don’t get me wrong . in terms of encoder the drc that you found should work , but it is not ideal in other parameters . i don’t remember who made the original drc to give credits but here you go.
i made you one using that as base, but does not mean that it is ideal in terms of power but you can fine tune it later.
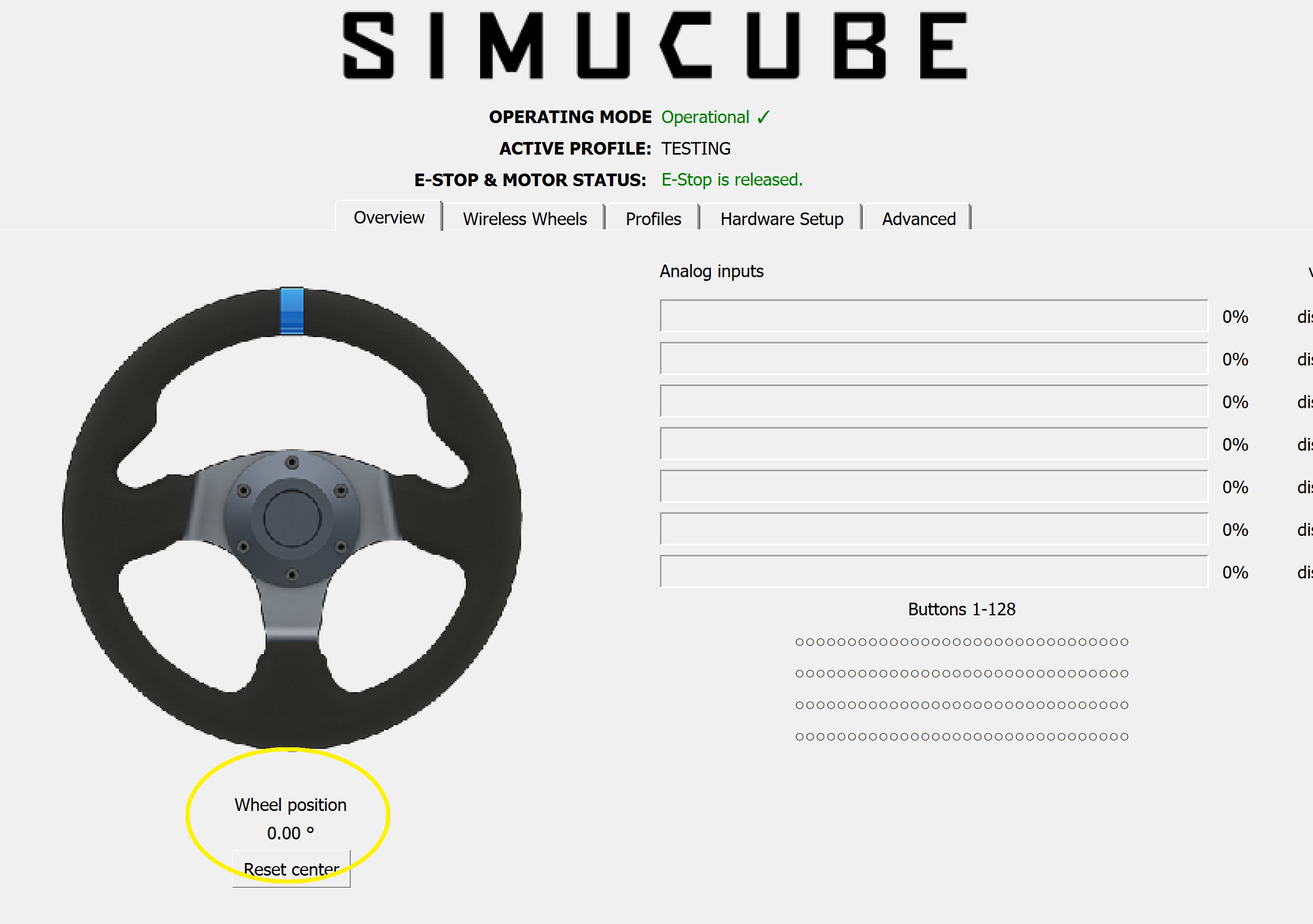
I only tried in iracing, but I knew it wouldn’t work as the the wheel position in Overview tab has never changed.
The motor is turning freely when in this state, however when I “enable ioni” or “configure motor” the motor is initialized and force is required to rotate.
I ll recheck the settings but i believe everything checks out according your hardware, so it could be something hardware related. But as always wait for someone official to review your case.
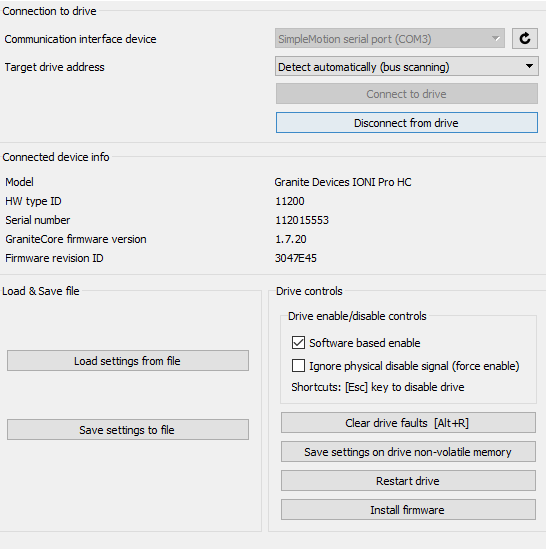
You should monitor the Position Feedback value in Granity on the Testing tab. If that does not increment when you turn the wheel there, then you have wrong wiring, wrong encoder settings or faulty encoder.
Hi Mika, this was the first thing I checked and the values do NOT change at all.
I doubled checked the encoder connections and they’re fine. I cant see any information regarding this particular encoder to confirm correct pin signals. Do they usually run a common wiring colour code?
In the interim I’m trying to source a 22bit Biss-C 10000ppr encoder.
quad encoder 2 is a secondary encoder, not supported in Simucube use. Also the PPR value has not effect, the feedback value would just increment at wrong rate and motor control wouldn’t work (hugely notchy torque).
I want to add, that encoder failures in Simucube 1 were not totally uncommon. I got one of the first Sincos encoders for testing, it worked very well, then I went for a short 5min break, got back and left the pits, car just went straight. Good that we managed to catch the issue, find an easy to implement solution and write instructions before major resellers sent the encoders to end customers…
Thanks Mika. I have ordered a 22bit Biss-C 4.2m cpr encoder and will report back after installing. @Loukas_Bourdas do you have a DRC file for this encoder? Thanks guys.