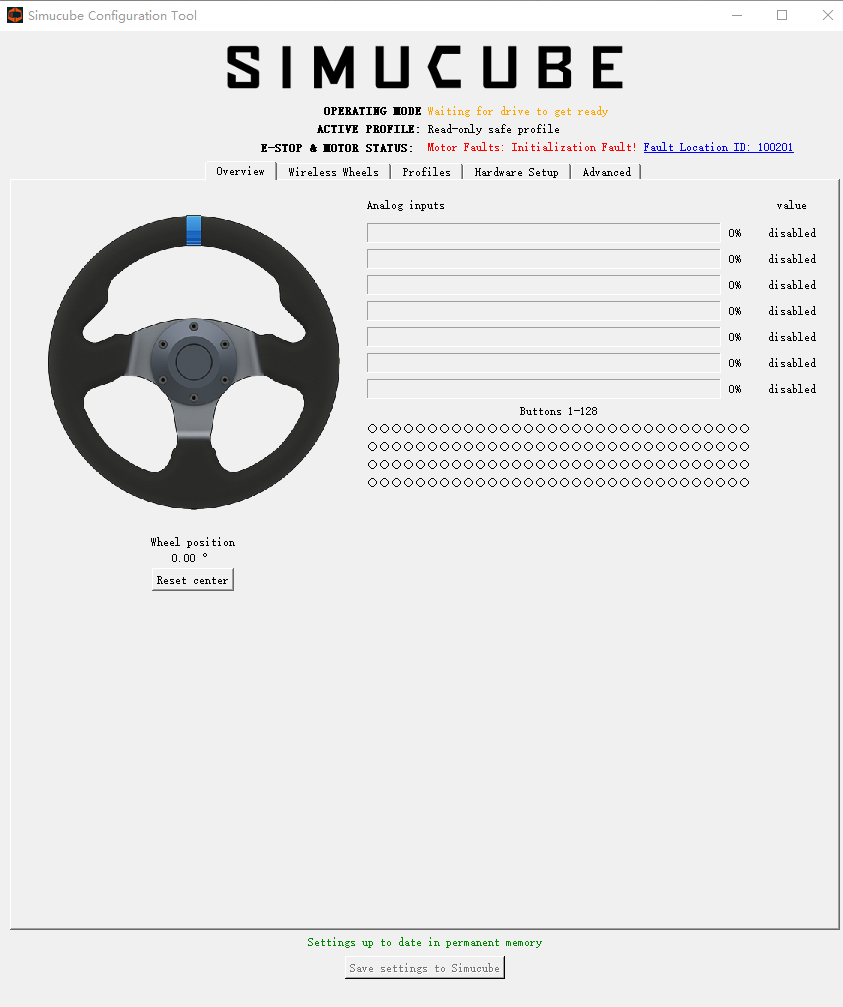
Hello, I have a problem"motor faults: initialzation fault! fault location ID: 100201"
It is my first time to do it.
My hardware configuration:
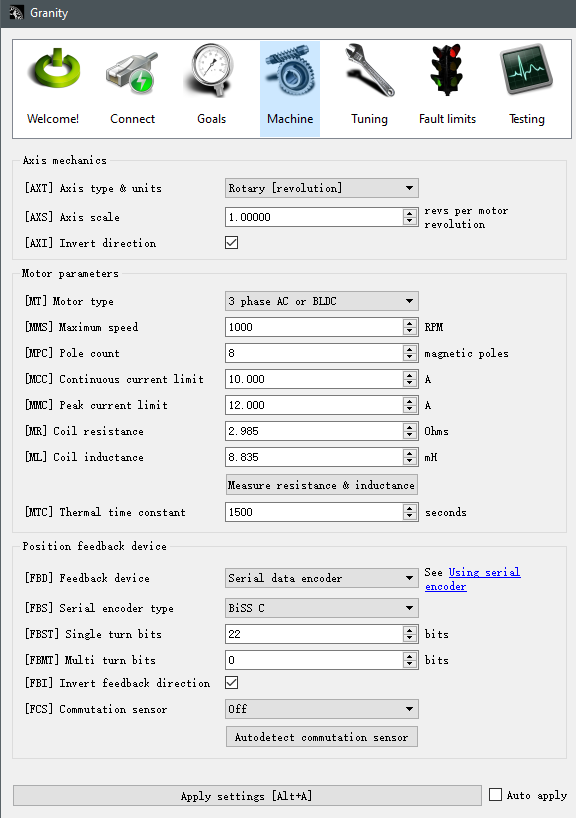
(ioni pro hc, ndr 480, simucube) and a small Mige with Biss-c 2.1 ppr encoder.
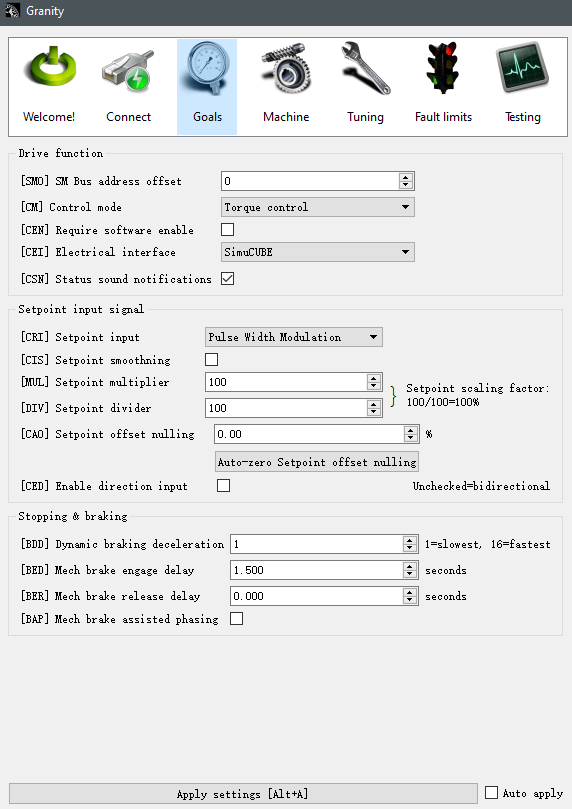
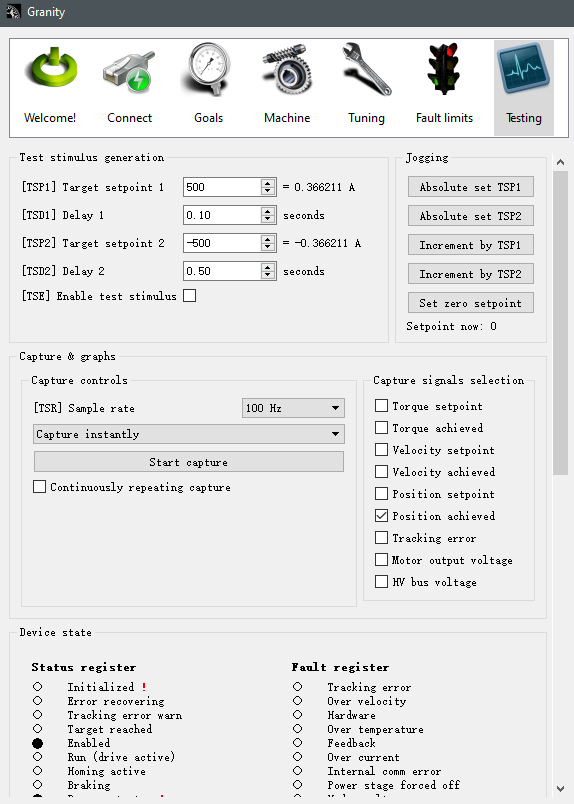
Please post all settings from Granity.
what other should I show?
when I load the setting “10010_MAX_480w-48v_BiSSc(22bit)”
for the granity then I miss the fault.
at frist, I can`t load 0.50.4 successed and then load 0.11.2 and up to 0.50.4.
But it seems that when I up to 0.50.4, simucube show the fault"100201" .
I know the error for why. The setting “10010_MAX_480w-48v_BiSSc(22bit)” is wrong. When I load it in the granity, simucube will cause the fault of 100201.
I don`t know how to solve it. Can you help me ?
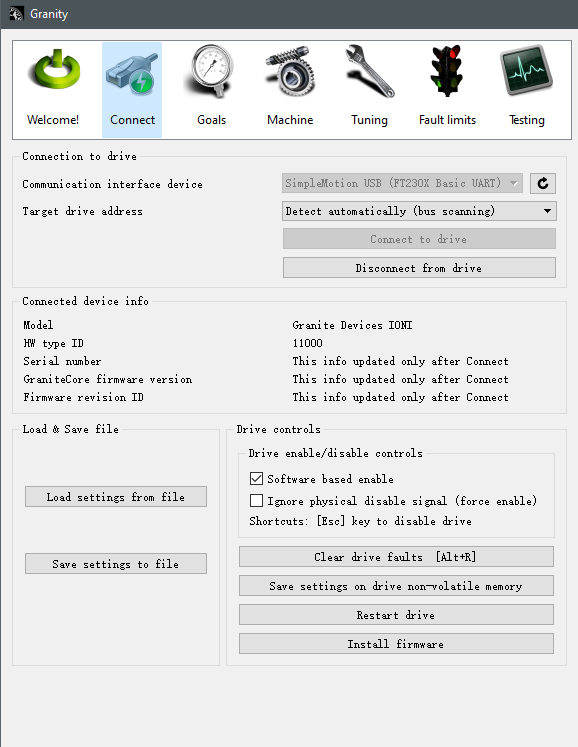
I cannot solve it without knowing your configuration. The 100201 is unsupport encoder fault. Which IONI model do you have?
(ioni pro hc, ndr 480, simucube) and a small Mige with Biss-c 2.1 ppr encoder.
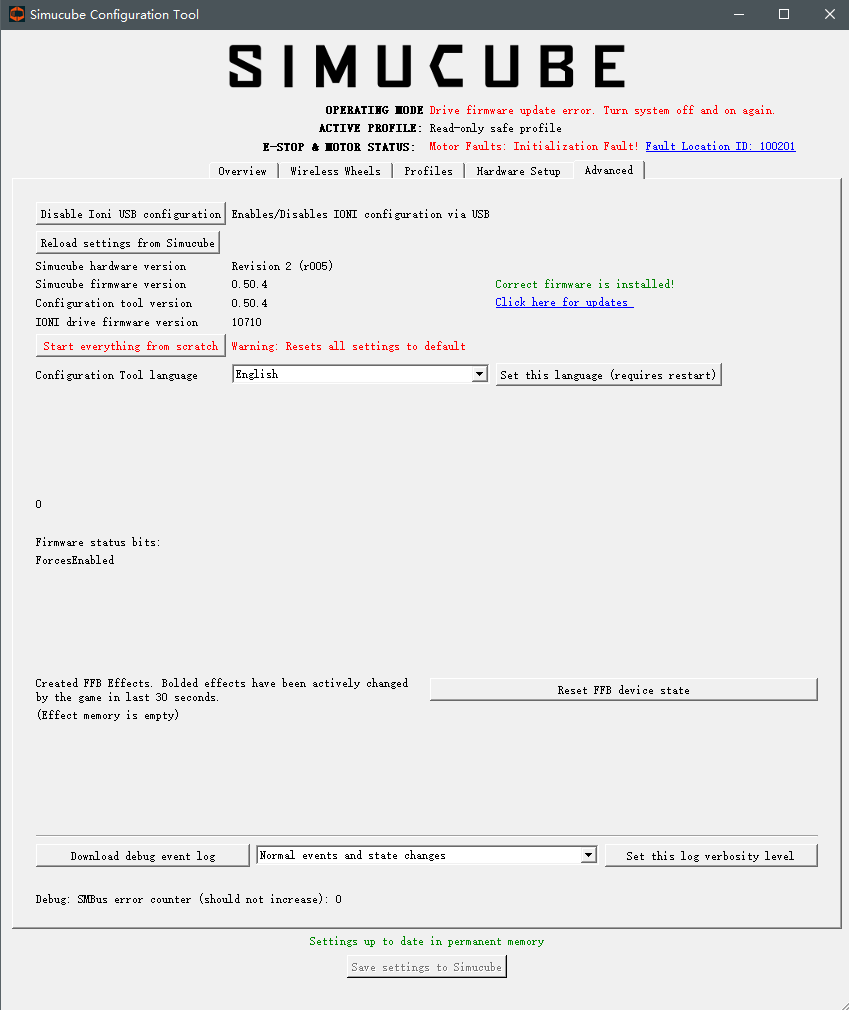
simucube configuration tool verion 0.50.4 and ioni 10710.
I solve the fault “100201”. But I don`t know how to set granity.
after I set granity, simucube show the fault of “100201”.
Does the motor show initialized in Granity too?
I do not know. But I realize I make a mistake on " Servo drive configuration files". I can not set it right.
can you help me?
I will be able to assist after the holidays.
can you give a guide?not the wiki
Hello Hei. Since you have nothing to loose try these drc :
SimuCube BISS-C 21 Bit.drc (9.4 KB)
SimuCube BISS-C 22 Bit.drc (9.4 KB)
thanks,but it looks like not the fault of drc
BK201: If you are saying you made a fault in the configuration, you have nothing to lose to try the files Loukas has linked. Those DRC files are in fact the configuration files for the servo, downloaded into Servo by Granity once you save to the device non-volatile memory…
Cheers,
Beano
[X] Initialized
[ ] Error recovering
[ ] Tracking error warn
[ ] Target reached
[X] Enabled
[ ] Run (drive active)
[ ] Homing active
[X] Braking
[X] Permanent stop !
[X] Voltages good
[ ] Fault stopped
[ ] Ready for use
[ ] STO active
[ ] Safe torque mode
[X] Standing still
[ ] Quick stop active
[ ] Tracking error
[ ] Over velocity
[ ] Hardware
[ ] Over temperature
[ ] Feedback
[ ] Over current
[ ] Internal comm error
[ ] Power stage forced off
[ ] Under voltage
[ ] Over voltage
[ ] Motion range
[ ] Firmware error
[ ] Init
[ ] Motion
[ ] SimpleMotion
[ ] Configuration
Fault location ID1 0 (info)
Fault location ID2 0 (info)
! = reasons for inactivity[X] GPI 1
[X] GPI 2
[X] GPI 3
[ ] GPI 4
[X] GPI 5
[ ] GPI 6
[ ] HSIN 1
[ ] HSIN 2
[ ] ANA1 as digital
[ ] ANA2 as digital
[X] ENC A
[X] ENC B
[X] ENC C
[ ] ENC D
[X] Hall U
[X] Hall V
[X] Hall W
[X] Soft enable
[X] Phys enable
[ ] Pos feed enable
[ ] Neg feed enable
[X] Home switch
[ ] Clear faults
Analog in 1 1.45 V
Analog in 2 0.00 V
Analog Enc A 1.22 V
Analog Enc B 1.25 V
HV bus voltage 48.2 VDC
Device temperature 28 °C
Actual current limit ±12.9 A
Last limit reason None
Output current 0.00 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=-1 | HWTYPE=11000 | HWSERIAL=-1 | BUILDREVISION=3fffffff
| CEI=2 | UID=39b4641a | SMO=0 | COMMUTATIONCFG=0
| HAO=0 | FBR=1.04858e+06 | FBD=5 | FB2D=0
| TBW=11 | KVP=0 | KVI=0 | KPP=0
| VFF=0 | AFF=0 | PFF=0 | CM=2
| MT=3 | AD=0 | FLAGS=131100 | MMC=12.86
| MCC=6.25 | FOC=6 | FOV=49.75 | FUV=25
| FPT=0 | FVT=0 | FEV=10980 | FMO=0
| LSF=0 | LFO=0 | AXS=1 | AXT=3
| FFT=0 | TSR=0 | TCH=0 | TTR=1
| TBT=0 | CRI=3 | DIV=100 | PIF=2500
| MUL=100 | CAL=10 | CSD=10 | CVL=1000
| CRV=0 | MR=2.744 | ML=8.601 | MTC=2360
| MPC=8 | MMS=1000 | CAO=0 | HOMING=0
| HMV=100 | HMA=10 | HMH=0 | HMT=1
| HHL=0 | HLL=0 | HMF=0 | HSA=0
| HSS=0 | overrideAddr1=0 | overrideAddr2=0 | overrideAddr3=0
| overrideVal1=0 | overrideVal2=0 | overrideVal3=0 | BED=1.5
| BER=0 | BDD=1 | CAPS1=1.04832e+06 | CAPS2=3999
This is the report.
When sim tool show flaut 100201, I load the “SimuCUBE_Mige_130ST-M10010_5Amp” drc ,
sim tool will be right.But it can not be controlled by the motor. It is strange.
When I open granity again, the setting will reset.
Do you have both mini-USB cables connected to the Simucube board? If yes, show also a screenshot of the Control Panel /Devices, I would like to see that…we need access to Granity to resolve the issue for you, so let us first get the communications going properly…

Unsupported feedback device selected as position feedback device Feedback device[FBD]
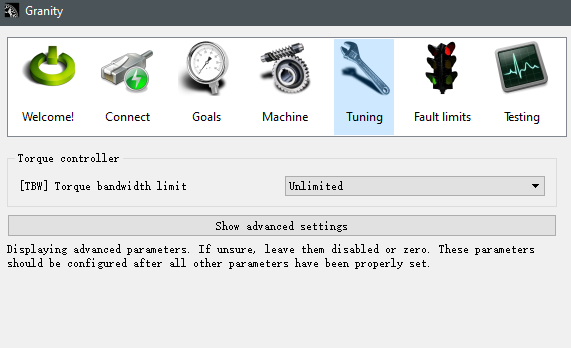
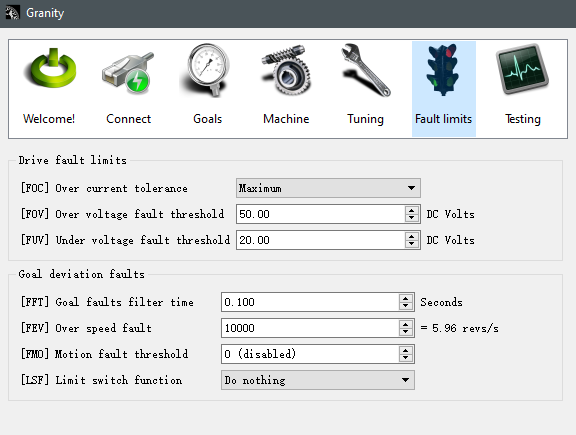
Please show all settings from Granity.
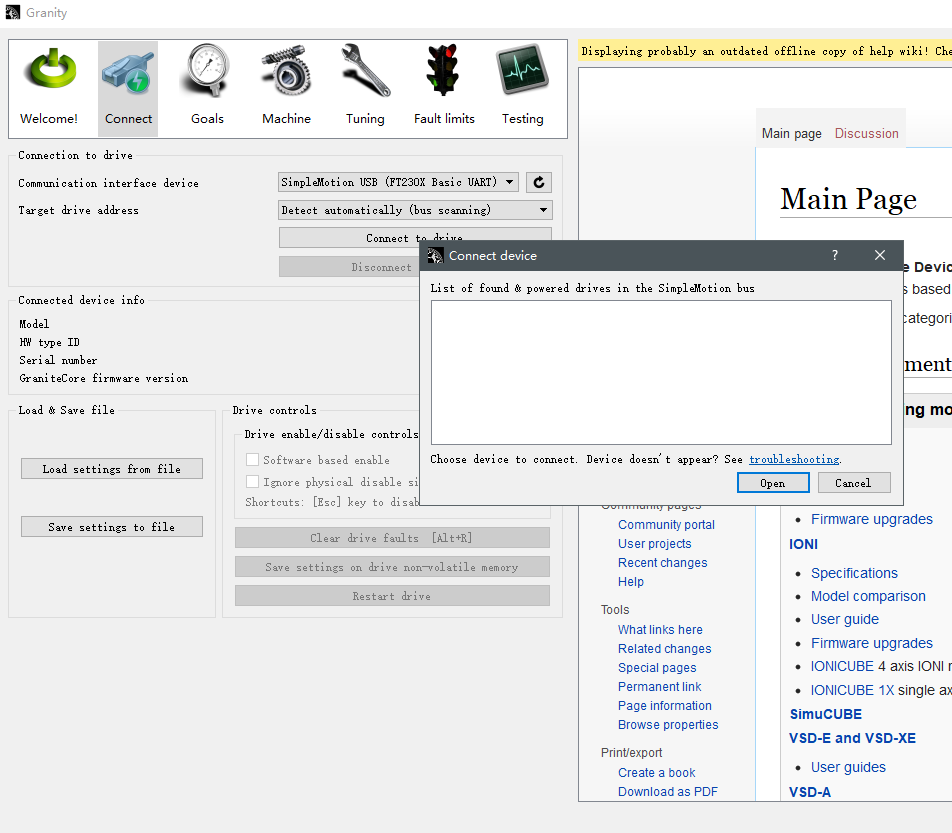
When you click the down-arrow in the Connect tab in Granity, for the Communication Interface Device, it should give you some options with a COM Port number next to it…does it? Otherwise the communication interface is not correctly installed.
If it gives you a device with COM Port number there, select it and scan the bus to see if it brings up the Ioni…
@Mika: Yes, I am trying him to establish working connection to Granity, so we can see settings. Then it will be simple process to resolve, provided it is a mis-configuration.
[ ] Initialized !
[ ] Error recovering
[ ] Tracking error warn
[ ] Target reached
[X] Enabled
[ ] Run (drive active)
[ ] Homing active
[ ] Braking
[X] Permanent stop !
[X] Voltages good
[X] Fault stopped !
[ ] Ready for use
[ ] STO active
[ ] Safe torque mode
[ ] Standing still
[ ] Quick stop active
[ ] Tracking error
[ ] Over velocity
[ ] Hardware
[ ] Over temperature
[ ] Feedback
[ ] Over current
[ ] Internal comm error
[ ] Power stage forced off
[ ] Under voltage
[ ] Over voltage
[ ] Motion range
[ ] Firmware error
[X] Init !
[ ] Motion
[X] SimpleMotion !
[ ] Configuration
What caused this fault?
Fault location ID1 100201 (info)
Fault location ID2 0 (info)
! = reasons for inactivity[X] GPI 1
[X] GPI 2
[X] GPI 3
[ ] GPI 4
[X] GPI 5
[ ] GPI 6
[ ] HSIN 1
[ ] HSIN 2
[ ] ANA1 as digital
[ ] ANA2 as digital
[X] ENC A
[X] ENC B
[X] ENC C
[ ] ENC D
[X] Hall U
[X] Hall V
[X] Hall W
[X] Soft enable
[X] Phys enable
[ ] Pos feed enable
[ ] Neg feed enable
[X] Home switch
[ ] Clear faults
Analog in 1 1.45 V
Analog in 2 0.00 V
Analog Enc A 1.24 V
Analog Enc B 1.27 V
HV bus voltage 48.2 VDC
Device temperature 27 °C
Actual current limit ±12.0 A
Last limit reason None
Output current 0.00 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=-1 | HWTYPE=11000 | HWSERIAL=-1 | BUILDREVISION=3fffffff
| CEI=2 | UID=1b94d8d3 | SMO=0 | COMMUTATIONCFG=0
| HAO=0 | FBR=1.04858e+06 | FBD=5 | FB2D=0
| TBW=11 | KVP=300 | KVI=30 | KPP=50
| VFF=0 | AFF=0 | PFF=85 | CM=2
| MT=3 | AD=0 | FLAGS=131096 | MMC=12
| MCC=10 | FOC=6 | FOV=50 | FUV=20
| FPT=1000 | FVT=100 | FEV=10000 | FMO=0
| LSF=0 | LFO=0 | AXS=1 | AXT=3
| FFT=0.1 | TSR=199 | TCH=64 | TTR=1
| TBT=0 | CRI=3 | DIV=100 | PIF=2500
| MUL=100 | CAL=10 | CSD=10 | CVL=1000
| CRV=100 | MR=2.985 | ML=8.835 | MTC=1500
| MPC=8 | MMS=1000 | CAO=0 | HOMING=0
| HMV=100 | HMA=10 | HMH=0 | HMT=1
| HHL=0 | HLL=0 | HMF=0 | HSA=0
| HSS=0 | overrideAddr1=0 | overrideAddr2=0 | overrideAddr3=0
| overrideVal1=0 | overrideVal2=0 | overrideVal3=0 | BED=1.5
| BER=0 | BDD=1 | CAPS1=4.19405e+06 | CAPS2=16287
I have renewed.I can link to Ioni.