To me it looks the only difference is the amount of torque it gives.
Seeing that people turn down their pro to a lower amount even lower then the sport, what is the benefit of having a pro ?
Am i missing something ? I dont mind giving extra cash but not without a reason.
If you have both setup at the same torque would you feel the difference ?
somehow related to that matter :
I currently own a Sport, the best wheelbase I ever owned in all those years, hands down.
the only thing is that, coming previously from an OSW 20nm, I sometimes feel the need for some extra headroom, in situations where I find myself having to find a compromise bewteen what I would like to feel and what the motor can actually deliver to me at its 17nm max capabilities.
Now, given the fact that the Ultimate is way out of my range - for its price, not the 32nm for sure - I find always more often myself wanting some more torque in my hands, and for sure the 25nm of the Pro would come very handy in that scenario (yes, I am high ffb force lover!)
Also, I am waiting for a Simlab P1-X with front mount, so there will be no issue in handling that level of power.
In conclusion, do you think it might be worth swapping the Sport for the Pro, for all the reasons I just told?
I also have the idea that, being a more substantial motor, it would be less twitchy than the Sport (or at least that was the general rule with MiGe motors, where less torque always meant more twitchyness in hand).
Let me hear your thoughts guys
i m wondering , plz explain, what is “headroom” i see it here on this forum popping up but i have no clue at all what you guys mean with it ???
Also , im in the market for a simlab P1 X , but what is that what you are saying ? with the one that is out today, its a problem to have it with the Simucube pro ??
When will that new simlab come out then ? any intel ?
“headroom” might be explained as the amount of torque you may have at your disposal before reaching clipping. having more of that allows to run higher levels of torque - as high as desirable - without clip the signal.
as for the P1x, I don’t understand your question; it is the best and most sturdy and rigid 80/20 rig on the market at the moment, especially with the front mount option they offer.
I don’t see any new rig on the horizon by Simlab, the P1-X is no doubt the flagship rig now available to sustain with ease any powerful dd motor. but I don’t understand your concern about that. just get one if you’re thinking about a profile rig, you won’t find anything better at the moment.
One explanation brings up another question:-) what is clipping ?? Can you explain headroom and clipping in an example ?
I am going to buy the p1 x from simlab as its my favorite. I was not concerned about that. But in your reply you said that you were waiting for simlab to bring out the front mount. Thats why i thought there was an issue with the high power from a simu pro and that p1x. I understand now the mistake. Was mis understood from my side
Clipping is when game sends out more FFB signals that the wheelbase can handle, it cuts off/away detail and you will loose FFB details when you drive. Most game has FFB clipping meters so you can see and adjust it to not clip. Some minor clipping is fine in some cases, but if the bar turns RED often, lower the FFB force.
You can compare it with audio/music. If you play music to loud on the stereo and the speakers can´t hande the high volume, the audio will get clipped / distorted and sounds bad. Often the high and/or low tones.
Also, different tracks / cars produce less or more clipping even on same base settings. Monza clipps less then for example Nordschleife that has massive kurbs and a lot of up and downs and some jumps…
Clipping is always in the signal, when it gets to 100%, you get flat, no details output.
Wheelbase does not clip.
Advantage of more powerful wheelbase is that you can lower in game gain, thus having more headroom, while still generating strong feedback as wheelbase can amplify lower level signal, like a power amp.
That’s not true. You can clip at either end. If you over power the wheel base you will get the exact same result. Just a heavy dead wheel. Its really obvious on lower powered wheels. If theres no room for the wheel base to produce another signal the same thing happens.
If you ask for too much current, servo should handle spike up to peak current for 1 to 2 second, before throttling down at which point it will be limited by continuous current.
But usually this result in some fault (over current I believe).
More info here.
It is rare situation, esp. with already pretuned SC2 but possible esp. as SC1 and I most likely SC2 use MCC for max force control.
In MMOs/Granity days we used to set MCC to max amperage motor can handle and were managing max force in MMOs that was limiting signal strength.
On daily basis we mostly deal with signal clipping, I personally never experienced clipping at hardware level.
But yeah, agree with your point.
May be Mika could chime in with better explanation.
MCC for continuous, MMC for peak (1-2 sec), I remember that. Good old days.
What was the rule of thumb, MCC 0.1 lower than MMC?
Guess if TD used same old approach with MCC/MMC at max of servo capacity and was limiting force at signal level, HW level clipping would have been thing of the past.
I remember Mika was motivating removal of this extra level of force control in SC1 to simplify things.
Simagic (Chinese DD brand) is actually using this multi stage approach.
They have Mechanical Total Force (amperage, I assume) and separate setting for Game Force, Constant and Periodic
MCC can actually be a lot lower than MMC, no issues. And mechanical time-constant is anyway dependant on servo, and a variable inside the IONI/Argon setup parameters, has been there since day 1.
So it can be set to whatever is specified by servo-manufacturer.
Wrt the Simagic wheel, most, if not all, plus then some, filters are already covered by Simucube2. They use different naming conventions.
Like said before, there’s a reason SC2 is the flagship dd wheel, it will be a while before it will be dethroned. I have commented before that we are truly at the pinnacle dd wheel engineering with this, next big steps to significantly improve ffb will have to be in moving away from Microsoft DI and doing custom driver API.
Also, where iRacing is concerned, there needs to be development wrt 60hz ffb signal. But that is another topic for another day, imho, even with the low update rate, it’s ffb is still better than any other candidate sim out there.
Alessandro, i have the pro and i can confirm to you that anything above 65%-70% torque is practically unplayable and this thing wants to kill you anyway. I have sprained already a couple of fingers and hurt my wrists at 50%-60%… I don’t have any experience with the sport but seriously i cannot think of any cases where i would want to use torque over 15nm and believe me i like strong ffb. As far as the clipping, i may have noticed some cases but at less than 45% strength. You may have to reconsider your in game settings. Regardless of what i think, if you find yourself in clipping situations, or simply the force strength of sport is not enough for you and you do not enjoy it as much as you would want to, then it might make sense to swap it for a pro if you are not going to lose some serious money.
About the twitchyness in hand, i am not sure i understand what you mean. The pro can be very twitchy (robotic feeling maybe?) as well, but this can be easily fixed with some friction/inertia and other filters. Personally i went for the pro simply because the price difference was not that significant from the sport. For me as well the ultimate was out of range…
I would not change either. Unless you get good money for the Sport and you have extra money lying around. I changed from SC1 Small Mige to SC2 Pro and it was not a big jump really. And i would choose the Sport over SC1 SM.
Thanks Beano for reply, although you didn’t answer my question on controlling signal in TD like MMOs did. That should have been helpful for some titles that have no proper control for that in game forcing us lowering amperage that could result in HW clipping, overcurrent fault, etc.
Custom API, that’s like going back to pre MMOs day. Unified interface is always better than proprietary thing. I understand that there are limitations. May be telemetry based feedback is a better way.
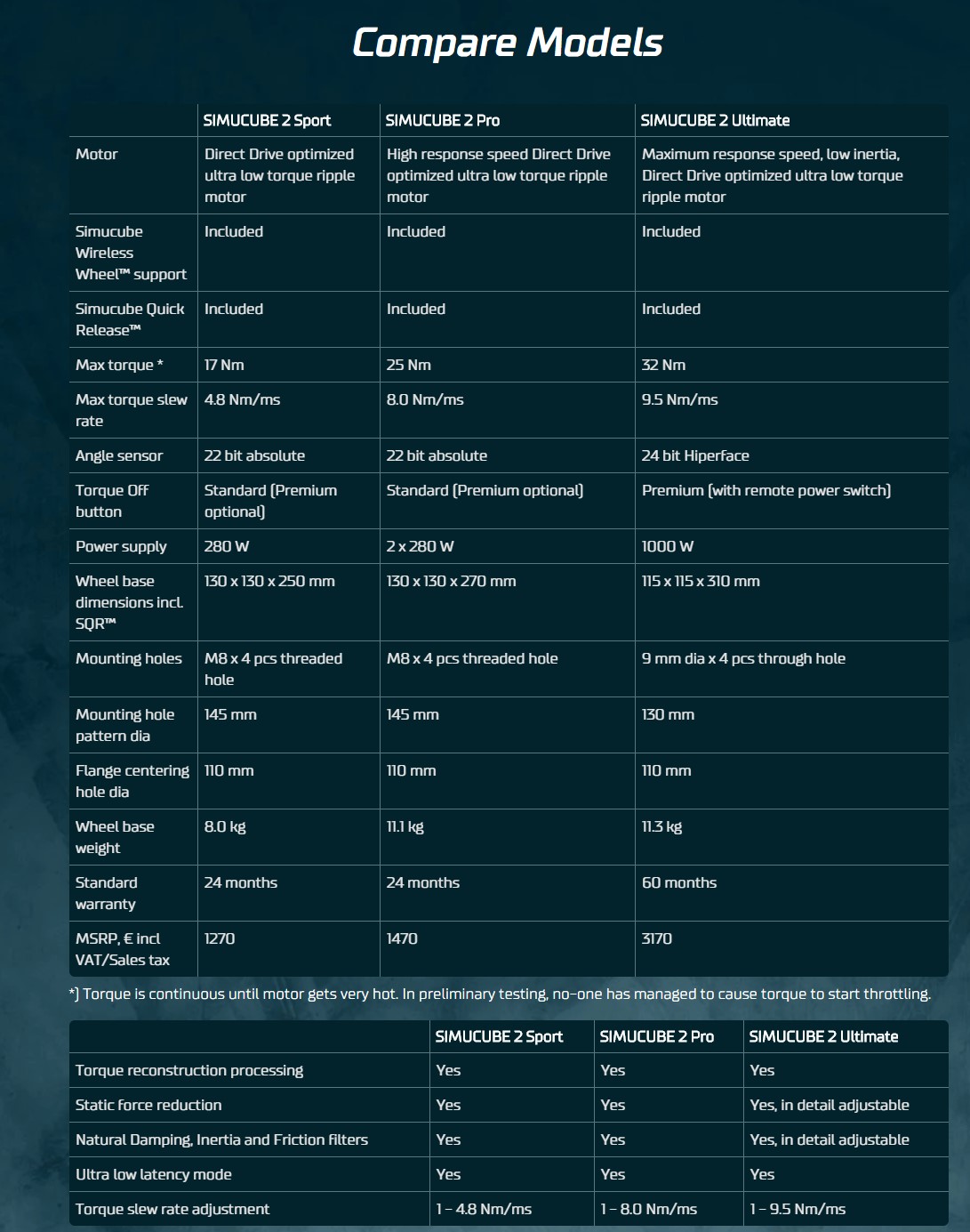
This is comparison matrix between models. Besides extra 8 Nm torque (too bad we have to deal with additional PSU for that modest power increase), Pro has double slew rate of Sport, that is can track and react faster. Plus motors are different and we don’t know all their characteristics.
I don’t know what is the current price difference between these two, I personally went for Pro, the whole existence of nearly identical Sport model with almost the same price never made sense to me.
I am sure you will be happy with either, except may be questioning yourself later “what if I went for …” https://www.simucu.be/sc2pro-direct-drive-wheel-base
MMoS did not control anything on controller-level, all it did was intercept ffb data, manipulated it to correct format and sent pwm setpoint-signal to drive-controller (Argon/Ioni).
All smarts otherwise resided on the drive-controller. The interactions in SC2 is far more involved and substantial than the old MMoS communications. Like said, MMoS was good for its time, but has been superseded by a far more advanced interface.
I am currently retesting an old Argon, it just feels ancient compared to SC2, all truth be told…and so it should too.
Wrt internal communications methods on SC2, I know enough to get by, but I won’t share those things outside of GD. My apologies for that.