Beano, perhaps I did not express myself clear enough in my last messages.
Yes, you are absolutely right, MMOs did not control amperage, we set it in Granity, but it did have gain control that operated at the signal level
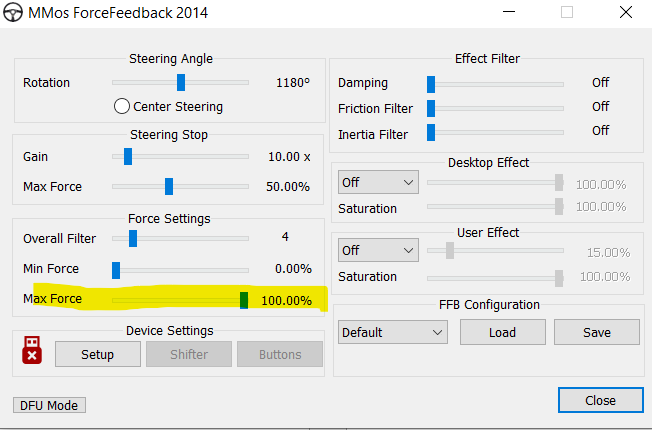
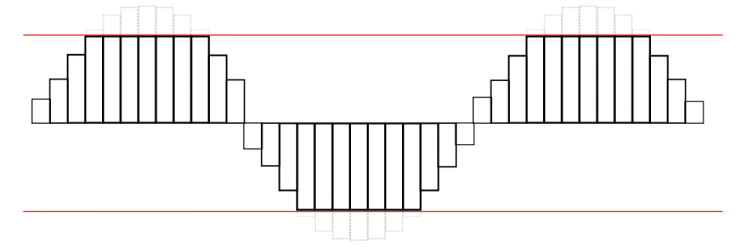
With SC1 (and SC2) we have lost that additional level of control and could limit max force via amperage only which could potentially lead to the issues with hardware clipping.
Simagic for instance allows both, amperage and signal level control in their RaceManager.
Would having that extra level in TD help with HW clipping?
For most titles that have proper in game gain control (e.g. AC, ACC) this is not an issue, we just max out TD max force and limit signal strength in game. But some, like DR2 for instance, just don’t have control for overall gain, so we are forced to lower amperage in TD thus creating conditions for HW level clipping.
Hope that makes sense.