bumpstop range is, at the moment, exactly where the bumpstop reaches 100% strength.
1 Like
I find the hard bumpstop can violently bounce back so use medium. DOR is 900 and bumpstop range 920. This starts the bumpsop effect at ~443 deg past centre and is pretty strong by 450 deg but doesn’t hit max till 460 deg. Seems the best compromise to me for a slightly softer bumpstop but without limiting the range of freedom too much.
1 Like
I found that is impossible to calibrate the full axis with the soft bumpstop setting, it won’t be possible to turn left and right all the way untill the end and having it to be registered correctly. especially when dealing with narrow dor like 360°.
apart from this,are the TD default profiles ever gonna be reviewed and updated? they never changed since release.
For medium bumpstop hardness seems like I need 32 extra degrees to be able to hit full DOR.
2 Likes
Calibrate with the e-stop pressed
2 Likes
I’ve got this strange thing happening on every start of td,the save settings button flashes even if i don’t change anything. does that happens to someone else too? wasn’t happening before with 2020.4
-
have there been and are there going to be any updates on the FFB itself? I see work has been done on improving the UI, fixing glitches, etc. but what about FFB itself?
-
what about the last couple firmware updates? Any FFB updates included in recent FW updates? (no details are given regarding the FFB updates)
-
any new options / effects / filters in the pipeline?
-
any info on wether there’s been looking into possible game-telemetry based filters/effects (such as an ability to adjust specifically the SAT behavior, road noise/effects, slip effects, engine revs, etc. - all of course being based off actual game telemetry/physics)?
-
any idea when the “non-linear force saturation” effect/filter will be given to us? It was mentioned on the Simucube 2 advertising pages. I’m desperately waiting for a FFB linearity/sensitivity option (in both directions, positive and negative curve)…The filter doesn’t have to be super detailed, I’d be happy even if it was basic and only offered linearity for all/overall forces along with a pre-determined & non-adjustable curve-shape (that curve being adjustable from something like -100 to 100 with 0 being default linearity)…
-
We are working on a few UI improvements still, but haven’t forgotten FFB.
-
No FFB changes recently. If there were, we would have written to the changelog.
-
Some new filters are in pipeline, but very limited number in order to not get the device impossibily difficult to use/tune.
-
Game telemetry based effects: On idea stage.
-
Non-linear FFB (gamma filter) is in Simucube 2 Ultimate.
1 Like
hi all, so I added the “tray” command to the TD shortcut, it works as intended but most of the times if I launch TD from the tray it hangs, and I am left with Task Manager to close it.
am I doing something wrong maybe?
Was it really necessary to remove the old bumpstop settings? Now Hard is too hard and too bouncy and Medium is too soft. The old settings were perfect.
We analyzed the telemetry to get an overview of what type of settings people were using in general, and then made three distinctively different feeling bumpstops settings based on the range people were using.
It was also evident that people were using low bumpstop strength, and then complaining about how the FFB forces could overcome the bumpstop forces. That caused us to think about this a bit, and we didn’t not find one single, convincing and reality-based reason on why the bumpstop strength should not be anything else than 100%.
We will adjust the settings again in the future. So far, the feedback has been that the Soft is already too hard, i.e. exactly opposite on what you are suggesting.
1 Like
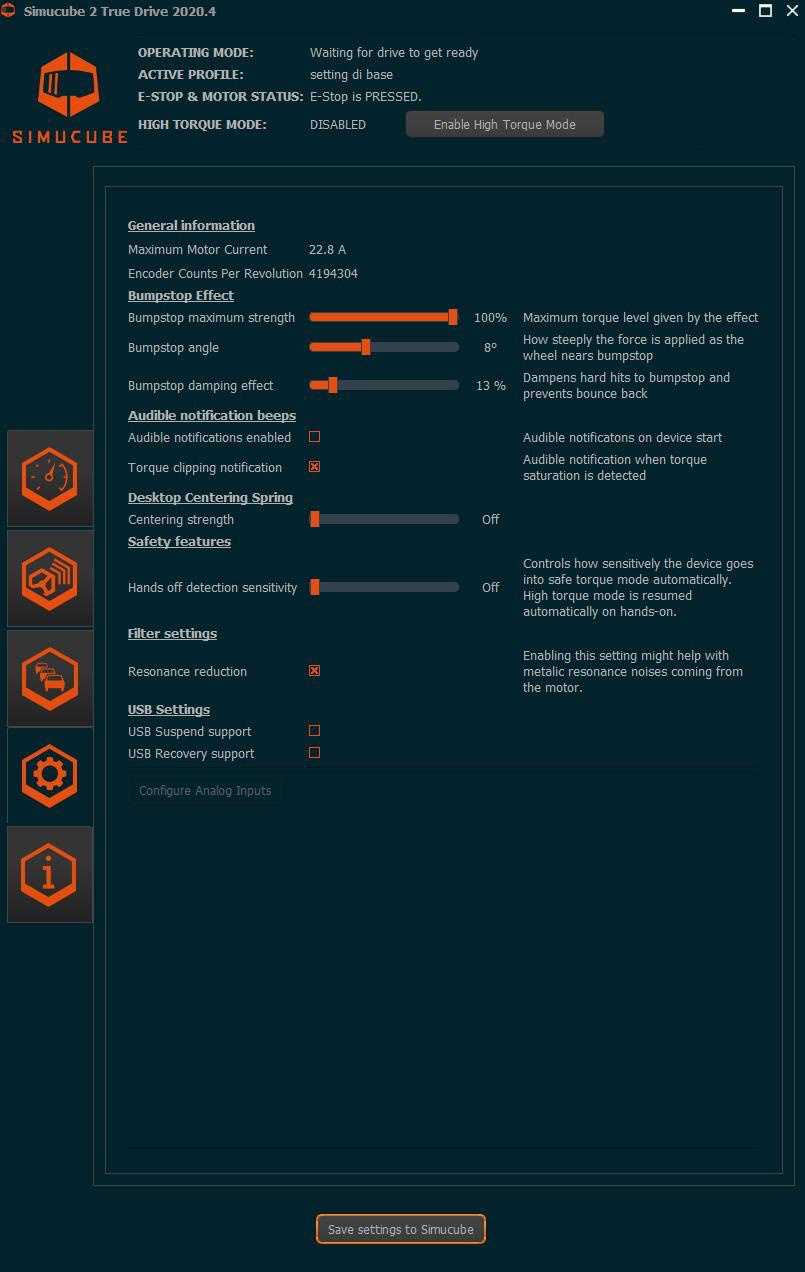
Just for information, my old bumpstop settings were as shown in the picture and felt perfect to me.
In my opinion, the new settings have no place in this interface, because they are set once in a lifetime and then never again. But doe what you can’t leave. For me, it wasn’t necessary, but who am i!
The filters have an effect on the bumpstop too. If you have Slew Rate Limit set quite low try raising it or setting it to off. High recon filter also seems to make it more bouncy. ULL at 5 works better than higher too.
1 Like
Indeed, true.
We have two signal paths available. Perhaps the bumpstop force should go to the path that does not get filtered on the servo drive 
5 Likes
you are so right, i tested it and it feels ridiculous. I hope that this will be fixed soon.
Maybe it would be better to just roll back and leave this setting where it was.
Hi! Is there any device damage possibility if my wheel settings is clipping from 1 to 5% regularly? This settings is ideal and have the most informative feedback, but i have regular clipping. Also there is no way to make more recon filter, i don’t want to do this. I’m driving iracing. The real question is only about wheel longevity
No damage possible by clipping.
3 Likes
Thank you! This is great. I can drive Like a mAN 
Hi Mika,
After having now had the SC2 pro for a good amount of time it has become a problem for me that the Simucube’s scale the output the way they do.
Basically it is the strength of the motor that is adjusted when lowering the NM in TrueDrive.
It is a shame since it means that lowering the NM in TrueDrive leads to worse feedback than lowering the in game settings.
This means that I cannot limit the output as I wish to do for safety reasons, since it cripples the output quality to do so(at the lower forces).
For example running at ~10NM right now feels vastly worse(at the lower forces) than running at the full 25NM, but with corresponding lowering of in game ffb settings.
It would be much preferred, from my perspective, that you always run the motor at same strength, but then scale & clip the input signal instead.
Is it possible that you will either change the way it currently works, or that you will add an additional strength control or a way to toggle between these ways of doing it at any time?
Cheers,
-Karsten
The FFB strength setting (from device driver / control panel and from in-game) have always worked the same way as Simucube does it. However your feedback is noted.
1 Like