We are investigating this and other similar fault conditions.
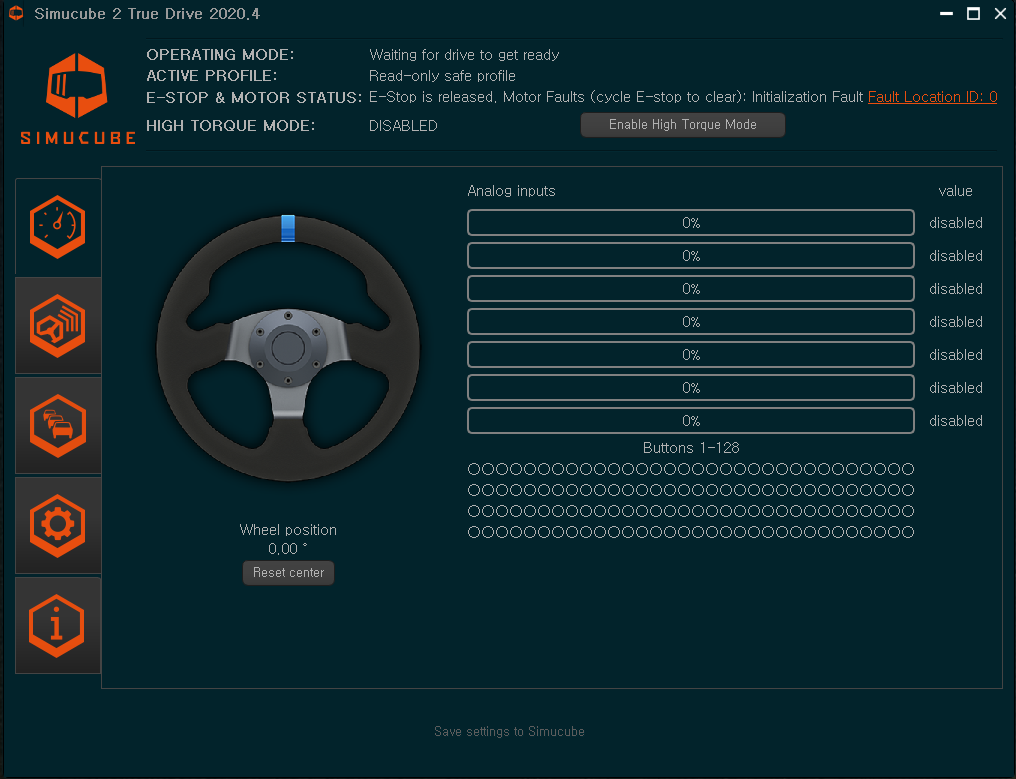
“Fault 0” is just a reading of an unitinitailized fault number while the system is waiting for initialization to complete. Next firmware update will read the fault code in the loop as well.
The system at this point has energized the servo drive and tries to make a zero-current measurement of the current driven to motor coils. If there is electrical noise, it won’t initialize. Also, if the current measurements fluctuate a lot (motor is turning), it will not initialize and also gives an overvoltage fault.