Hello All,
Now that we have the closed Beta out, would be great to provide a screenshot of your settings that you find working well for you.
Also, state whether you like the new FFB experience, and how you compare it vs the older MMoS fw.
I will post my screenshot here in a few hours, when I jump on my racing rig.
A few quick comments:
-
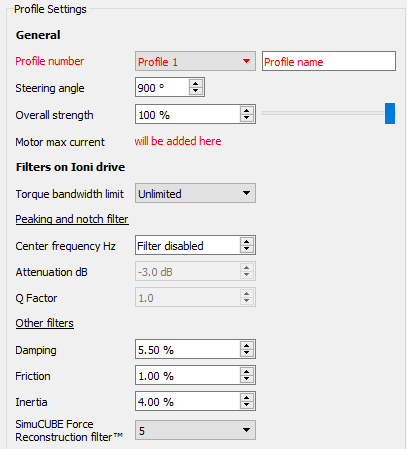
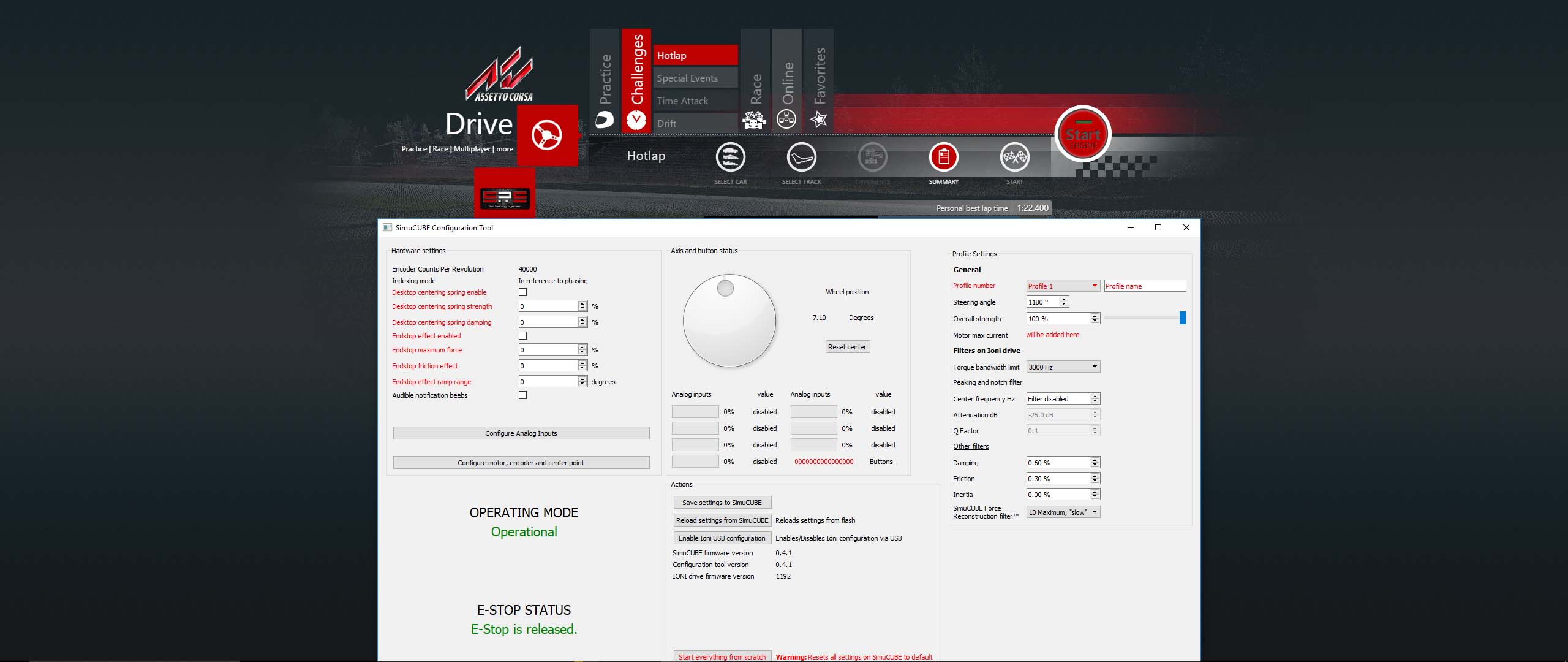
All filters disabled, except damping between 5-8, and Reconstruction Filter at 5 (Fkn Wow, awesome)
-
Compared to the SS2 which is over-smooth and feels like you are either running on overinflated tyres, or, with a new FW option, harsh like the old MMoS OSW feel, the new Recon Filter is a revelation. With the above settings, it feels like real race rubber, and almost no perceptible notching around center. I will induce a slight bit of inertia as well, perhaps 2-3% and see how it goes.
3)Latency: When I switched to the SS2, I always felt a bit slower on average than with my original Lenze SS2, and I had the past 9 months on the SS2, as a good gauge. Now, going back to the OSW, with the new FW, I am up there again, regularly top 1-3 in the AMG around SPA.
No discernible input lag, super fast wheel response and very accurate positioning of the car - pin-point. And this all with using the AKM with a 10k PPR encoder, similar resolution to what many of you are using on the Mige servos. I expect this to get even better once I mount the 1M PPR BiSS servo on my rig…
- Ease of use: The new GUI and the back-end software changes are making setup of the DD setup a doddle. When Mika shared the first alpha, it was very intuitive and no need for him to explain things to me…very logical on how to proceed, but Brion is working on a manual with Mika, that will further simplify things.
But for sure, you no longer need a handy DIY skillset to get one of these up and running, I am sure even my Wife would be able to do it.
Anyway, enough rambling, I will appreciate your comments below!!
Enjoy.
PS: Did I mention it was AWESOME ![]()
Beano
PS: Here are my settings, feels wonderful. No other DD wheel has ever quite felt like this. I luv it.