I tried the settings, but I do not find much, but I think it’s also a car problem. Which car and track do I have to try to test?
No I was told about them when i ran him the other day .
Email/Phone Jed sure he can help you i am going to get one. He sells allot of OSW kits some bulk orders for clients 30+ 
So very knowledgeable on latest kit options
easy kit to fit by yourself too
and for me he UK based so no big import shipping costs 
Thank you Simon.
If you happen to learn the brand please let us know.
I assume these are chineese made Sin/Cos encoders.
I Race URD C7r so test on that
Hi Simon, i have weird oscillations on my wheel ( large Mige ), i just copy the “json” file in the right path, but what about the in game option.
For example , i have only 540 degree on the wheel…
thx in advance
Sam
@Simon_Jones is your man for rF2. But what I do know is that you have to match the wheel degrees in Mmos or SimuCUBE to the cars’ degrees. I had different profiles for different cars.
Thx Simon, still problems with the degrees in game… only 480 and terrible oscillations…
got filter in game at 5 to 7 i am Using URD C7r on Spa FSR2016 V3 not tried many other cars as been racing this mod and car for a while
no noise for me in new firmware too you could try these not sure why you get that i’m on small midge 20nm 10000 ppr inc and the pro not the HC board
silly question sure you do have it like this but 450deg in Simucube, 450deg in game setting and 450deg in car the setup near 15 if deg not shown in deg in setup for car ?.
Not silly at all Simon, probably mine 
I will check in game set up…
thx for your help
Sam
ps Big mige 10k ppr Ioni Pro HC
1 Like
Hi been told that Mige will be doing the encoders as a special order so you can order your Mige with the 2048 Line SinCos Encoder Upgrade pre fitted.
Think you cam order them from Today
Hi Simon , I found the time to investigate a little bit, but can’t figure out . I checked also in the set up of the car ( the corvette ) i have 480 deg. When i start to drive the wheel start shake like a bull left and right…
no idea … 
quick update: I upload the “accuforce profile” match the degrees to 480 in the simucube tool , finally something start to work well…
Sounds like wheel forces were reversed in your old profile
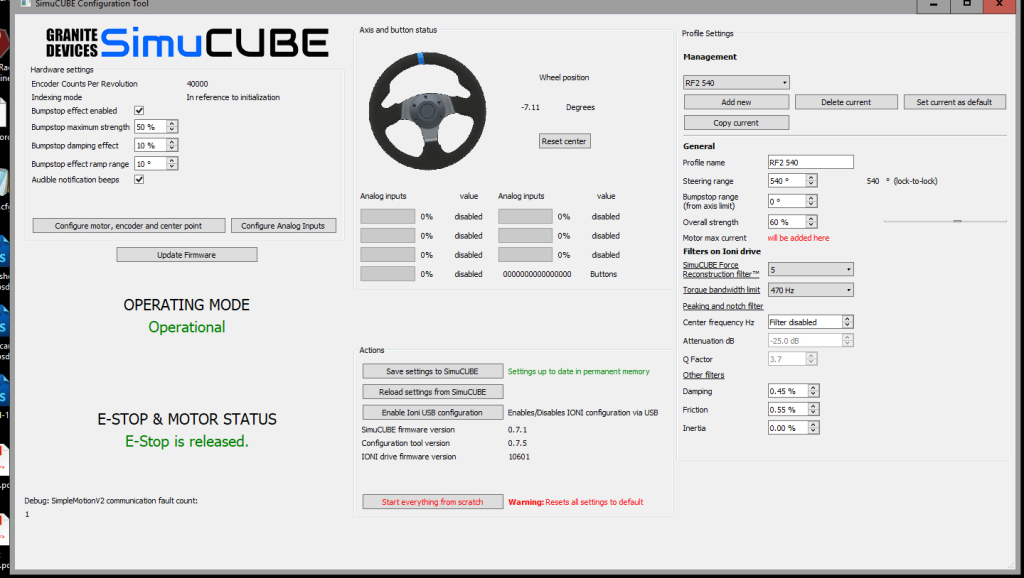
Do you have some settings for the actual simucube firmware and rFactor 2 please?
Does it make sense to use the Reco Filter?
In Richard Burns Rally i have to set center frequenzy HZ filter to 8 and dB to 5.5 to eliminate oscillations.
I think rF2 is more easy to set up, maybe someone can tell me good settings for the flat 6 Porsche GT3. Thank you very much.
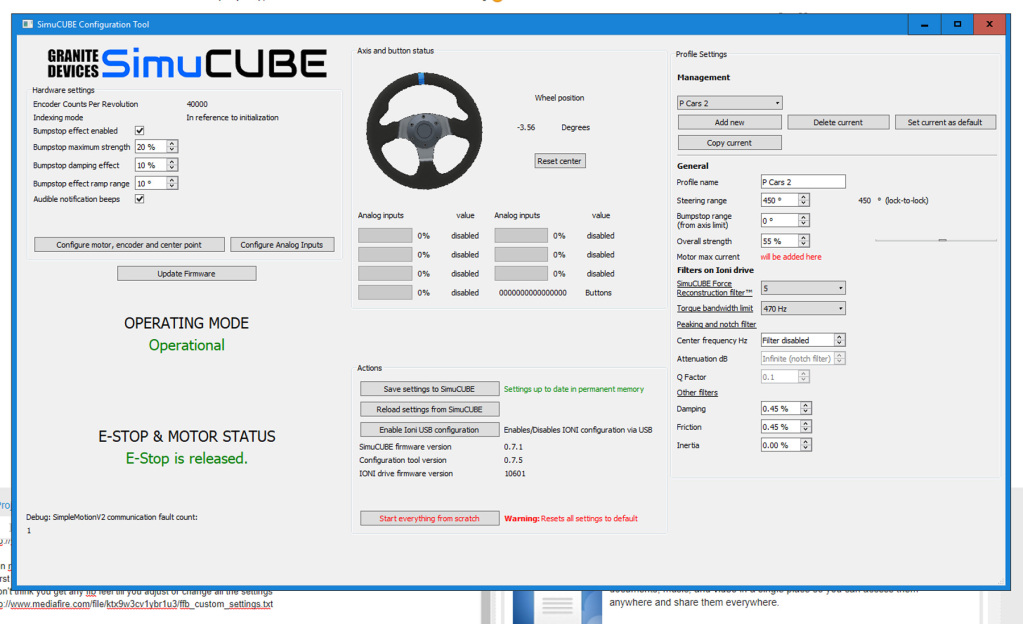
I’m using these settings .50 to .60 Multi’s in game URD EGT and S397 GT3 mod with slightly higher multi’s in GT3 mod
I use recon 4 or 5 feels very good to me so not played with different settings.
No harm in trying see what feels best for you 
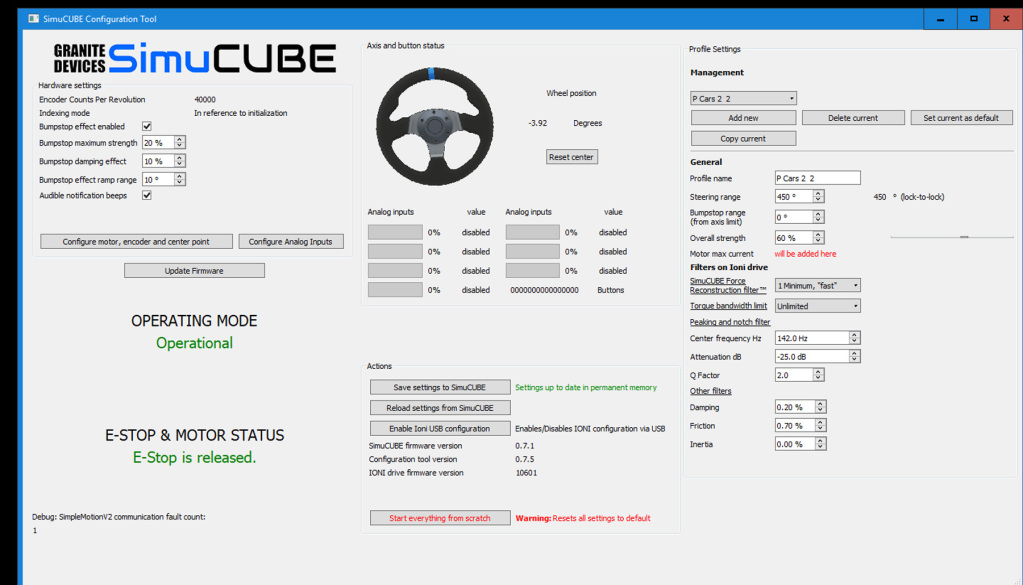
These Settings in SimuCUBE for rF2 feel good in P Cars 2 as well with jacks standard DD file
},
“Force Feedback”:{
“Brake effects on steer axis”:0,
“Brake effects on steer axis#”:“0 = Brake effects on brake axis, 1 = brake effects on steering axis.”,
“Brake effects strength”:-10000,
“Brake effects strength#”:"-10000 to +10000, applies to all brake effects (force, vibration, static spring, etc?)",
“Brake spring coefficient”:0.3,
“Brake spring coefficient#”:“Static spring effect rate (-1.0 to 1.0)”,
“Brake spring saturation”:1,
“Brake spring saturation#”:“Static spring effect peak force (0.0 to 1.0)”,
“Clutch effects on steer axis”:0,
“Clutch effects on steer axis#”:“0 = Clutch effects on clutch axis, 1 = brake effects on steering axis.”,
“Clutch effects strength”:-10000,
“Clutch effects strength#”:"-10000 to +10000, applies to all clutch effects (force, vibration, static spring, etc?)",
“Clutch spring coefficient”:0.2,
“Clutch spring coefficient#”:“Static spring effect rate (-1.0 to 1.0)”,
“Clutch spring saturation”:1,
“Clutch spring saturation#”:“Static spring effect peak force (0.0 to 1.0)”,
“G920_workaround”:false,
“G920_workaround#”:“Workaround for Logitech G920 firmware bugs … may need to turn this off after firmware update if it gets fixed.”,
“Gearbox effects on steer axis”:0,
“Gearbox effects on steer axis#”:“0 = Gearbox effects on gearbox ‘axis’, 1 = brake effects on steering axis.”,
“Gearbox effects strength”:-10000,
“Gearbox effects strength#”:"-10000 to +10000, applies to all gearbox effects (force, vibration, static spring, etc?)",
“Gearbox spring coefficient”:0,
“Gearbox spring coefficient#”:“Static spring effect rate (-1.0 to 1.0)”,
“Gearbox spring saturation”:1,
“Gearbox spring saturation#”:“Static spring effect peak force (0.0 to 1.0)”,
“Ignore controllers”:0,
“Ignore controllers#”:“Do not use FFB on: 1=controller1, 2=controller2, 4=controller3, 8=controller4 (or add values to ignore multiple controllers, for example 15 ignores all)”,
“Jolt magnitude”:0,
“Jolt magnitude#”:“How strong jolts from other cars (or walls) are. Suggested Range: -2.0 to 2.0.”,
“Off-road multiplier”:0.1,
“Off-road multiplier#”:“Temporary test variable to reduce force feedback strength off-road (0.0 = zero FFB, 1.0 = full FFB)”,
“Other spring coefficient”:0,
“Other spring coefficient#”:“Static spring effect rate (-1.0 to 1.0) for any other FFB-capable controllers”,
“Other spring saturation”:0,
“Other spring saturation#”:“Static spring effect peak force (0.0 to 1.0) for any other FFB-capable controllers”,
“Rumble strip magnitude”:0.05,
“Rumble strip magnitude#”:“How strong the canned rumble strip rumble is. Range 0.0 to 1.0, 0.0 disables effect.”,
“Rumble strip pull factor”:0.1,
“Rumble strip pull factor#”:“How strongly wheel pulls right/left when running over a rumble strip. Suggested range: -1.5 to 1.5.”,
“Rumble strip update thresh”:0.02,
“Rumble strip update thresh#”:“Amount of change required to update rumble strip effect (0.0 - 1.0)”,
“Rumble strip wave type”:0,
“Rumble strip wave type#”:“Type of wave to use for vibe: 0=Sine, 1=Square, 2=Triangle, 3=Sawtooth up, 4=Sawtooth down.”,
“Steering effects strength”:-6000,
“Steering effects strength#”:"-10000 to +10000, applies to all steering effects (torque, resistance, static spring, jolt, etc.)",
“Steering resistance coefficient”:0.1,
“Steering resistance coefficient#”:“Coefficient to use for steering resistance. Range: -1.0 to 1.0”,
“Steering resistance saturation”:0,
“Steering resistance saturation#”:“Saturation value to use for steering resistance. Range: 0 - 1.0”,
“Steering resistance type”:0,
“Steering resistance type#”:“0=use damping, 1=use friction”,
“Steering spring coefficient”:0,
“Steering spring coefficient#”:“Static spring effect rate (-1.0 to 1.0)”,
“Steering spring saturation”:0,
“Steering spring saturation#”:“Static spring effect peak force (0.0 to 1.0)”,
“Steering torque capability”:18,
“Steering torque capability#”:“The maximum torque capability of the wheel (in Nm, obviously)”,
“Steering torque extrap blend”:0,
“Steering torque extrap blend#”:“Higher blends of extrapolated value allows driver to feel torque changes even when actual torque exceeds ‘input max’ (0.0=disables, 1.0=max)”,
“Steering torque extrap time”:0.015,
“Steering torque extrap time#”:“Time in seconds to extrapolate steering torque based on current change (Range: 0.001 to 0.050. To disable, set ‘blend’ to 0.0)”,
“Steering torque filter”:0,
“Steering torque filter#”:“Number of old samples to use to filter torque from vehicle’s steering column (0-32, note that higher values increase effective latency)”,
“Steering torque minimum”:0,
“Steering torque minimum#”:“Minimum torque to apply in either direction to overcome steering wheel’s ‘FFB deadzone’ caused by friction”,
“Steering torque per-vehicle mult”:0.7,
“Steering torque per-vehicle mult#”:“Per-vehicle steering column torque multiplier (this is a copy of the .CCH value)”,
“Steering torque sensitivity”:2,
“Steering torque sensitivity#”:“Sensitivity curve applied to representable torques: 0.0=low 1.0=linear 2.0=high”,
“Steering torque zero-speed mult”:0.25,
“Steering torque zero-speed mult#”:“Multiplier at zero speed to reduce unwanted oscillation from strong static aligning torque”,
“Test_workaround”:true,
“Test_workaround#”:“Workaround for apparent driver CTD on release”,
“Throttle effects on steer axis”:0,
“Throttle effects on steer axis#”:“0 = Throttle effects on throttle axis, 1 = throttle effects on steering axis.”,
“Throttle effects strength”:-10000,
“Throttle effects strength#”:"-10000 to +10000, applies to all throttle effects (force, vibration, static spring, etc?)",
“Throttle spring coefficient”:0.1,
“Throttle spring coefficient#”:“Static spring effect rate (-1.0 to 1.0)”,
“Throttle spring saturation”:1,
“Throttle spring saturation#”:“Static spring effect peak force (0.0 to 1.0)”,
“Type”:1,
“Type#”:“Type of force feedback: 0=off 1=wheel 2=joystick 3=rumble/gamepad 4=custom”,
“Use thread”:true,
“Use thread#”:“Use a separate thread to issue FFB commands which may block with some drivers”
},
Thank you for your answer.
I tried all your settings but have to say that i’m not very happy with them.
After this i created a new controller.json and then i only made changes in force to -10000 an 20nm and tried again with your simucube settings. There was not so much difference between the two controller.json settings.
The SimuCube Settings doesn’t work too for my settings.
I tried the Flat 6 Porsche on Red Bull Ring, but the steering wheels very empty, i need definitly more damping and friciton, maybe a bit inerta too. Will try again but at the moment rFactor 2 is not so nice to drive for me with the new firmware, sadly.
Make a new controller profile, then close the game, add the lines Simon put here and save the file, start rfactor2 and choose that profile, ah!! And Everytime i change inputs in rF2 , the steering help change to “Low” when previously It was in “off”.
Press F1 and take a look, maybe is that. Or look at current driving helps at the hud.
Try with recon 1, unlimited TBH , simucube gain 40-60% that depends of your taste , put the same value un Direct input friction.
And ingame , car multiplier at 1, smoothing 0, min force 0.
Regards.
There is a lot of personal.preference in FFB feeling. That goes for all sims i guess. I didn’t like the setting and json from Simon too ( no offence ment Simon and your help still appreciated) So i went back to.my own json which was based on t500 and personalised which i used with mmos also.
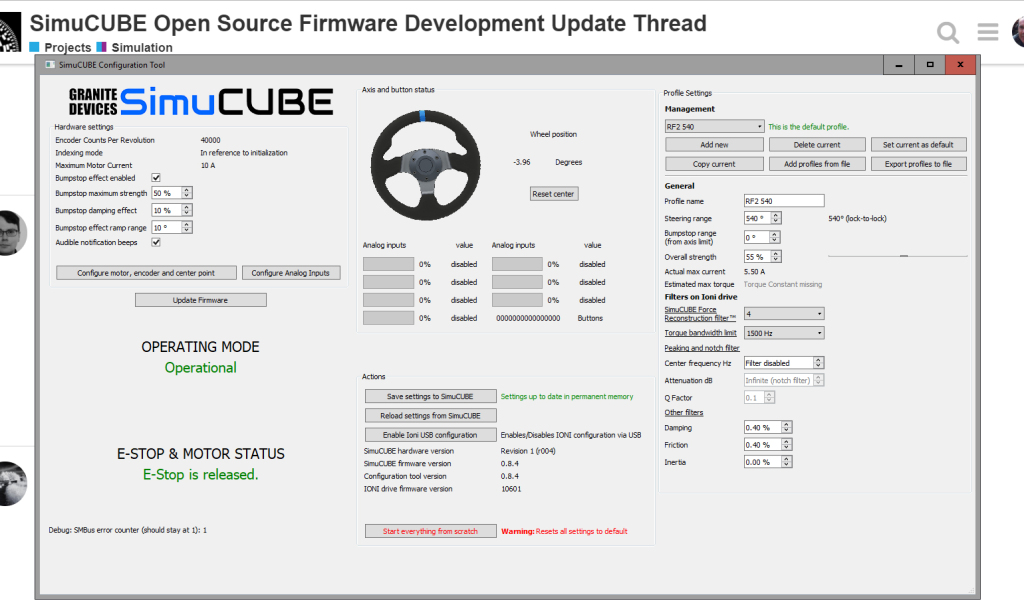
My Simucube setting is 100% gain.
Recon 4 tbw 1000
Damping 0.2
Friction 0.4
In game
FFB multi 0.6 (but most would say way to much force so set to own liking)
No filter.
The FFB multiplier in game is a linear force muliplier (confirmed by M. Offermans) so you get the most fidelity by setting Simucube gain/force at 100% if i understood @Mika correctly the other night. Please chime in Mika if i understood wrong.