FFB noise components aren’t felt, infinite probably wouldn’t be too different from -25dB. FFB noise components get quite annoying again when attenuation is reduced towards -20dB or closer to zero. With current settings the filter slopes before center frequency and removes almost everything at that. Recon or in-game filtering smoothens the signal at higher frequencies where P&N filtering is again losing effect after center freq. This is why I assumed my filtering settings are functioning effectively as low pass filtering and why I have added some Recon or in-game filtering on cars which need lower center frequency. Quick googling doesn’t paint too bad picture for theoretical group delay in notch filtering and lag should stay low on other frequencies than those filtered out, but group delay has some quirks around center frequency and that’s a bit concerning.
Do you use the Gyro setting in AC that prevents oscillation. Like wise I haven’t had any real life racing experience other than karts so I usually set my ffb but what makes me faster as well as feel. Not sure if it makes a lot if difference but I have the 10k encoder. I’m also running the 0.4 version of the firmware as the new one didn’t feel as detailed. But that might have been Placebo





 . Interested to hear if anyone has knowledge whether this messes up latency or otherwise does funky things to FFB signal. With these settings, P&N filter is mostly working as low pass filter, and while low TBW would in my understanding do similar LPF, it doesn’t quite feel the same. Using only P&N filter becomes troublesome with cars like Radical or Renault, which would need filtering starting from 100hz (and up to 200hz). They seem to feel better when adding some in-game or Recon filtering than just widening the P&N filter. Then some cars, like McLaren 650s and UFS2000, come by with just filtering sharply around 160hz. If you like these settings, but can’t find your favourite car from the list, try using 650s or Radical settings as a baseline. Most rF2 cars seem to need similar filtering with either one or the other.
. Interested to hear if anyone has knowledge whether this messes up latency or otherwise does funky things to FFB signal. With these settings, P&N filter is mostly working as low pass filter, and while low TBW would in my understanding do similar LPF, it doesn’t quite feel the same. Using only P&N filter becomes troublesome with cars like Radical or Renault, which would need filtering starting from 100hz (and up to 200hz). They seem to feel better when adding some in-game or Recon filtering than just widening the P&N filter. Then some cars, like McLaren 650s and UFS2000, come by with just filtering sharply around 160hz. If you like these settings, but can’t find your favourite car from the list, try using 650s or Radical settings as a baseline. Most rF2 cars seem to need similar filtering with either one or the other.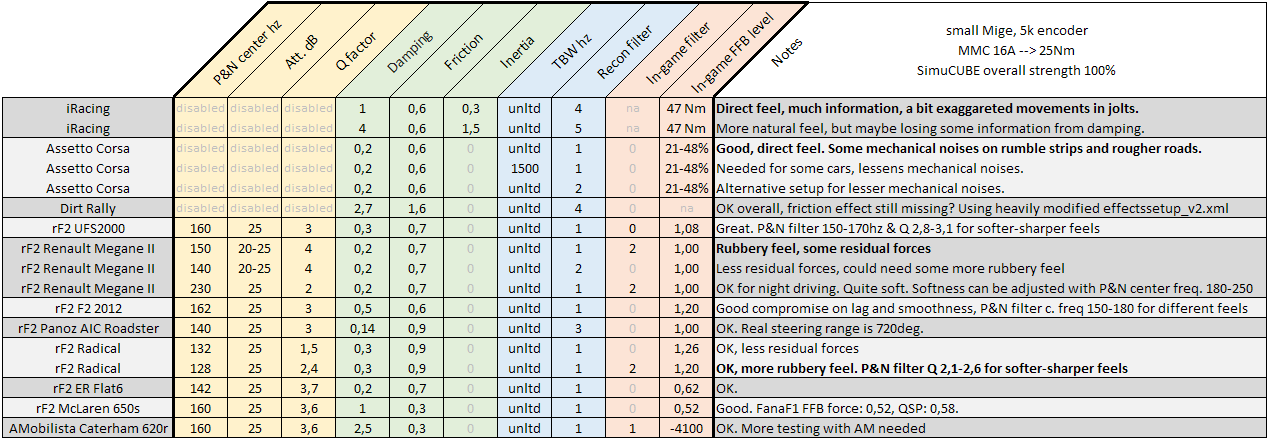


 . But, you’re right, when posting the chart here, it would have been clearer if I had marked them similarly in the chart as they’re in the SimuCUBE conf. tool. Hopefully it didn’t confuse things too much.
. But, you’re right, when posting the chart here, it would have been clearer if I had marked them similarly in the chart as they’re in the SimuCUBE conf. tool. Hopefully it didn’t confuse things too much.