Mika already gave some feedback above as to why, here is a comment I made on the same topic on iRacing also. Just because people have been using the test for years, doesn’t make it any more meaningful or accurate.
[quote] To be totally fair, like said on GD forums too, we cannot use these tests in random environment like this, way to many variables.
The only way to conduct these would be in a controlled environment - same pc, same USB ports used, same Windows environment, as well as same wheel-rim, as wheel-dia and relative weight will all massively impact these results. For example, I have a small 4nm 60mm Mige servo here that can run 1000rpm at 48Vdc that will destroy any other servo on that list posted on GD wrt acceleration, I will guarantee that…but, as a DD wheel, it is totally useless.
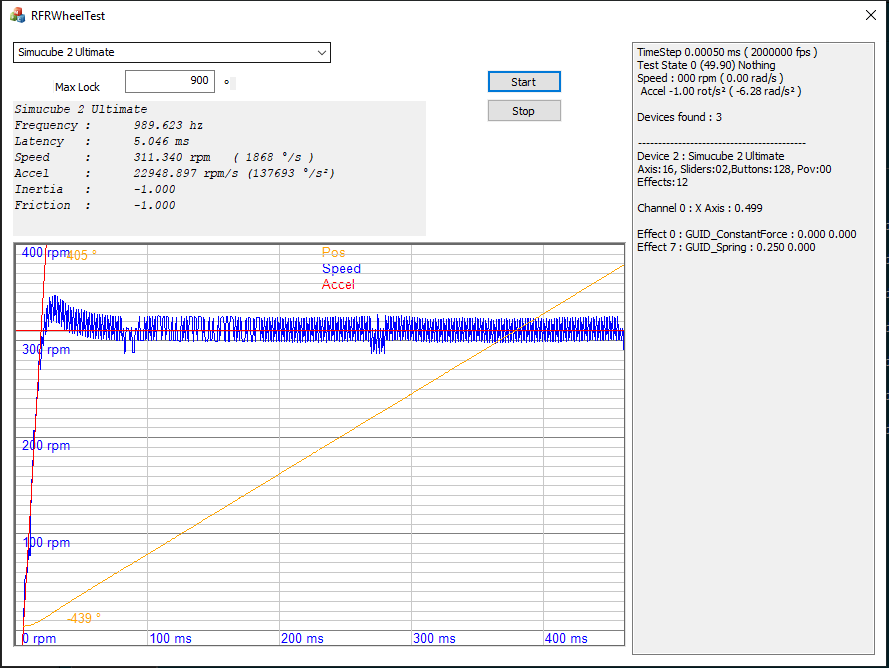
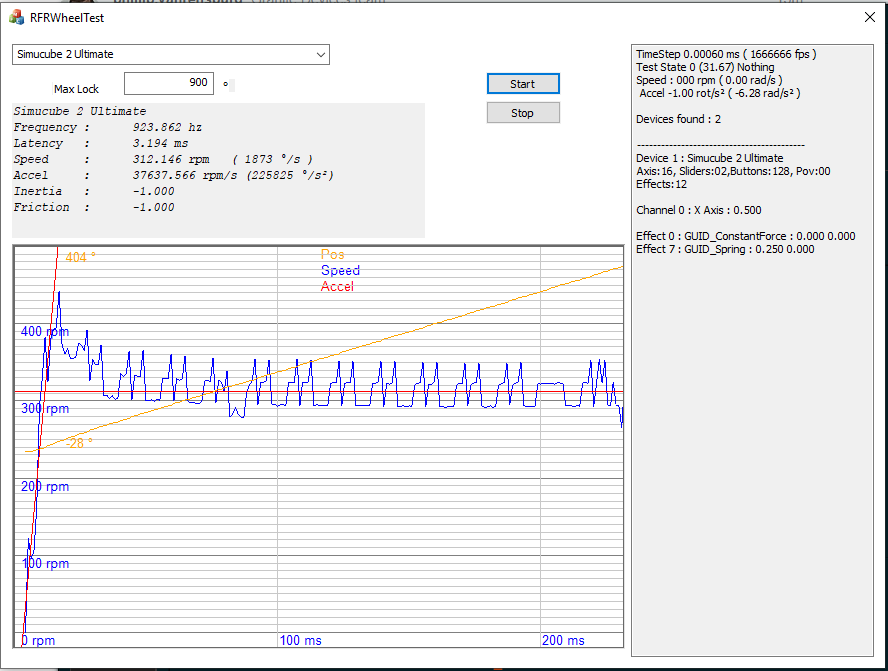
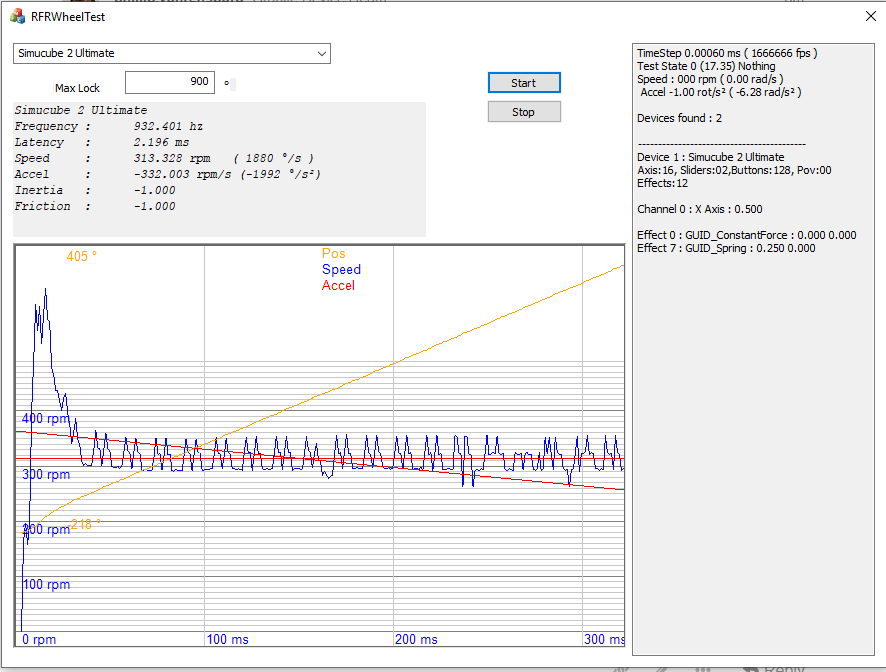
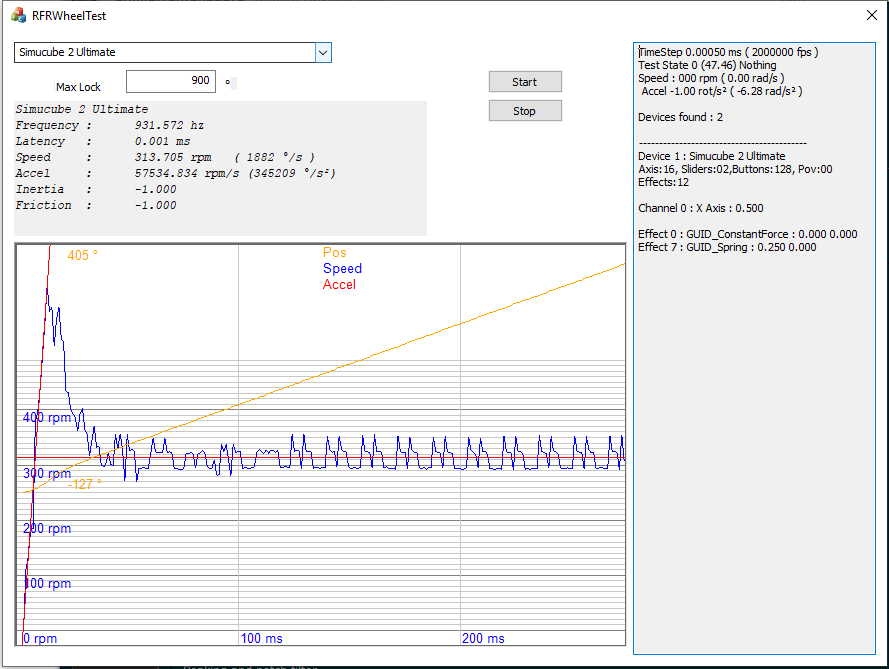
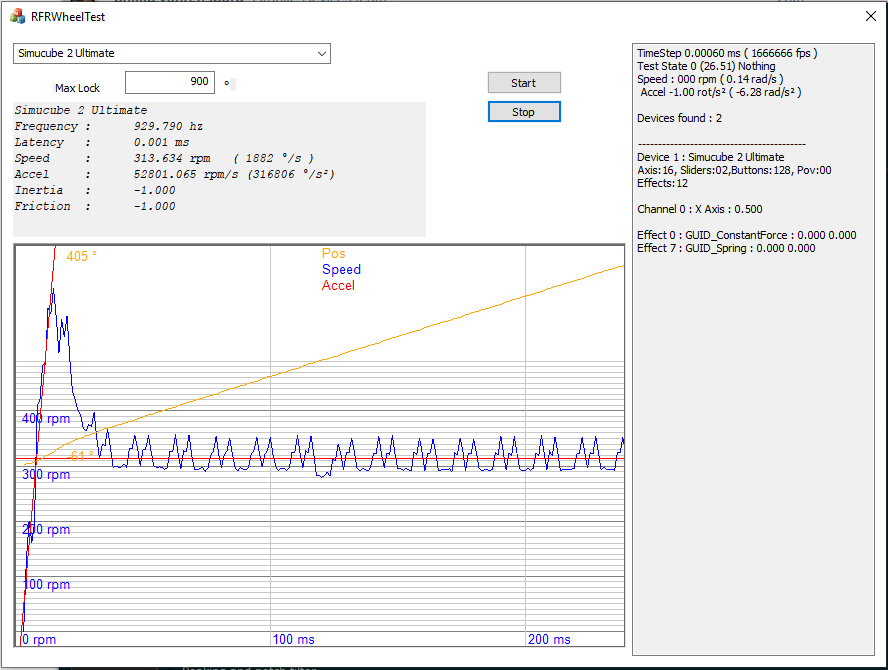
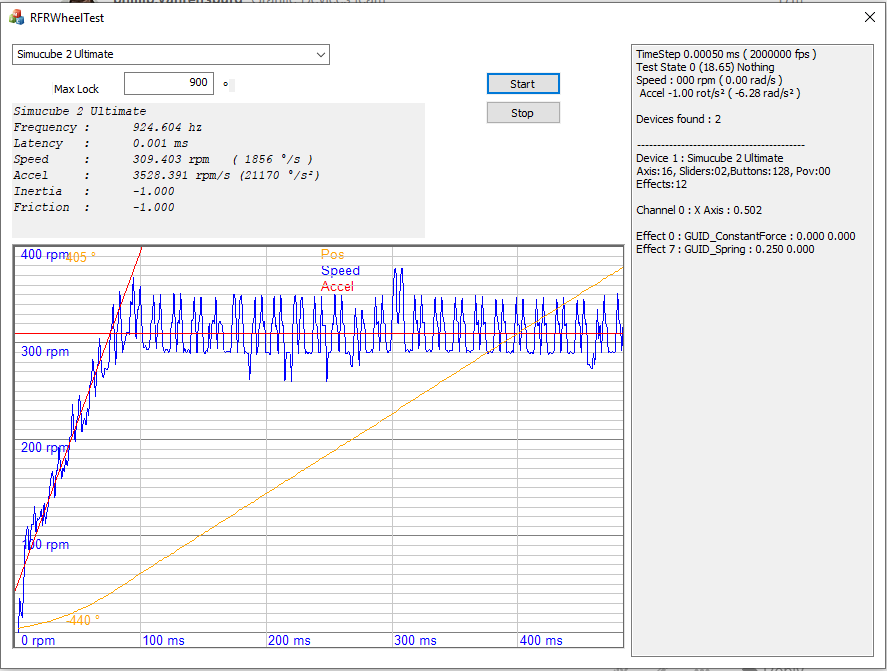
Anyway, I have mentioned to Thomas during my early beta testing that I thought the wheel was to active and sitting on the limit wrt stability, what we call quarter-wave damping tuning… that response-behaviour confirms it to some degree, but it is something that can be corrected by proper low-level tuning.
Again, above just a simple observation, like said, if you want meaningful results, it might be much wiser testing all servos in same environment, perhaps even without any wheel-rim attached, then we might be able to draw conclusions from that.
But, in reality, there are better ways to test the response-behaviour from the servos themselves, as well as isolate the performance of the drive-controllers, USB HID et al…these software test-progs are not good enough and results will need to be taken with a bag of salt ![/quote]