Hey guys, I have installed the Biss-C encoder. Unfortunately I’m still having the same issue.
Note:
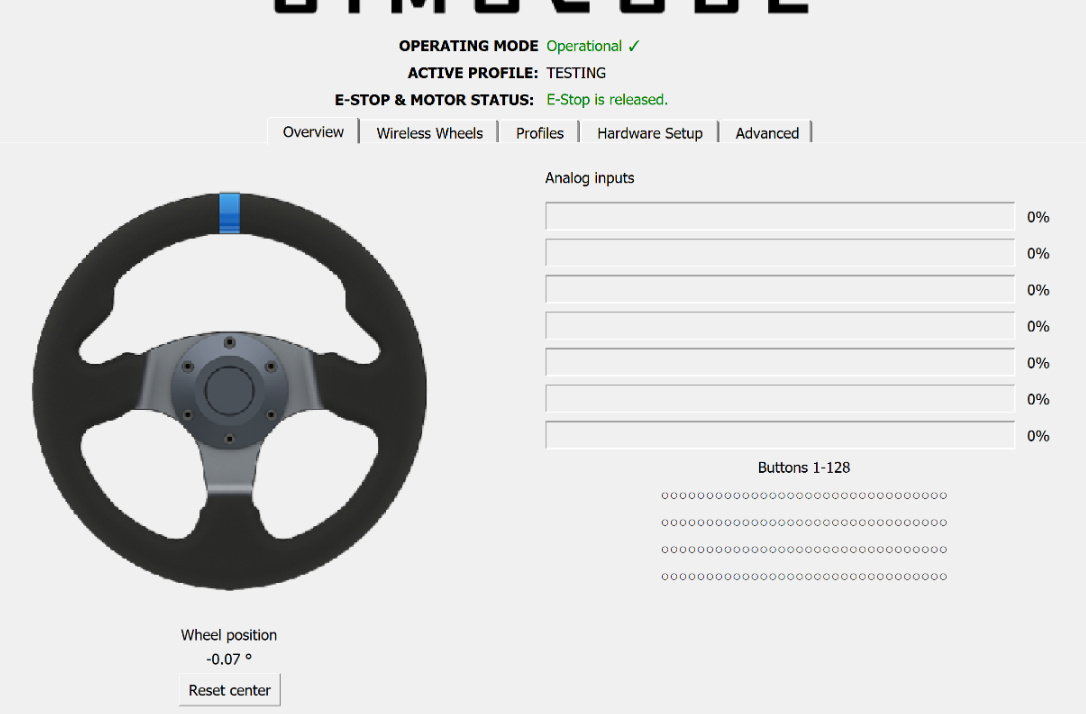
-I have noticed a small change in the wheel movement. (less than a 0.1 of a degree)
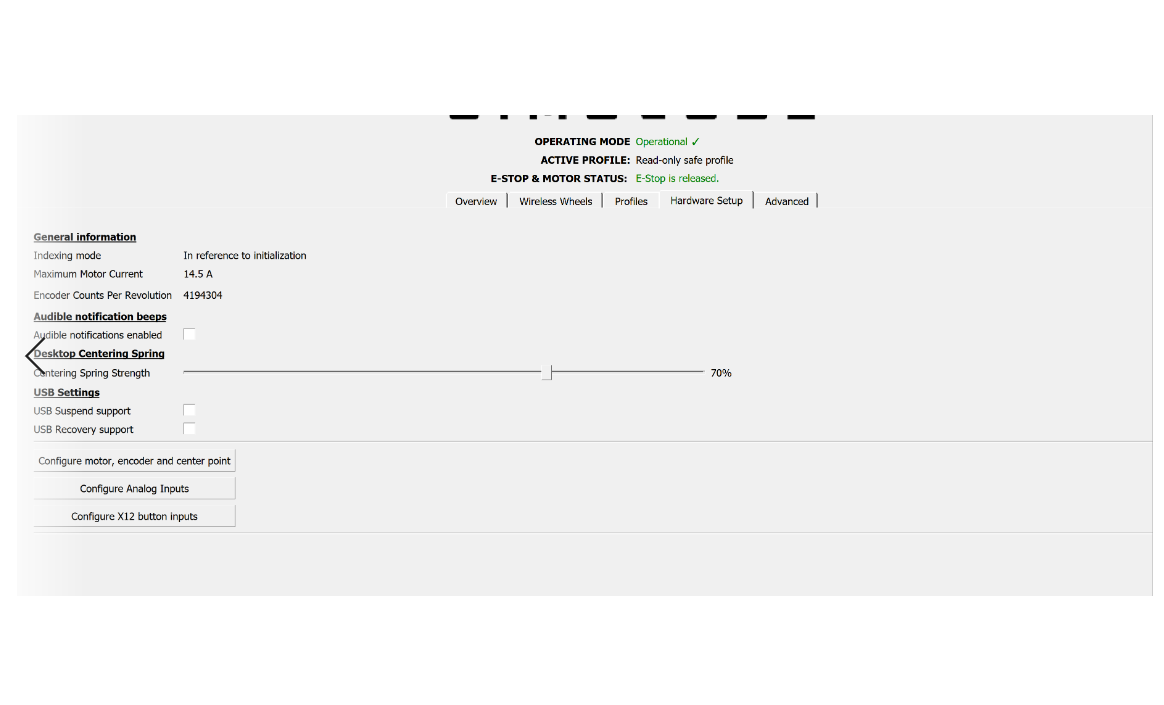
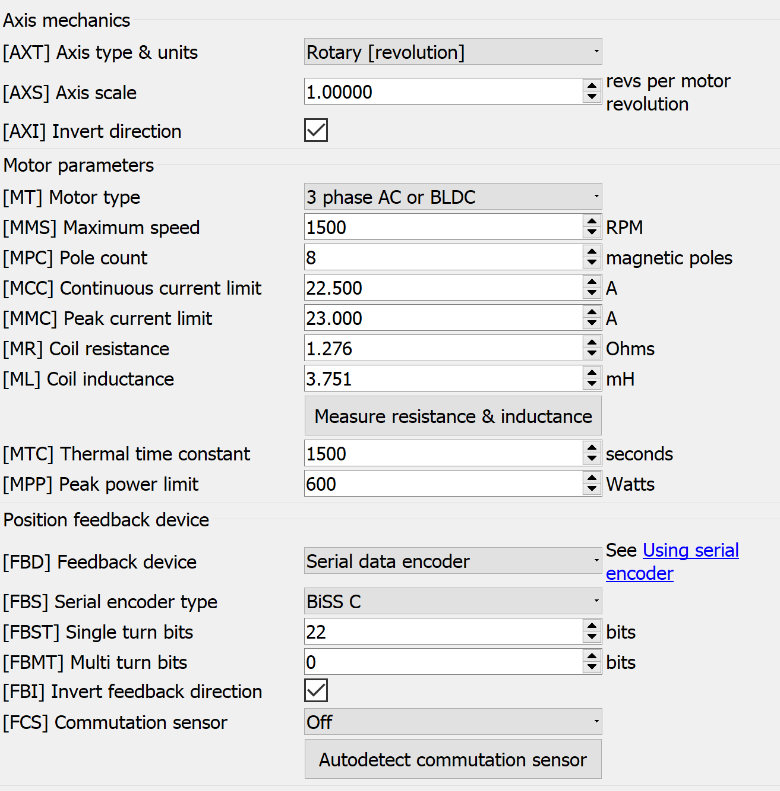
-During hardware setup the wizard picked up the Biss-C encoder for automatic commutation, although it had an error.
-I have checked all wiring and all seems fine.
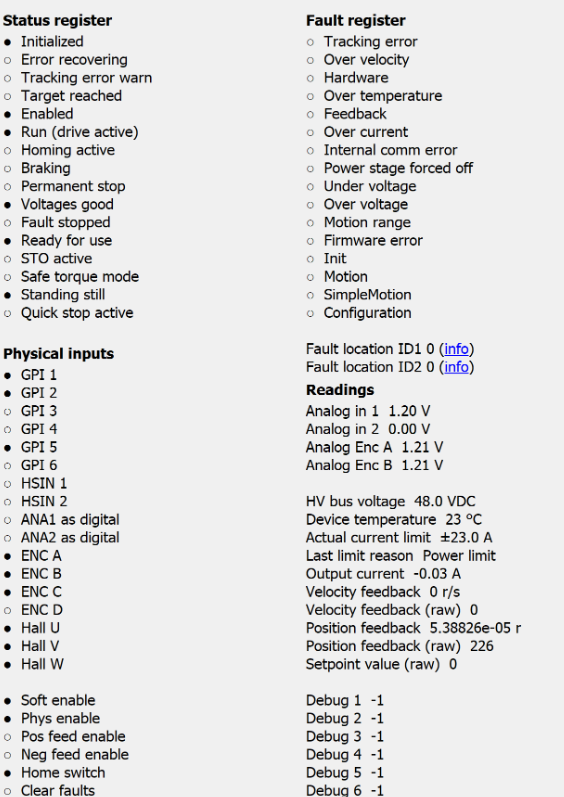
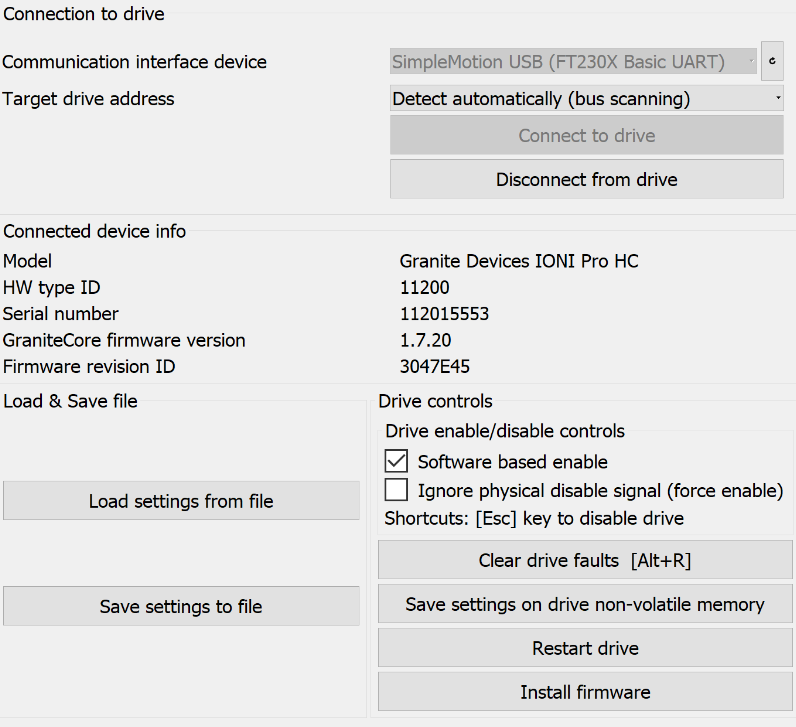
-No error lights on either simucube or ioni drive
-Same as before, but the wheel feels very light (zero force) only during initializing is there any force on the wheel.
Yes, I thought it might have been a scaling issue, but the feedback doesn’t increase the more I turn the wheel, instead it just hovers around +0.17* to - 0.17*)
This is indeed very strange as neither encoders work. Would be the very first actual IONI problem in this regard.
I’d suggest to continue in the support ticket you’ve made to rule out any issues that I can’t think of right now. I’m just starting my summer holiday and next week will not even be at a PC for lengthy while…
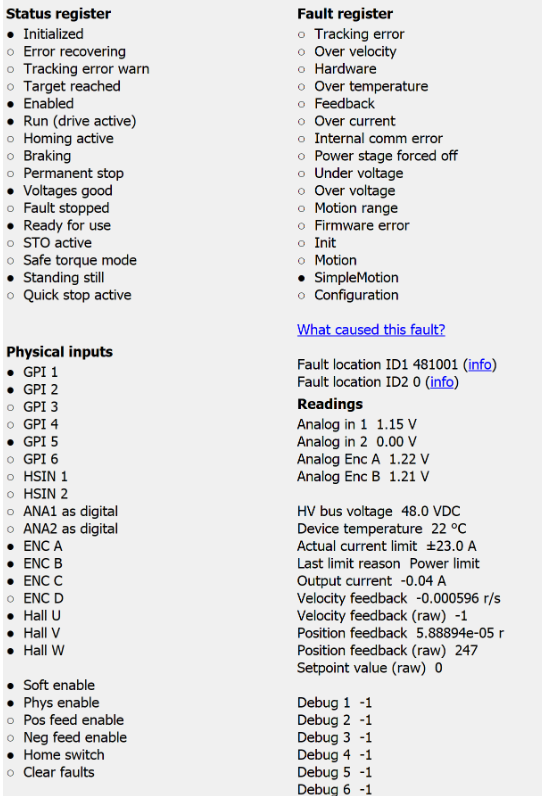
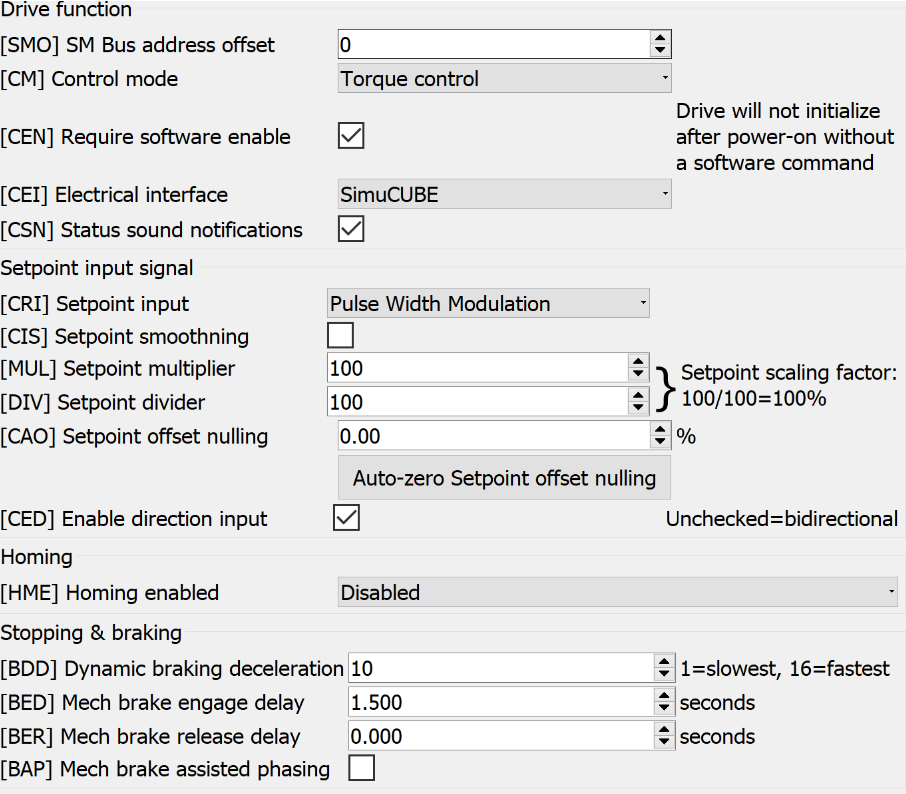
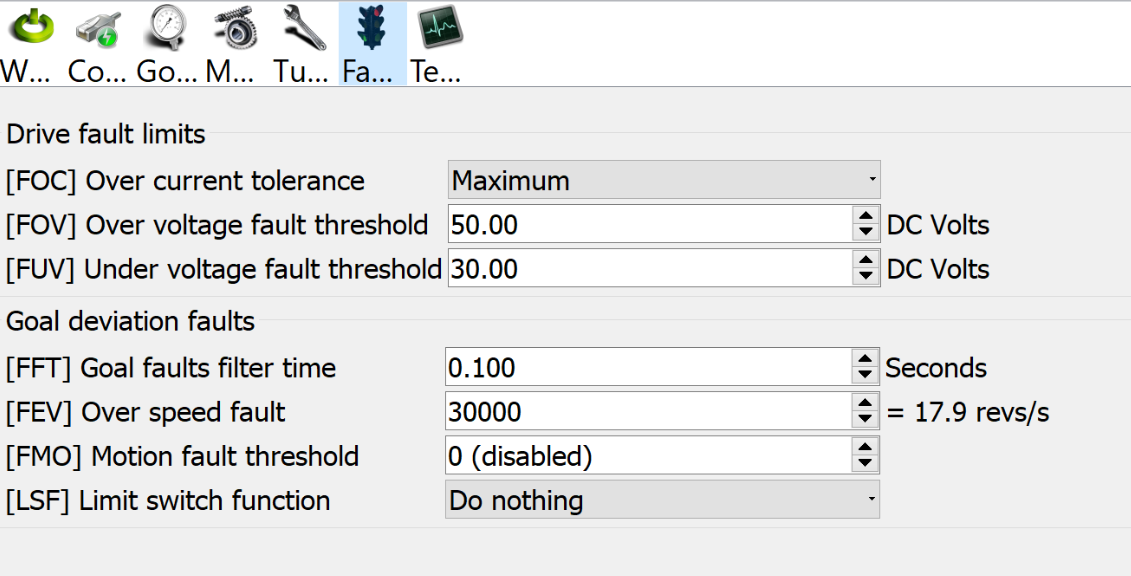
Yes, this is why I have been asking pix of the tabs so we can see what is going on in status, if there are immediate things that jumps out. So is it totally possible that input handling encoder signalling is faulty on the ioni?
Like you say, we might see fault then, but unless there is some wiring issue, this is something that remains, even though it would be first time I have seen it.
ok, great, so we know where the problem is. Sadly, I’m not an expert on the tapered shaft on the motors / encoder interfaces so can’t really help what combinations are correct. What I do remember, is that Mige changed something in the motor rear end at some point.
Yeah, good news on this front. Mige changed the mounting for BiSS C, if my memory serves, there was a small adapter plate some had done for them, but I moved on to other servos by that time.
Tomo used to sell the kits for the BiSS encoders to old Mige servos. But definitely something missing, I am wondering if OP can take some photos of the rear of the servo shaft with encoder off, and the encoder coupling itself.
I used the ORIGINAL M4 socket cap screw to connect the encoder to shaft. Although this was tight it was about 5mm to long and didn’t achieve a connection. Once I changed to the smaller length M4 socket cap (supplied by Joe) this fixed the issue.