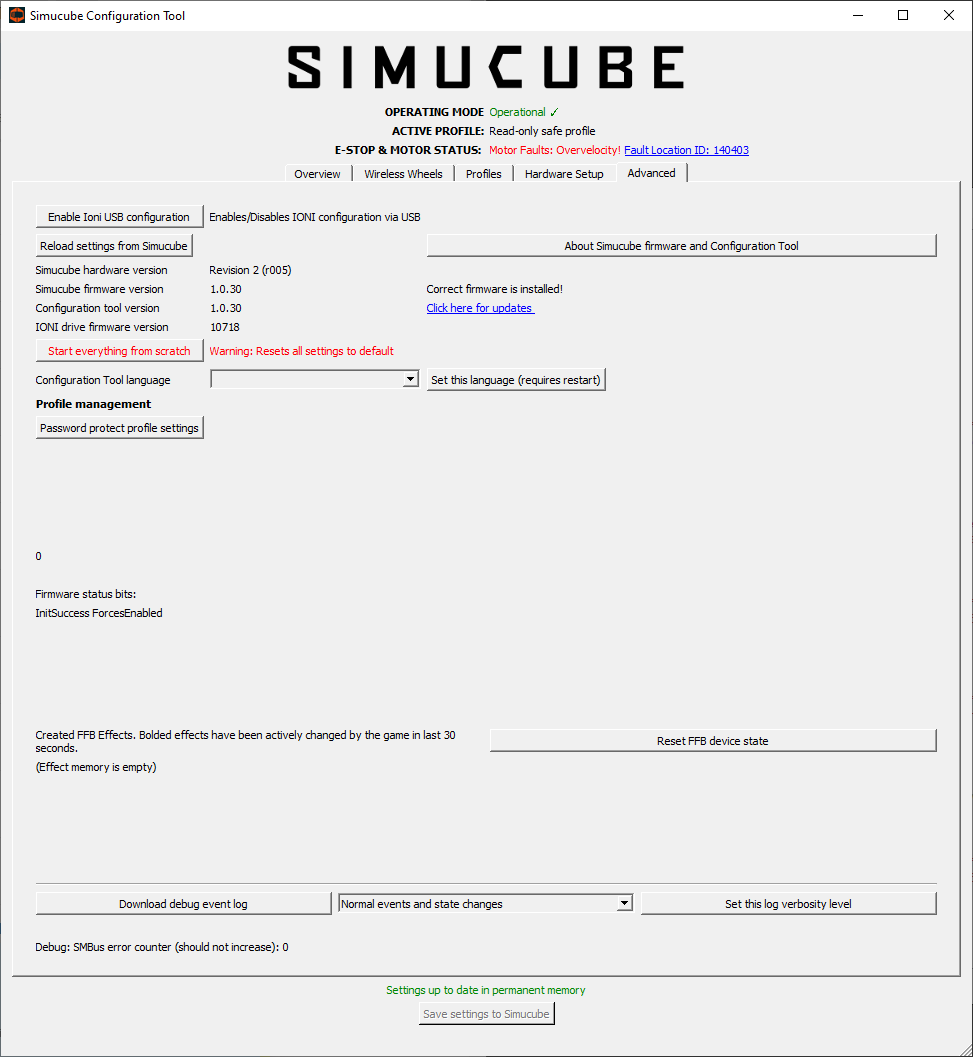
I have just switched from an Argon 10K encoder setup to a Simucube BISS-C. However, when I try and setup my motor I am getting Over Velocity errors. It will phase correctly on startup, but as soon as I move the wheel I get a beeping sound and it reports a motor fault.
Granity and Simucube settings attached. Any suggestions ?

How about taking a look at the fault limits tab
and checking the threshold of the over velocity fault 
The parameter is in encoder counts, and usually limit at 6 rotations per second (as indicated in Granity next to the value) work fine.
Hi Mika,
Thanks for the out of hours response!
I have the FEV set to 11000, which shows as 6.56 revolutions. I’ve increased it to as much as 20000 without success.
Should I be trying something else?
Interesting. I must ask our support engineer to investigate.
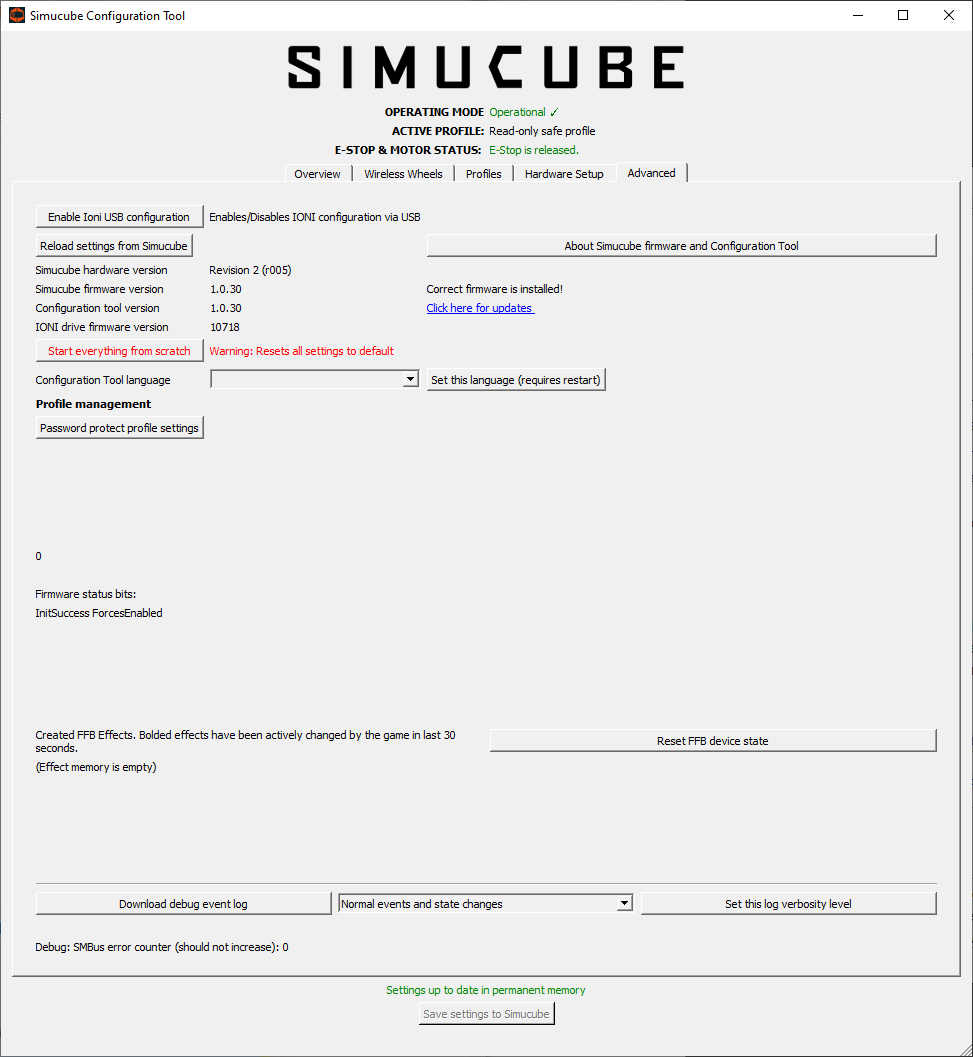
Your bus address offset is 3 so the settings you are using cannot be the ones active on the IONI servo drive. Simucube firmware only knows how to connect to the drive at address 1.
Are you really connected to the servo drive in Granity?
And is it the correct servo drive? Looks like you are connected to a drive.
And, do you also get the fault while turning the wheel while in Granity?
When I connect to the drive in granity it does report as connected on bus address 1.
Yes the fault occurs while turning the wheel in granity.
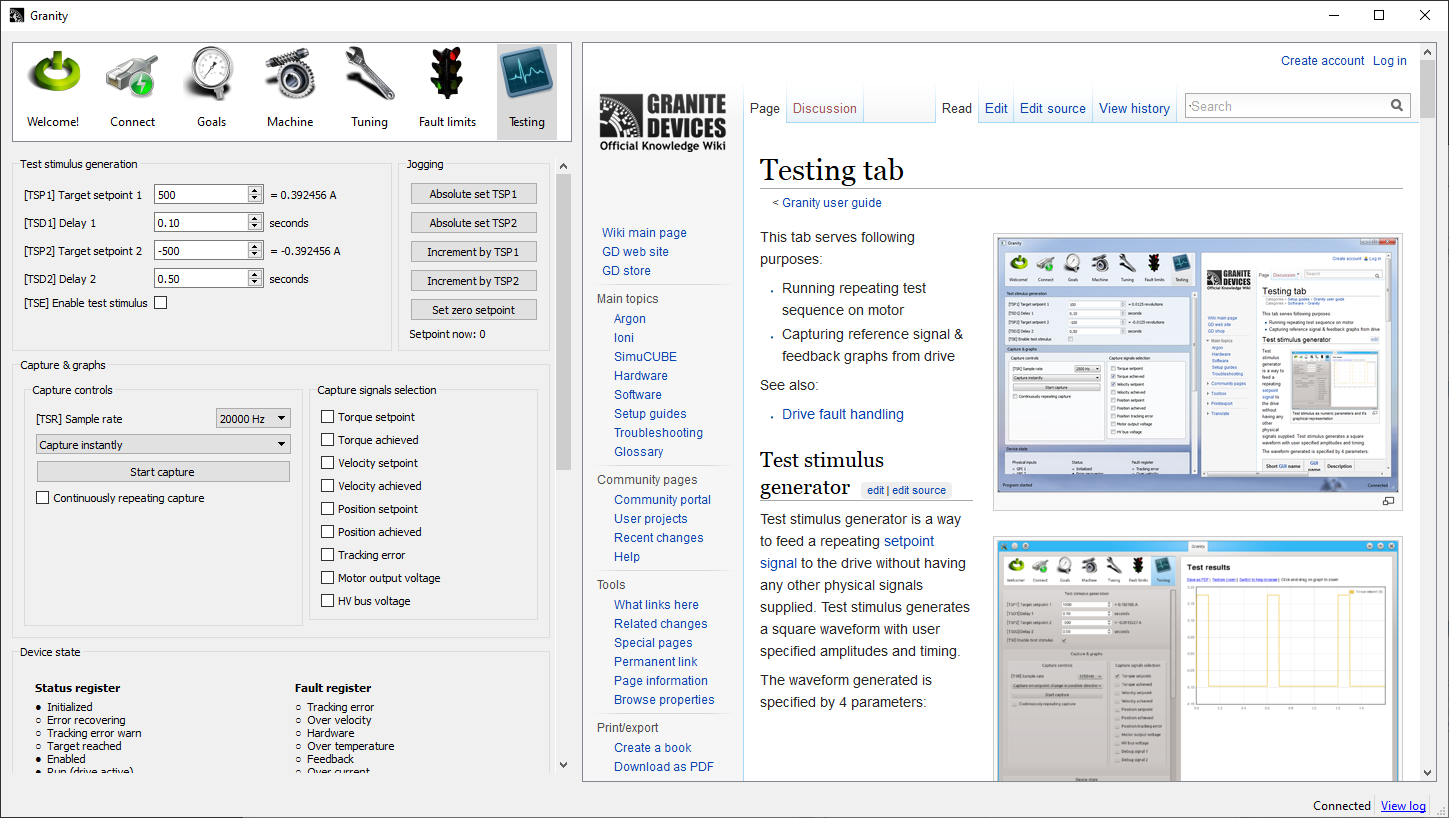
Does the position feedback value on the testing tab correlate to one revolution’s worth of counts if you just turn the wheel slow enough that the fault does not trigger?
The position feedback value is fluctuating even when the wheel is not moving… And when I turn the wheel the values are not consistent. Would this suggest a faulty encoder?
Faulty encoder or some type of wrong wiring.
Thanks! I’ll double check all the wiring in the morning. Also, a LED on the IONI board flashes orange when I start turning the wheel, does this point to anything in particular?
It could be an indicator that the fault is activated.
Checked the wiring and it looks ok. One thing I noticed today was that I can turn the wheel right as much as I want and it is fine…it is only when I start turning left that it gives the over velocity error.
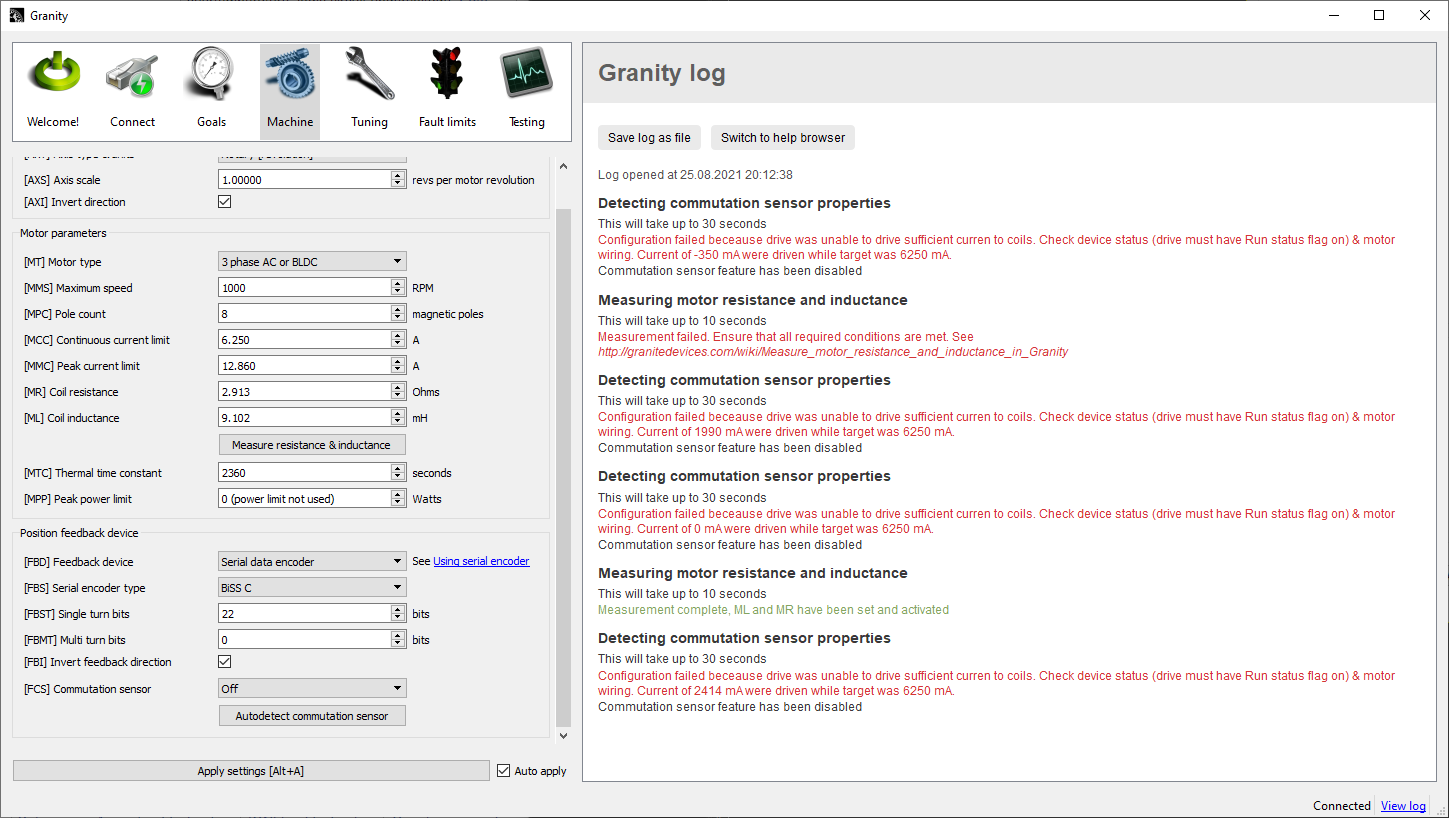
How about if you set the Setpoint input (CRI) parameter to Serial Only? Simucube firmware doesn’t use any PWM/DIR or Step/DIR signaling, so Serial Only will work just fine.
The only thing that changed was the error code…which is now 770101 Serial encoder read failed
Then I would say it is wiring issue or am issue with the encoder itself.
Thanks Mika! Appreciate you troubleshooting as much as you can.
Are you sure you actually have a BiSS-C encoder attached… the reason is that with the BiSS-C there is no phasing routine… This only happens with non Absolute Encoders… If this is the case you could be getting wrong signaling to the system triggering the Issue… Though it is still sort of strange in that in the past when these things happened normally the encoder was lower so it would rotate slower… But could be a difference with BiSS.
I’m not sure that the absolute encoder mode can be enabled and the commutation init source calibration routine to be run if the encoder is not working correctly. Something is going on here that I do not understand.
Can we get the encoder model number from @AndyC1976?