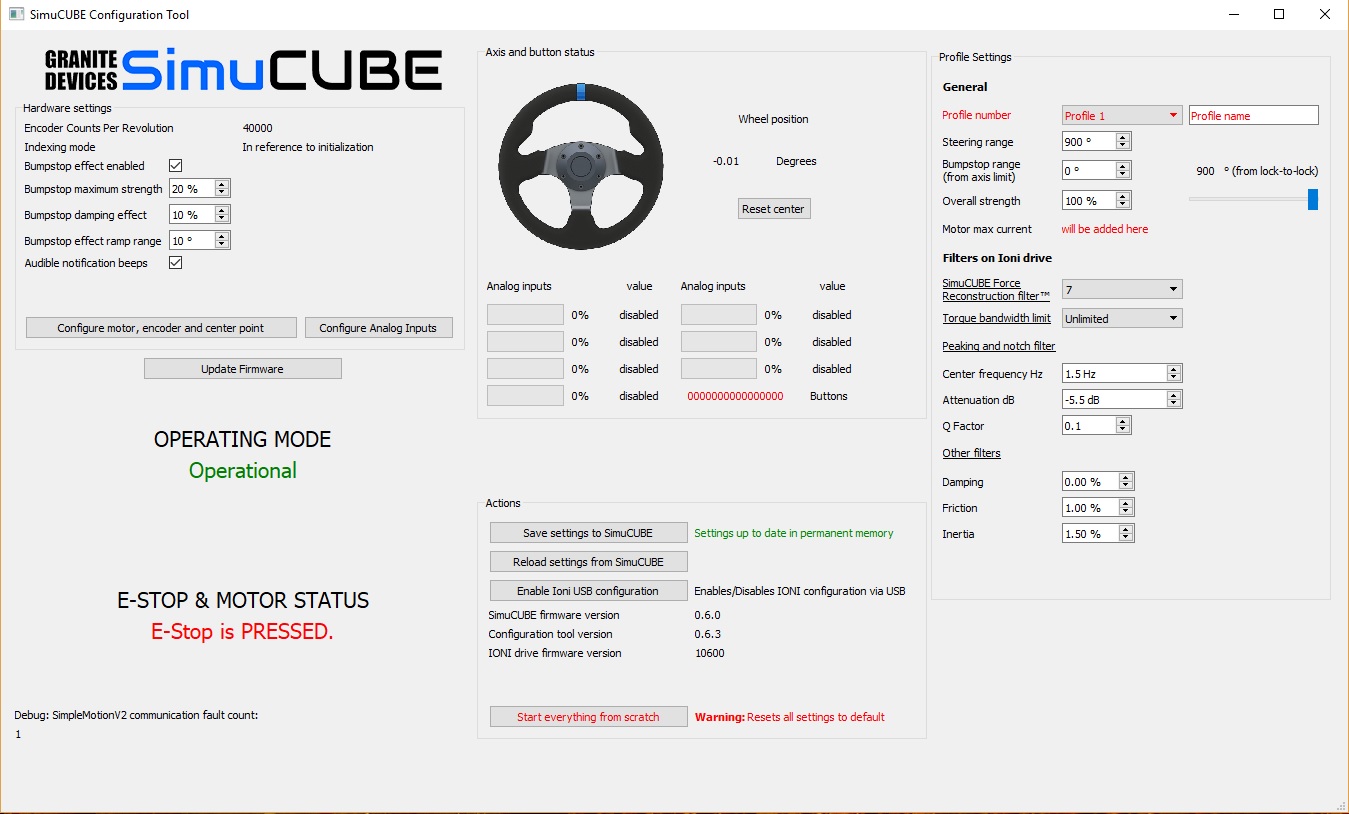
Here’re some settings I’ve ended up using currently. While settings are mostly focused on rFactor2, every sim I’ve tested is better with beta FW than with old MMOS. My settings are work in progress as more testing reveals better things and I just read that guys have further ideas for Recon filter too, so no foreseeable end in tweaking paradise
The feel I’m aiming for is a bit on the active side. I know realistic steering feel is usually more dampened, but without motion rig I like to have all the information possible through steering wheel and haven’t found enjoyable settings with higher damping+inertia. Settings try to avoid residual forces (spreading short force peaks over time) from filtering. I hate lag as much as everyone else, but seem to tolerate it better than overly bouncy feeling. After all, softening the force delivery is essentially adding latency, i.e. slowing raising force curve, so it’s a necessary evil in some cases. If you feel like testing rf2 settings below and maybe compare them with other filtering approaches, I suggest trying UFS2000 on some bumpy track like VLM Mid Ohio or Toban. I think that car showcases best the feel with minimizing residual forces.
Some more thoughts on rF2 FFB signal and filtering before actual settings. The signal seems to resonate or otherwise contain quite much action at high frequencies (100-200hz) and usually with very high forces (>15Nm). I can’t see how those kind of forces could realistically be produced to steering column through tires in several corners on every lap if simulation is working correctly. Can’t say if the blame is on how tracks or cars are modeled, or perhaps the physics engine is not stable at certain scenarios, but the fact is there’s quite much happening at higher frequencies and it doesn’t feel good in the steering wheel. I see these portions of signal as artifacts which need to be minimized and most success filtering these out have come from using SimuCUBE/IONI peaking and notch filter. When not making things too soft with P&N filter, it doesn’t feel any laggier than other filters when softened to same amount. P&N filter probably wasn’t originally implemented for this exact use case, but it can be configured with high enough center freq. and it gives decent results, so why not . Interested to hear if anyone has knowledge whether this messes up latency or otherwise does funky things to FFB signal. With these settings, P&N filter is mostly working as low pass filter, and while low TBW would in my understanding do similar LPF, it doesn’t quite feel the same. Using only P&N filter becomes troublesome with cars like Radical or Renault, which would need filtering starting from 100hz (and up to 200hz). They seem to feel better when adding some in-game or Recon filtering than just widening the P&N filter. Then some cars, like McLaren 650s and UFS2000, come by with just filtering sharply around 160hz. If you like these settings, but can’t find your favourite car from the list, try using 650s or Radical settings as a baseline. Most rF2 cars seem to need similar filtering with either one or the other.
I was curious to try your AC settings as I usually run at least for the modern formula cars 10 Recon with no dam friction or inertia. Your setting at least to me felt like the old mmos settings with overall filter set to around 5.
I also run the skippy in IR at Limerock the same and put up with the oscillation for sake of feel.
The same settings also for the USFS2000 in rf2 with ingame filtering turned off again only at limerock so far. Not experimented with the notch settings as it feels great already.
Im not saying your settings are wrong as it all down to preference.
If anybody can point out the downsides to my settings Id be grateful.
Any chance you forgot to label the attenuation of Peak & Notch filter as negative values?
To reduce forces around a given frequency attenuation has to be negative. Furthermore, I’m a bit surprised about the magnitude that you’ve settled in. -25dB equals around 95% of force reduction. Did you also try much smaller values?
Can’t comment on the latency involved depending on the attenuation. I guess the tendency of less filter equals less latency applies here as well.
Havent tried rF2 for ages, so that’s just a general observation.
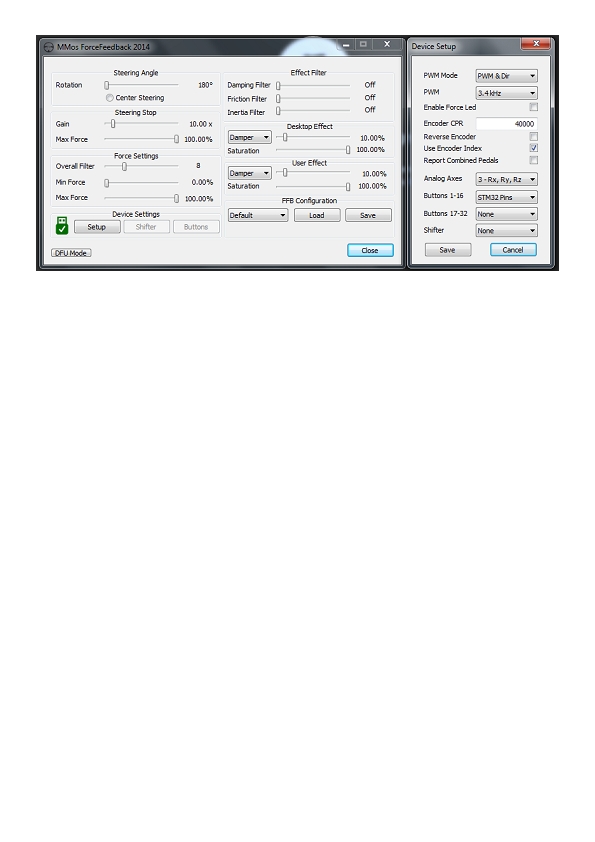
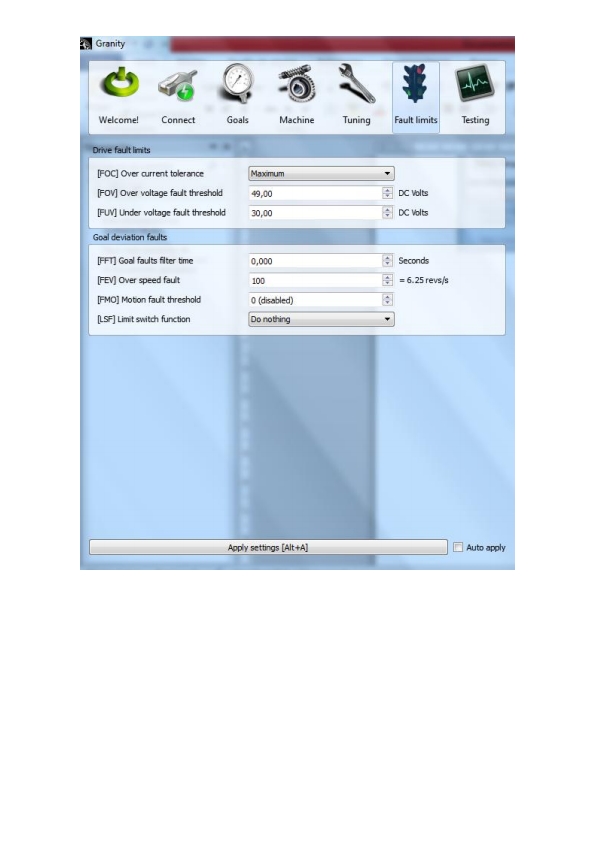
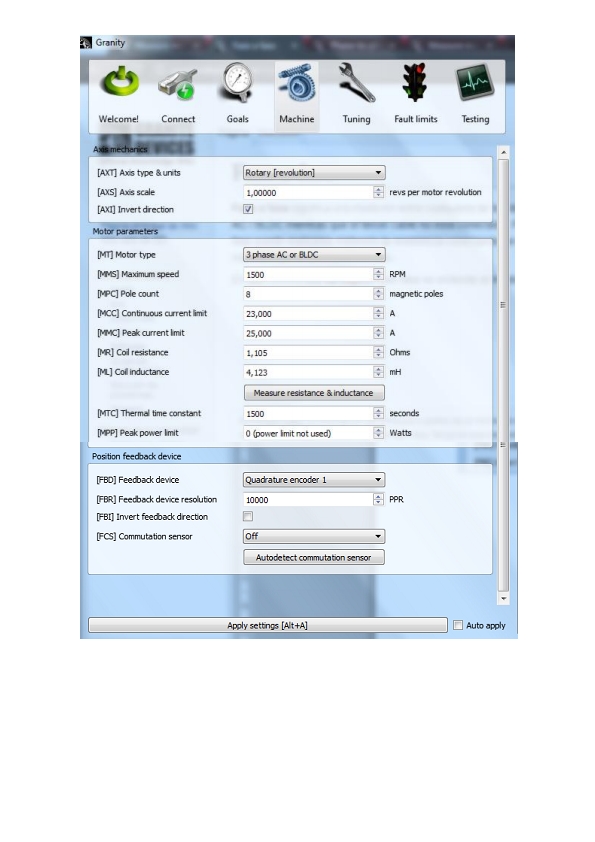
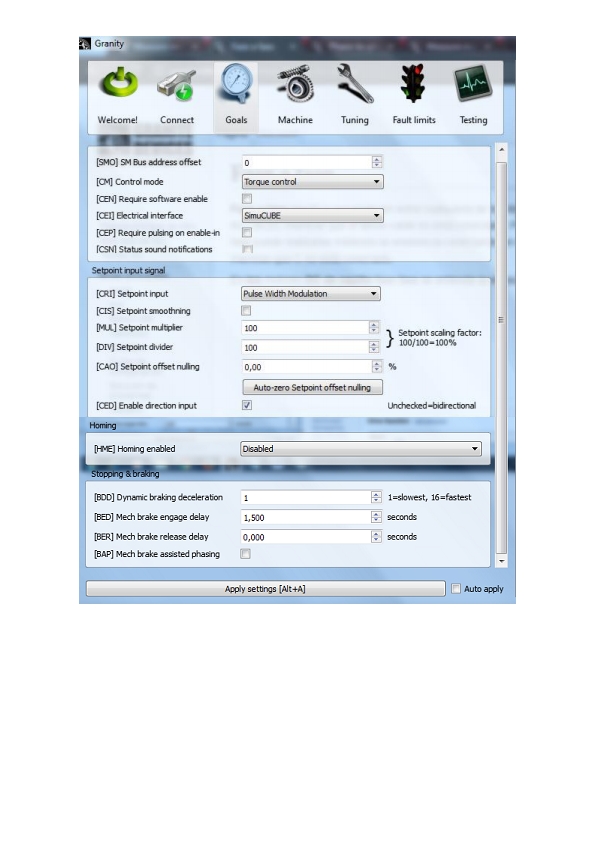
Hello, I have configured my Simucube with Migo Grande motoro.
I attach my configuration to see if you can compare it with yours and tell me if it is well done.
@Ippai, I agree these are matter of preference and personally don’t have real life racing experience other than occasional go-karts, so I can’t say what’s realistic or should be universally preferable. For me using P&N filter gains the possibility to reduce Recon and in-game filtering so that it feels there’s less overall filtering, but still gets rid of annoying metallic feel rF2 has without filtering. When using higher Recon filter levels, there’s no need for >100hz P&N filtering because Recon filtering “smoothens” the high frequency resonances and leaves P&N to be used for taming oscillations if needed (2-10hz). High frequency P&N filtering is also not needed in AC or iRacing as they don’t have similar high frequency noise. iRacing is capped with 60hz FFB signal (360hz irFFB felt quite smooth too with MMOS) and AC either does some internal filtering or is calculating forces totally differently from rF2.
When compared to Recon filter level 10, I feel my settings deliver more subtle road surface and tire behavior information and it’s easier to distinct overall grip levels vs. small bumps and slides reducing grip momentarily. Higher Recon filter levels feel more like having big overinflated and overgrippy tires on a glass surface (there are no small bumps felt, only smooth grip levels) and there’s usually few bigger jolts felt in cornering as grip level changes or large bump is hit. What’s missing is rapid information from tires constantly fighting between grip and slip, allowing small driving input adjustments to be done several times during one cornering. I’m slightly exaggerating differences here for illustration purposes and higher recon filter levels actually felt better than remembered, but I still prefer lower Recon levels as they feel more connected to what’s seen on the screen.
Lag is another part of the filtering and Mika mentioned Recon filter >9 can have more than 20ms of lag. To put things in perspective, I think that’s still better than most consumer wheels are able to do in terms of latency, but because OSW is capable of more, it’s nice to be able to take advantage of it. Lag is playing part in oscillations and with Recon filter 10 they are quite aggressive. With my rF2 UFS2000 settings I can keep one finger on the wheel and that’s enough to prevent oscillations from happening, with Recon 10 it takes good amount of force to overcome. In AC oscillations are problem even with Recon 1, maybe that’s one more indication that there’s some forced in-game filtering.
When creating this chart for my own use, I rationalized attenuation already means “reduction of”, so I didn’t mark them as negative. Double negatives would mean addition and yet we’re reducing the signal level. At least I hope we’re, otherwise I’m making fool of myself with my theories . But, you’re right, when posting the chart here, it would have been clearer if I had marked them similarly in the chart as they’re in the SimuCUBE conf. tool. Hopefully it didn’t confuse things too much.
I did try different attenuation levels and there’re some rows left in Renault’s settings where att. is 20-25dB. Originally I had much bigger chart with not so successful settings and they had lower Q and/or att. values. While -25dB is large enough reduction where FFB noise components aren’t felt, infinite probably wouldn’t be too different from -25dB. FFB noise components get quite annoying again when attenuation is reduced towards -20dB or closer to zero. With current settings the filter slopes before center frequency and removes almost everything at that. Recon or in-game filtering smoothens the signal at higher frequencies where P&N filtering is again losing effect after center freq. This is why I assumed my filtering settings are functioning effectively as low pass filtering and why I have added some Recon or in-game filtering on cars which need lower center frequency. Quick googling doesn’t paint too bad picture for theoretical group delay in notch filtering and lag should stay low on other frequencies than those filtered out, but group delay has some quirks around center frequency and that’s a bit concerning.
Do you use the Gyro setting in AC that prevents oscillation. Like wise I haven’t had any real life racing experience other than karts so I usually set my ffb but what makes me faster as well as feel. Not sure if it makes a lot if difference but I have the 10k encoder. I’m also running the 0.4 version of the firmware as the new one didn’t feel as detailed. But that might have been Placebo
Nice chart… Just a question… I notice you are overdriving the Small Mige to 25Nm I am just wondering how this feels at the top end of the spectrum of power as it is technically beyond the Spec of the Servo… I run the Large Mige at 25A MMC which is about 27.9Nm with about the same iRacing 47Nm setting which comes out to about .598:1 or so in specific wheel output… (yours would be a tiny bit lower but not far off of that).
I haven’t played too much with Assetto Corse abut I have found that the Assetto Corsa Standard Feedback has a significant amount of inertia built into it which leads to a vey active but not as realistic feeling wheel…
Since the powers are so close between yours and mine I will have to play with your settings and see how they feel to me But I can tell you that your iRacing natural feel settings are pretty close to mine though I run more dampening as I have found certain aspects where it seems additional dampening is needed. I am still vetting those out to determine the best methods of controlling them though.
I’m not currently using gyro in AC, but tested it briefly about a year ago (tire model v7 times). It was OK for some cars, but was too dampening for most. If it were per car setting, it could have been more useful, but for me it felt too much like afterthought in most cases. Gyro can play better with higher Recon levels as they kind of level each other, but if you’re using gyro and would like to test smaller Recon levels, I suggest you disable gyro first and then test with Recon 1-2 and small amounts (0,3-1%) of damping + friction.
On the subject of game parameters, one thing in iRacing app.ini that isn’t mentioned yet in this forum is “steerAverageSteeringTorque”. I was having hard time getting good results with settings posted here by more seasoned iRacers, but the culprit appears to be this app.ini parameter I’ve changed from long time ago when testing iRacing with MMOS.
“steerAverageSteeringTorque=1” made steering forces softer (as it averages values) and then adding moderate amounts of dampening made steering even more vague and lifeless. Original and default value is “0” and while that’s discarding five out of six internally calculated FFB values and only sending the last value when FFB update is due (which doesn’t sound as perfection solution either), changing it back gave much firmer feel for the steering and changed whole filter chain behavior for the better. Now Recon filter level 4-5 is showing it’s true potential and GT-cars are beginning to feel great with suggested settings of dampening and inertia. For open wheelers and lighter cars I still prefer less dampening, but the overall feel is closer to what others are experiencing here.
This parameter has been discussed thoroughly in iRacing-forums long before open source firmware materialized, but it’s worth noting how it’s behaving with Recon filter too. For me the default value of “0” feels preferable, but if you’re on this forum, quite likely you too have been tinkering with app.ini and it might be worth checking if you’re getting different results than others. There’re other parameters too, like “steeringFFBSmooth”, but they are more obvious and more unlikely been tweaked by us.
Overdriving small Mige is mostly to have enough headroom for short bursts. Like you noticed my force levels aren’t especially high, but those iRacing FFB levels actually were from testing Porsche 911 with smallish rim (27cm diameter) and I’ll probably will end up with higher forces with open wheelers and GT-cars with correct size rim. I haven’t driven iRacing almost at all lately because MMOS either meant heaps of filtering or like mentioned here “running on Fred Flintstone wheels” . I’m just beginning to start testing iRacing again as there’s obviously potential to be enjoyable with Recon filter. I can post updated chart when I’m getting more familiar with iRacing and new FW settings.
When using force levels over the specs, I haven’t noticed anything weird, just the same nice force delivery as under 20Nm. I used to have 320w power supply and 12,86A MMC, but I quite often noticed IONI power limit kicking in and lowering amperage temporarily to ~10A. Nothing like that happening with 480/720w PSU and 16A, neither does the motor feel like it’s overstressed. As my average force levels aren’t overly high, the motor is only slightly warm to touch after driving sessions even with car/setting-combos that reach shortly but repeatedly over 20Nm.
Just checked on the AC forums the Gyro is much more subtle now with tire model 10 you may want to have another go.
Disappointed to find my steerAverageSteeringTorque was already set to 1. Ive tried the IR settings posted on here but didnt find the settings felt enjoyable was hoping mine was set to 0.
I tried your suggestion about turning off Gyro but both Recon 2 and 10 feel a lot better with Gyro on.
Im starting to like your setting better, I like the vibration from the road surface with yours but love the rubber feel with recon 10. With 9 you have a bit of both but would love to have the best of both worlds with 2 and 10.
Im not sensitive enough to detect the 20ms delay with recon at 10.
There is some oscillation with recon 10 but a light grip is good enough to stop it and only its a problem when u let go of the wheel.
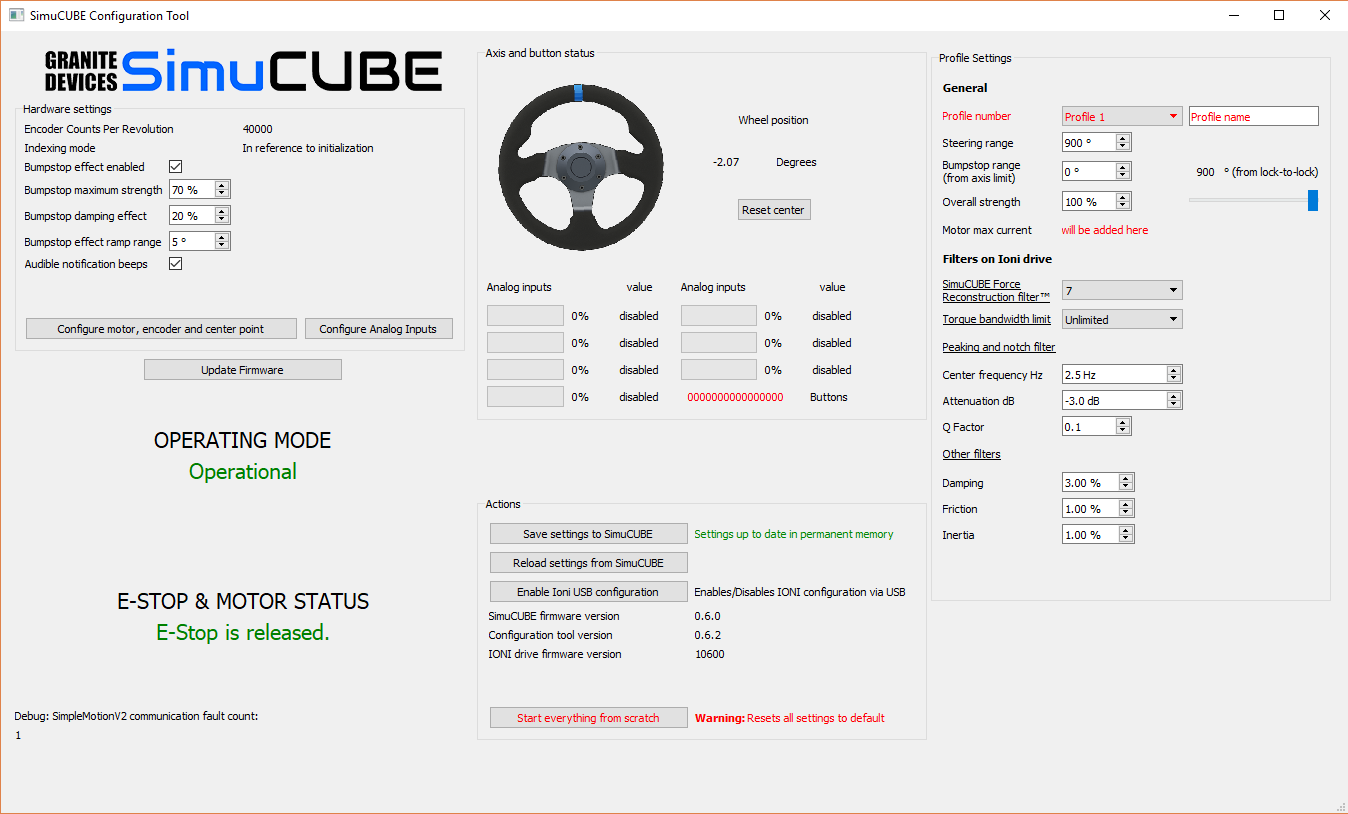
I posted in the bug report thread about not having the same “rubbery” feeling going from 0.4.1 firmware to 0.6.0b while using filter 5. Couple good suggestions were made and I continued to do some tests today. Eventually I found my way back to my originals settings except for TBW and another change in the filter. I managed to get the feeling back by going to filter 7 and it provided the same feel as it did before with 5. I’m not too sure why that is even though Mika has told me nothing has changed between the firmware’s except bug fixing. Here is what I am running currently.
I’ve started doing back to back testing on some of the different Reconstruction filter settings and I am finding some interesting things so far… Basically I have been testing between the 5 and 7 filters currently as those seem to be the most used settings.
my Notes on the #5 filter is that it has consistency in feel, and by signal testing should be the base for natural feed back from iRacing.
However the interesting thing is the #7 - this filter is very similar to the #5 filter in many ways and i can see why many have migrated to it… The main difference is that it imparts a reasonable level of inertia “like” feel to the wheel which lightens up the feel of the wheel in corners that require more turn in the wheel (i.e. hairpin corners) but it does seem to weight the wheel a little more in loaded more consistent corners.
In my back to back A-B-A-B-A testing I found that I was actually faster with #7 but more consistent with #5… So I did some playing with settings…
My starting settings were #5 + Dampening @ 2.25%
next was #7 + Dampening @ 2.25%
I was about .2 seconds faster around the Kansas road Course with the Ferrari 488GTE @ night
My next was to change use #5 + Dampening @ 2.25% + Inertia @ $3%
Still a little faster with the #7 but it closed up a little
Then upped inertia to 5%
and the results were close about …075 difference.
The last test was Inertia @ 10% which seems a bit excessive but at this point I actually ended up faster than the #7 by about .05 but also was more consistent… This point however did show the inertia filters kind of ugly side as it causes a deadness in the wheel when the FFB changes direction as when you turn into inertia it makes the wheel heavier but turning away from the inertia signal makes the steering lighter. this however is not the case with the #7 filter so it is not actually putting inertia in the signal but whatever it is doing is imparting inertia like feel.
Anyway I thought I would just share some of my findings.
BTW 10K Large Mige, .6:1 (60%) specific output, Full Power.




 . Interested to hear if anyone has knowledge whether this messes up latency or otherwise does funky things to FFB signal. With these settings, P&N filter is mostly working as low pass filter, and while low TBW would in my understanding do similar LPF, it doesn’t quite feel the same. Using only P&N filter becomes troublesome with cars like Radical or Renault, which would need filtering starting from 100hz (and up to 200hz). They seem to feel better when adding some in-game or Recon filtering than just widening the P&N filter. Then some cars, like McLaren 650s and UFS2000, come by with just filtering sharply around 160hz. If you like these settings, but can’t find your favourite car from the list, try using 650s or Radical settings as a baseline. Most rF2 cars seem to need similar filtering with either one or the other.
. Interested to hear if anyone has knowledge whether this messes up latency or otherwise does funky things to FFB signal. With these settings, P&N filter is mostly working as low pass filter, and while low TBW would in my understanding do similar LPF, it doesn’t quite feel the same. Using only P&N filter becomes troublesome with cars like Radical or Renault, which would need filtering starting from 100hz (and up to 200hz). They seem to feel better when adding some in-game or Recon filtering than just widening the P&N filter. Then some cars, like McLaren 650s and UFS2000, come by with just filtering sharply around 160hz. If you like these settings, but can’t find your favourite car from the list, try using 650s or Radical settings as a baseline. Most rF2 cars seem to need similar filtering with either one or the other.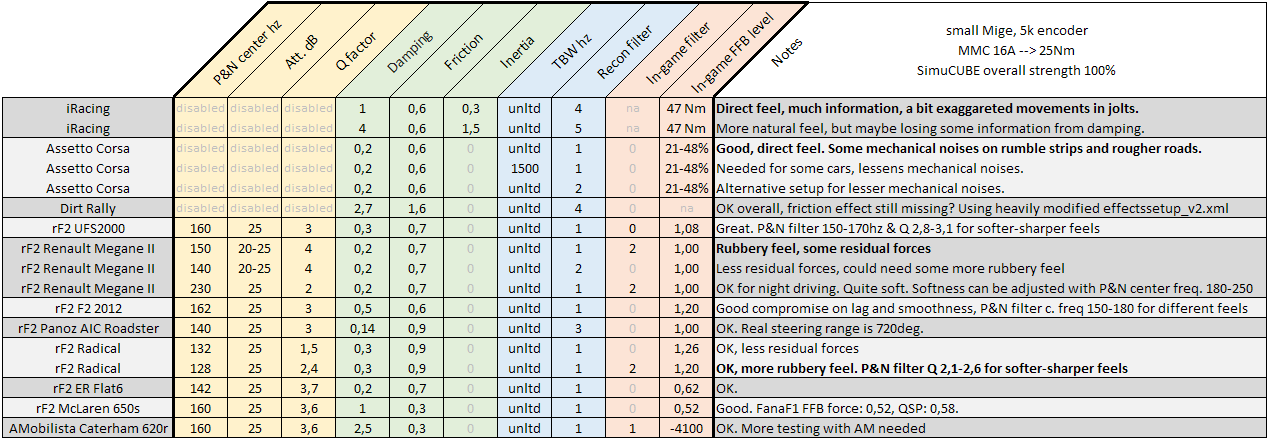


 . But, you’re right, when posting the chart here, it would have been clearer if I had marked them similarly in the chart as they’re in the SimuCUBE conf. tool. Hopefully it didn’t confuse things too much.
. But, you’re right, when posting the chart here, it would have been clearer if I had marked them similarly in the chart as they’re in the SimuCUBE conf. tool. Hopefully it didn’t confuse things too much. . I’m just beginning to start testing iRacing again as there’s obviously potential to be enjoyable with Recon filter. I can post updated chart when I’m getting more familiar with iRacing and new FW settings.
. I’m just beginning to start testing iRacing again as there’s obviously potential to be enjoyable with Recon filter. I can post updated chart when I’m getting more familiar with iRacing and new FW settings.