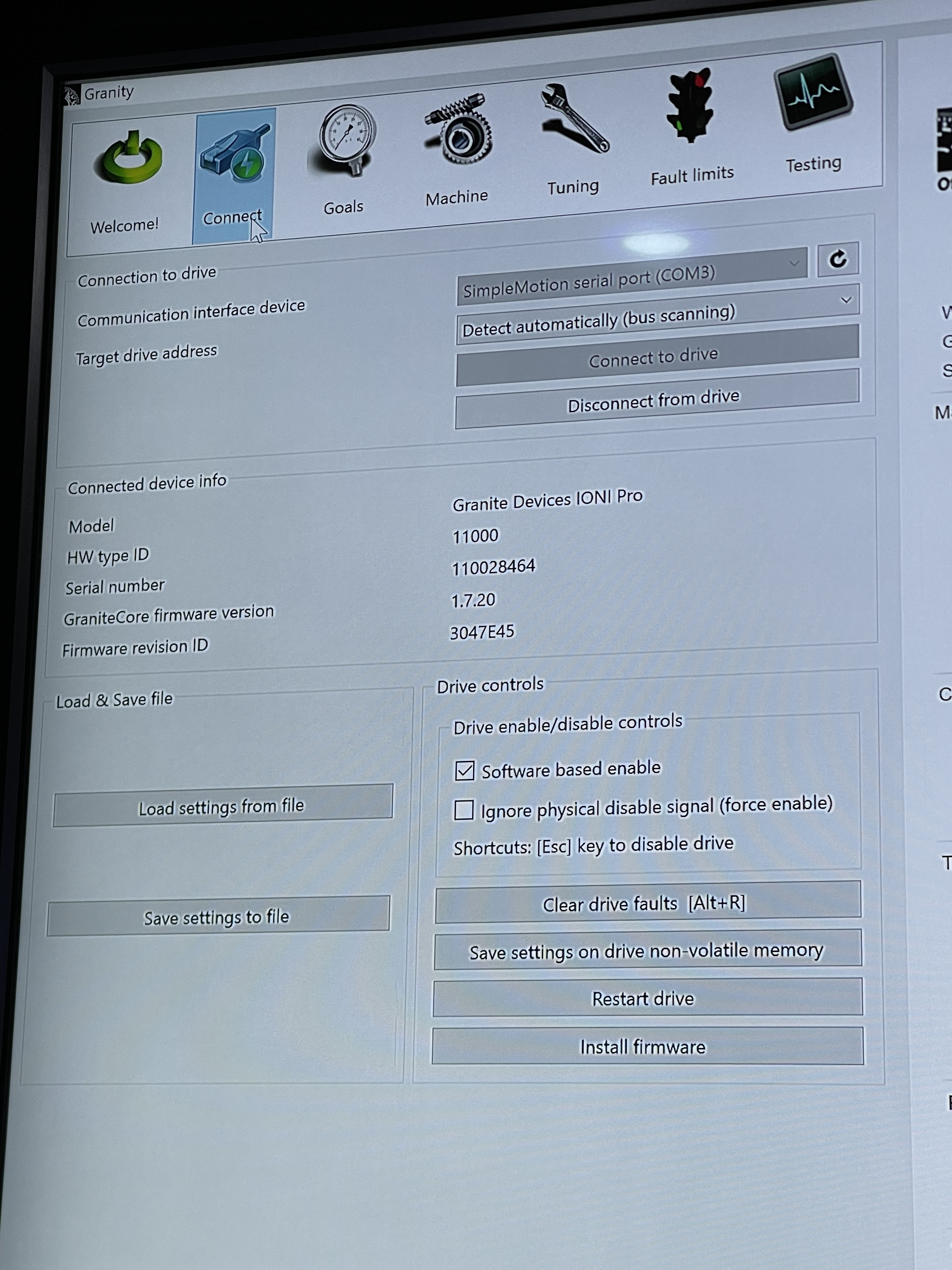
IONI does give the serial encoder read failed error (770xxx) if there is no serial data encoder installed.
If you swap a sincos or quadrature encoder -configured IONI to a system with BiSS encoder, there will be no error, as there is no error checking in the IONI to see if the shaft is turning during phase search routine in sincos or quadrature encoder modes. This is why the swapped IONIs “work but do not register steering input”.
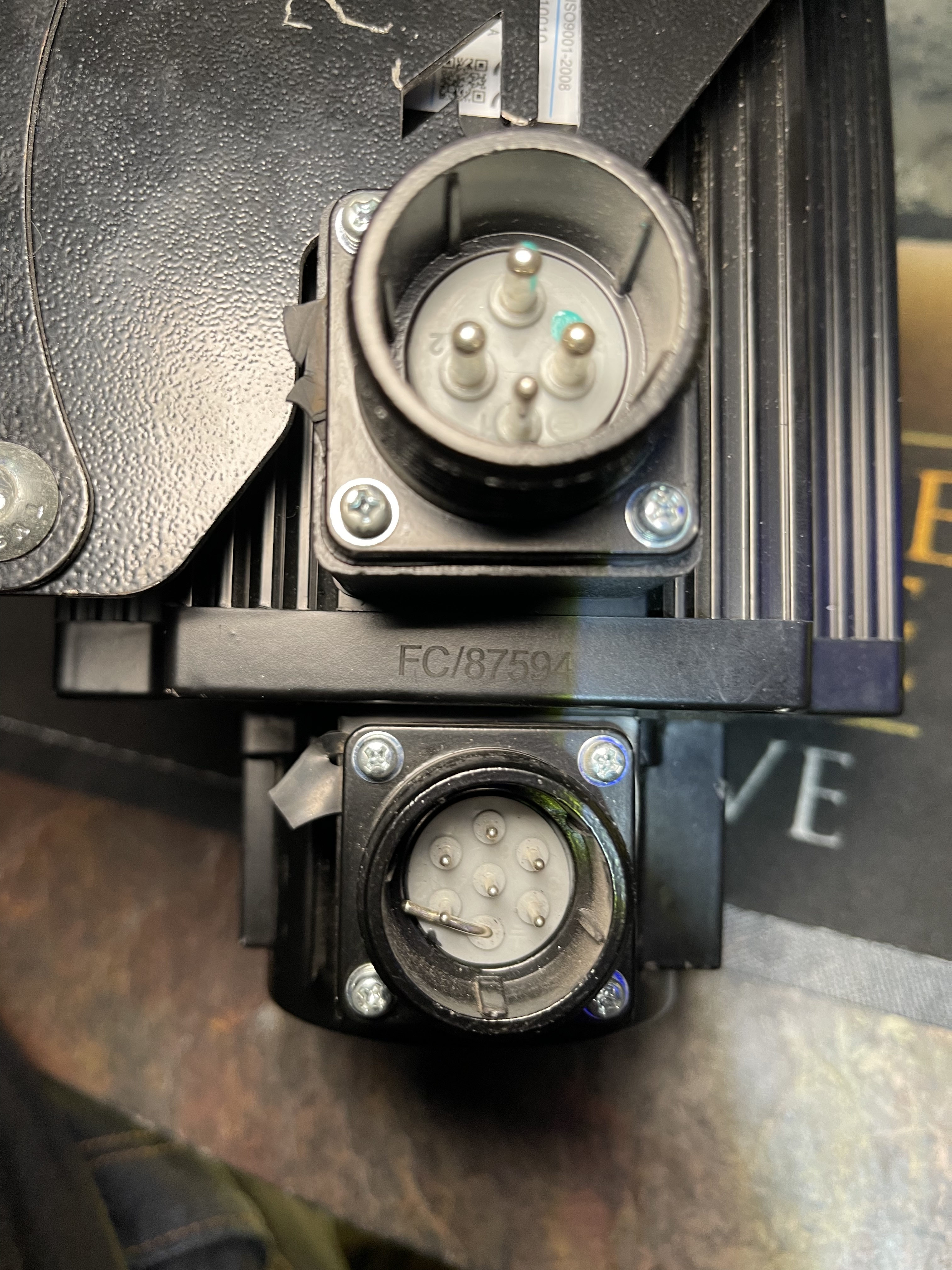
That is a BiSS-C encoder. I believe you could try to source that and a new cable from Lisa Zhan at Mige (that is, from China), but I do not know her current email address that would work.
Thank you, I found the video, will try the larger bolt to push off encoder method.
I wanted to ask, 3/8 or are simulators will always fail connecting to make the buttons work,
The only method is to turn off Simucube power refresh searched devices and turn on the wheel, a few times j till it connects.
As the problem is 100% like this all the time, is there a bug or some thing we can try and do for it to connect without running into this issue every day.
Is it possible that the wheels are connecting to other simucubes in your location? You can enable the audible notification beeps, the motor will beep when a wheel is connected.
Is there a way I can completely delete and all devices it’s ever connected to and connect to the correct Simucube, I think you are correct with it trying to connect on another device.
Do we have a way to name the transmitter as some are names and others are just Bluetooth code ID
No. The pairing information is stored both on the wheel and in the wheel base, and the API we have for this, does not have “forget everything” option.
No. That feature is available in the wireless wheel programming tool and software that we sell to wheel manufacturers. However the wheels definitively shouldn’t be named as some basic bluetooth IDs; the default name for a wheel is “Unnamed BP”.
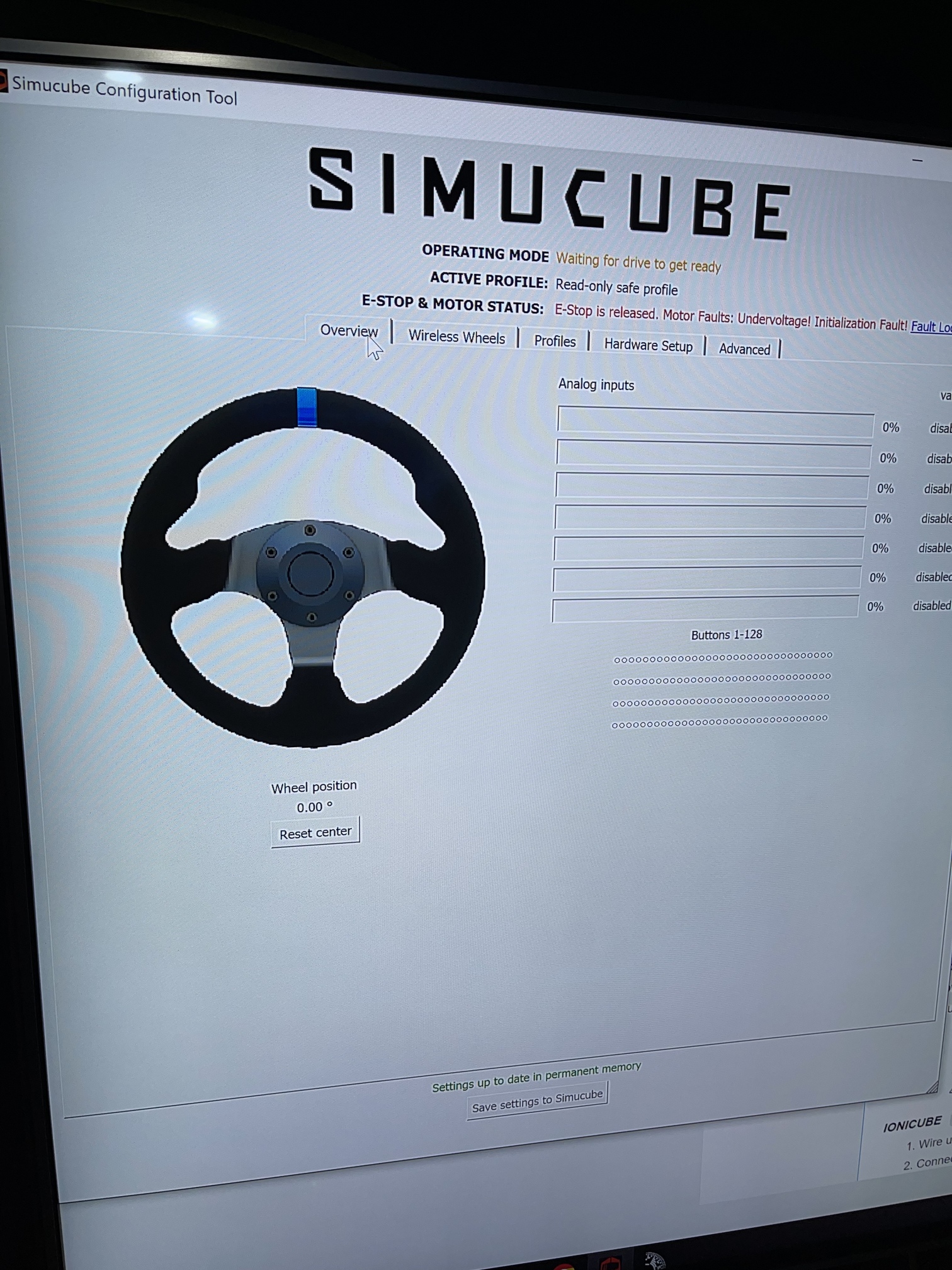
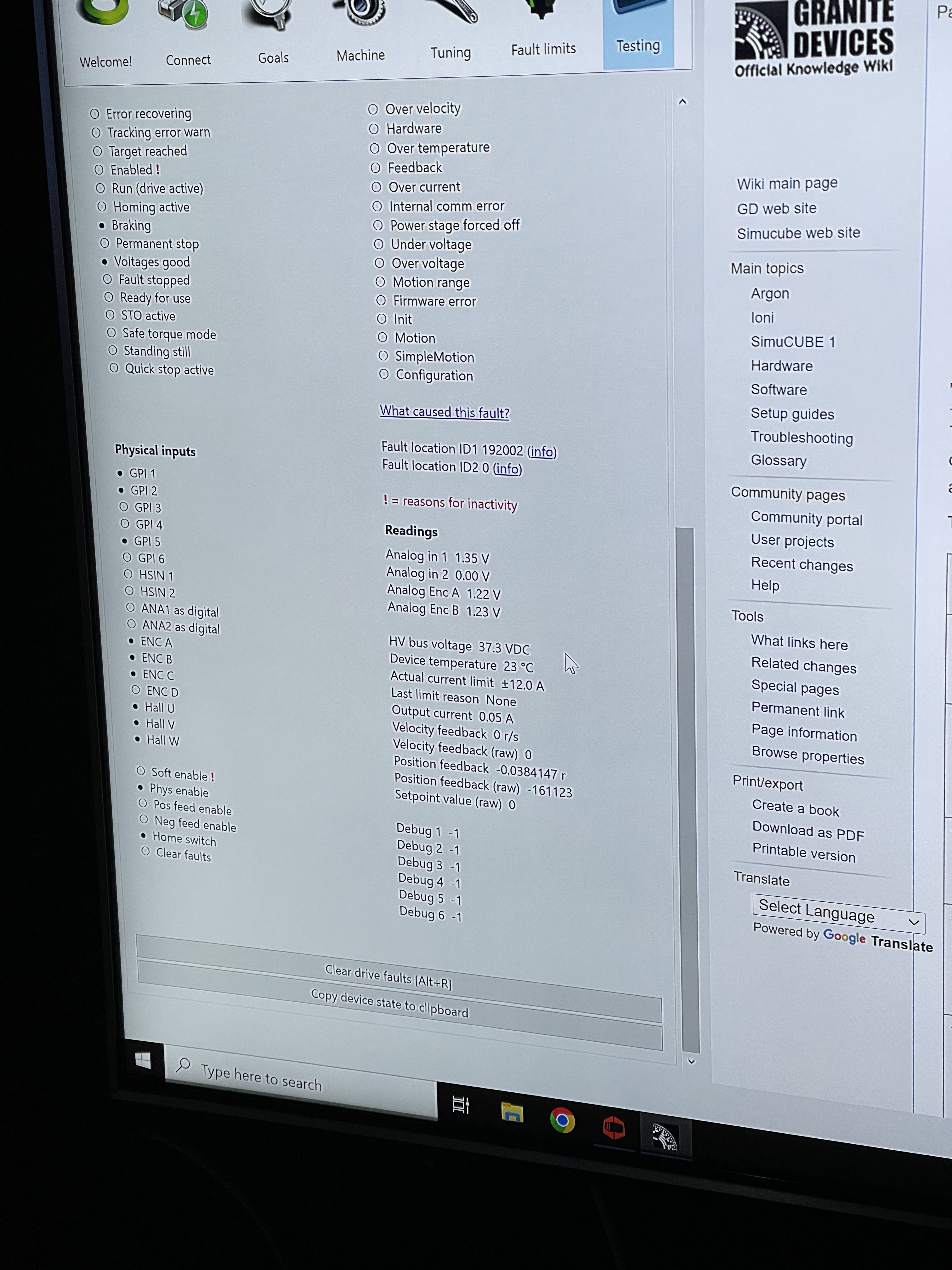
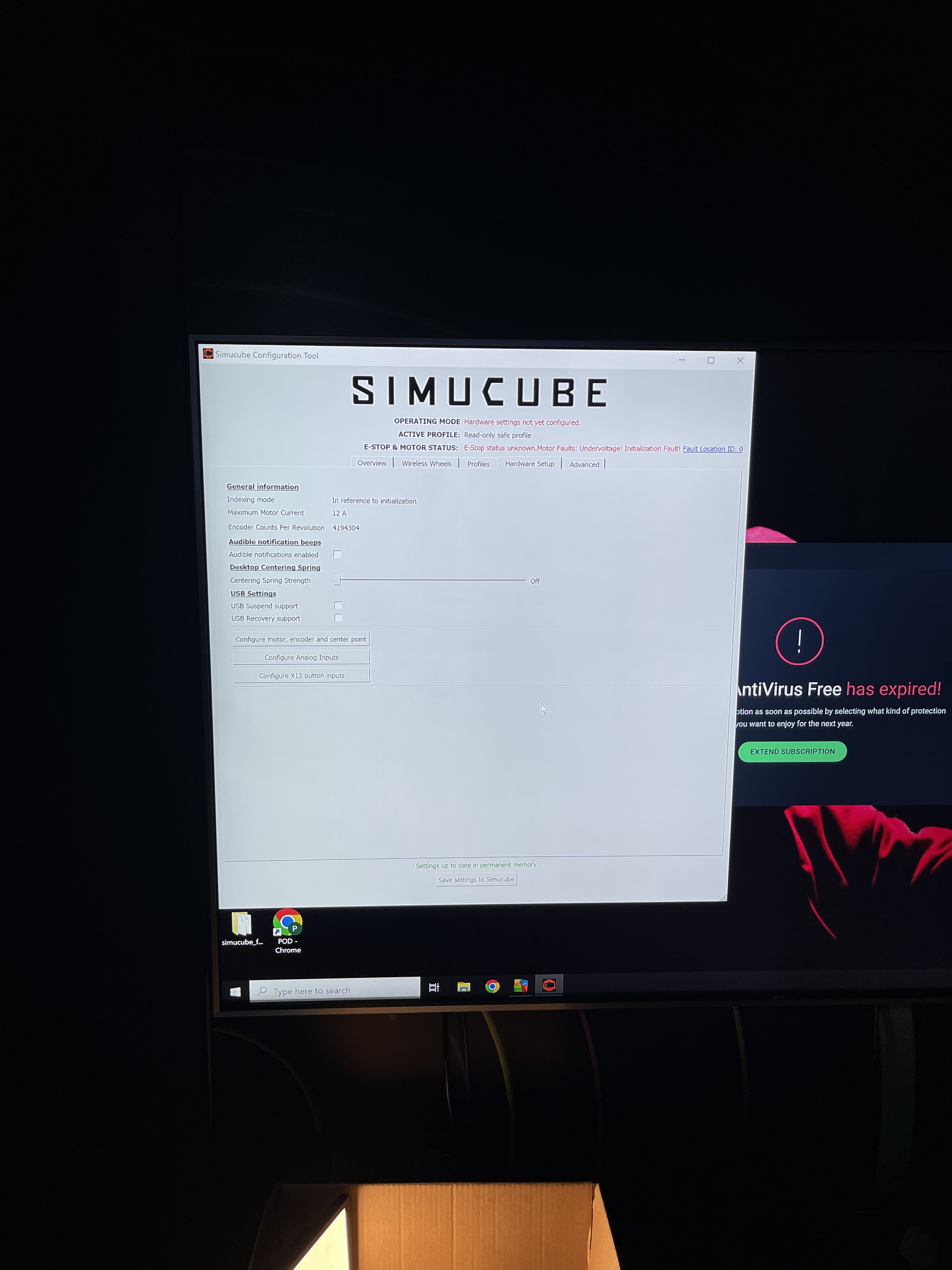
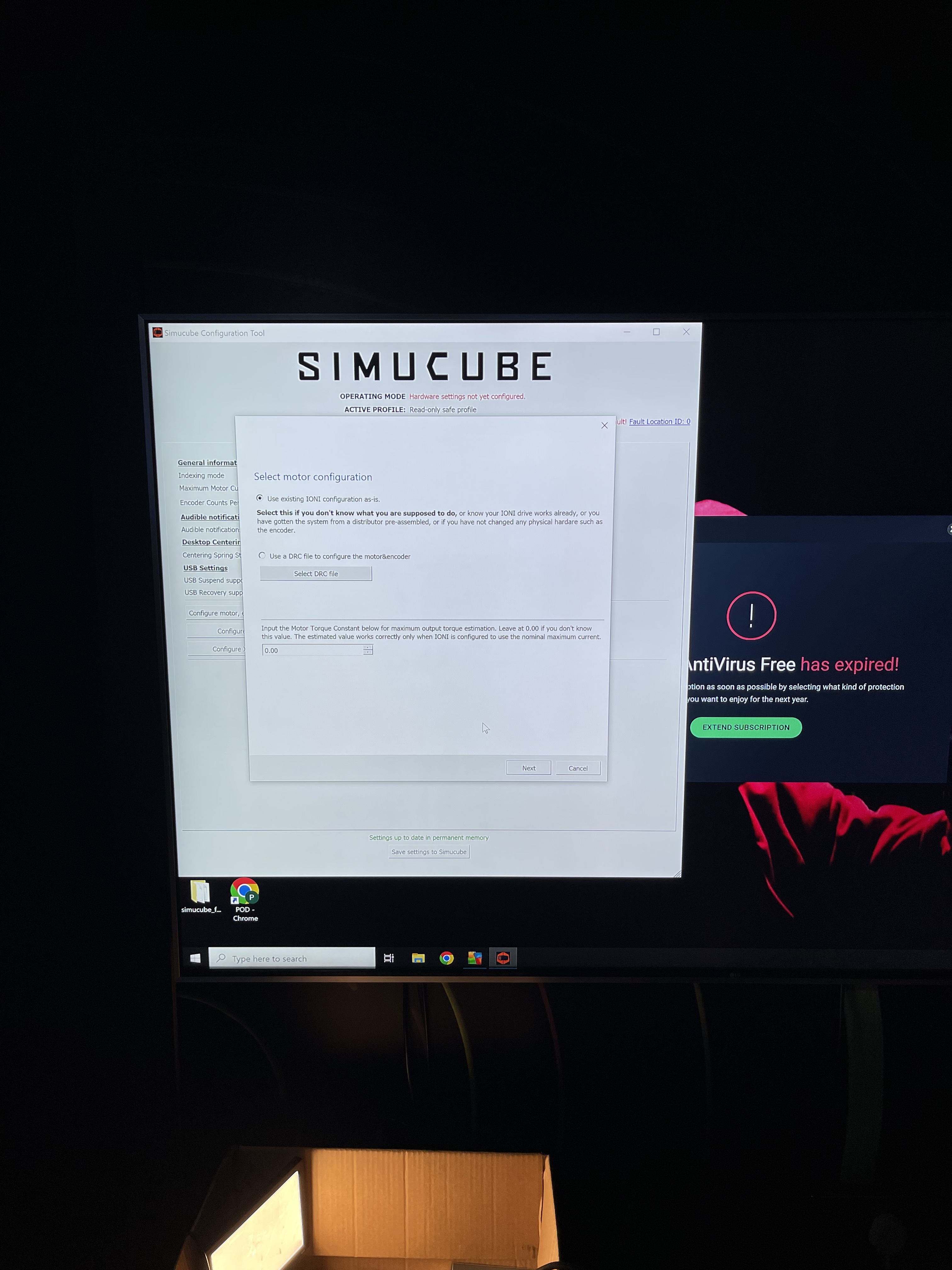
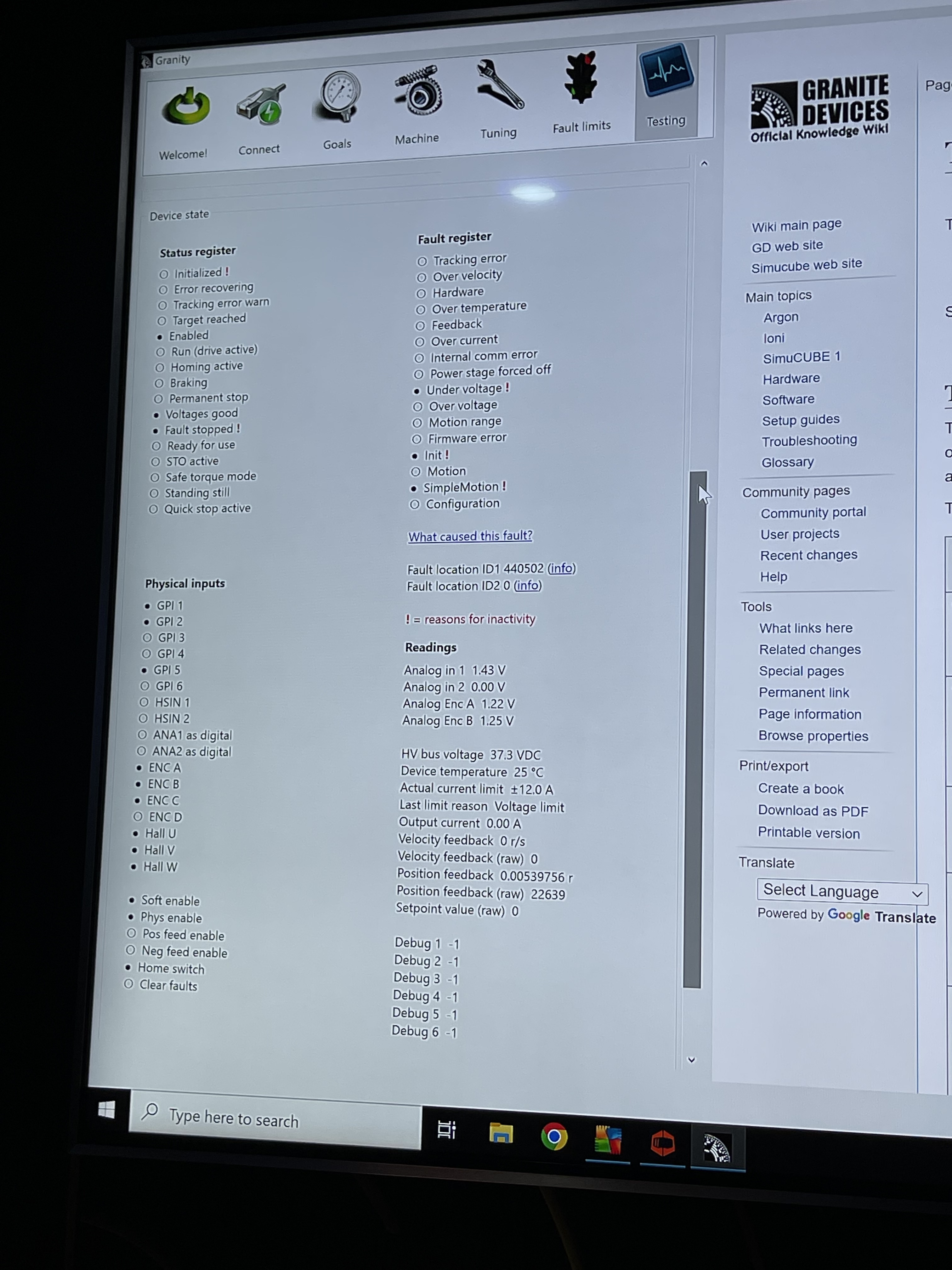
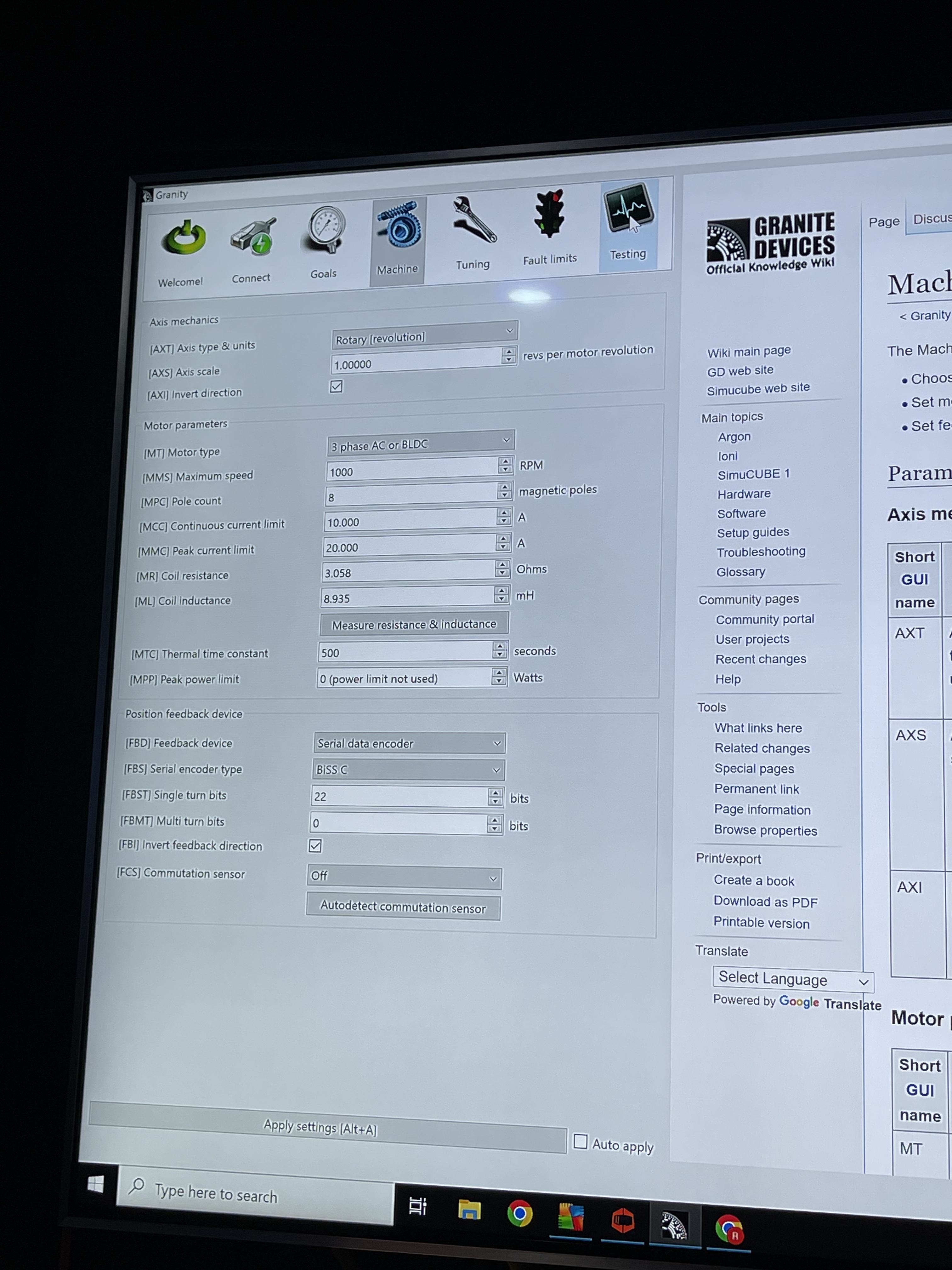
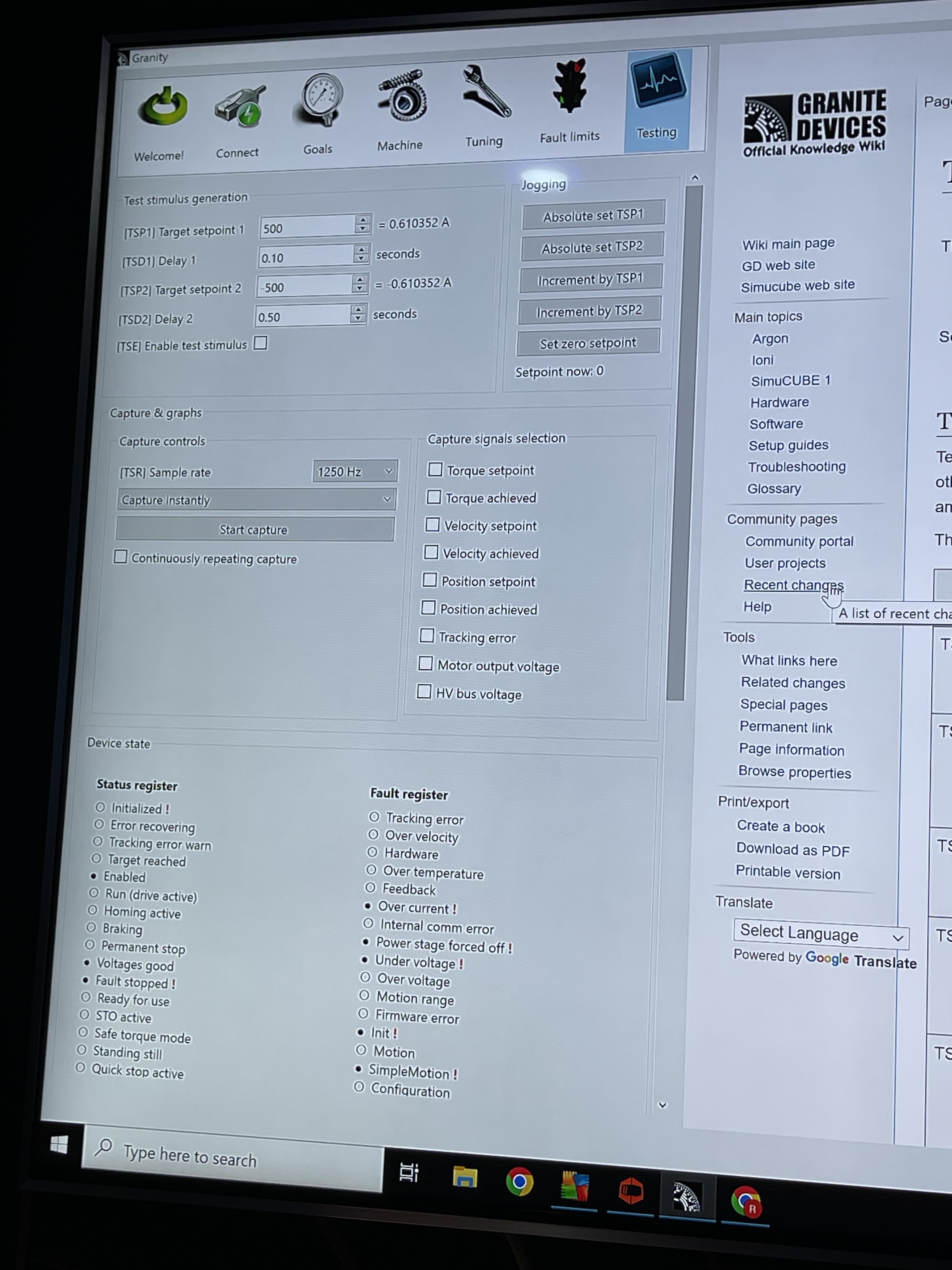
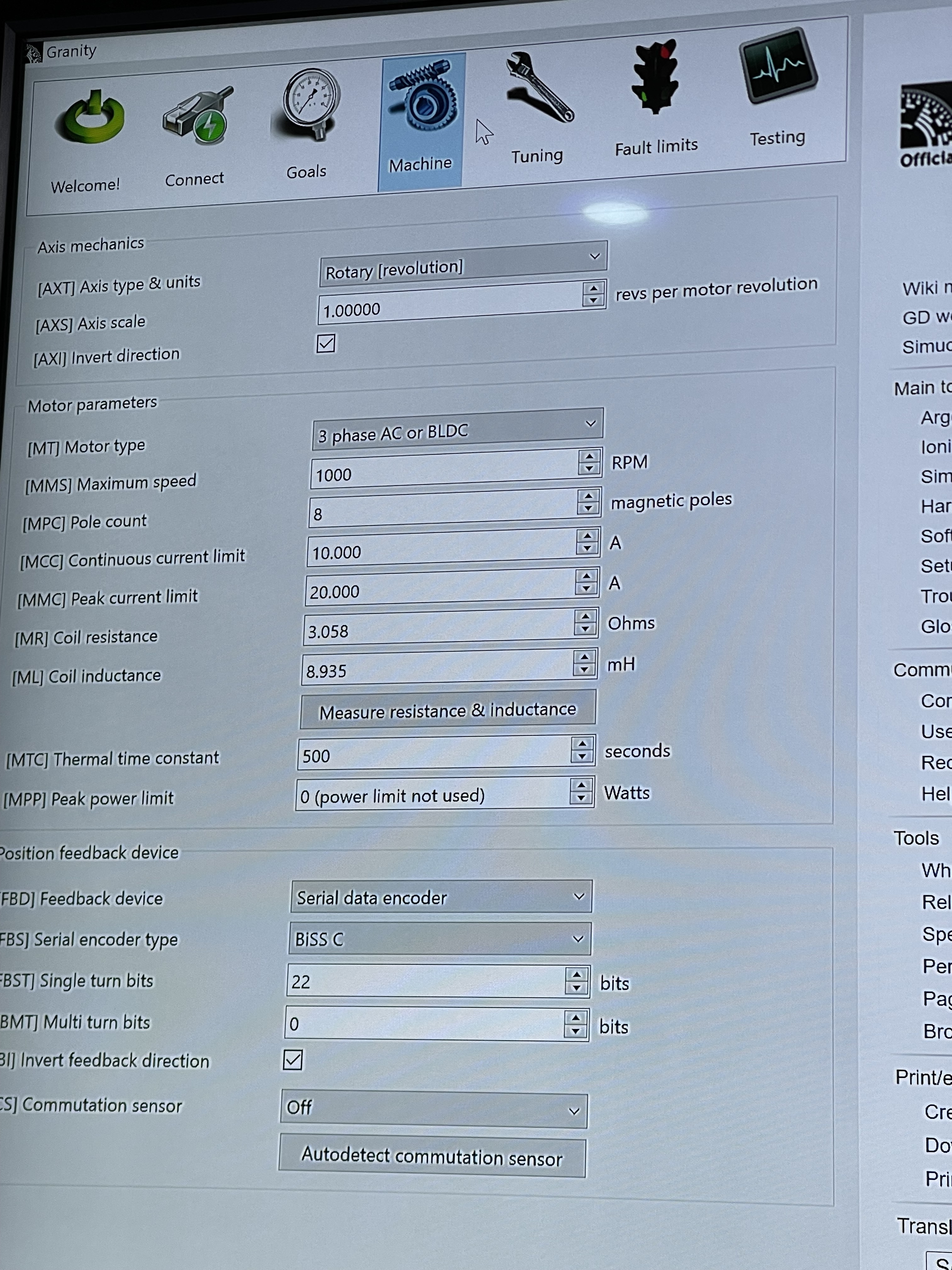
Motor seems to do the phasing routine, but then stops. The servo drive will use a lot of current (maximum specified) when it does the phase search. You have an undervoltage fault visible, so the power supply was not strong enough.
You have 10 A as maximum continuous current and 20 A as maximum peak current. Reduce these and then do the motor configuration wizard again. If you have a small Mige motor, then the correct values should be roughly 8 A and 12 A.