This is difficult being so close to the improvements the last 2 FW gave but for sure the noise is reduced audio wise and totally gone in feel and dampening and friction are silky smooth.
Ive only tried one car so far for about 4 laps the la Ferrari so its hard to tell due for the above reason. Need to drive some more cars.
Also I dont thing reading about some negative reports last night before I went to bed on the IR forums has helped maybe a bit of negative placebo
Its definitely different although Ill be hard pressed to say what. It took me about 8 laps at spa to stop spinning out at various parts of the circuit. Ive done hundreds of laps here and only occasionally over cook it. At first it was hard to control slides but slowly it became easier than before to catch them.
Unfortunately since the new FW I’ve only tried PC2 for 5 minutes before thinking I cant drive this and AMS but only long enough to test to see if the strength slider was working. Not because its crap but because I can drive on a flat screen any more. Ill try IR since I drove for about 20 minutes on the dirt Lanier.
Edit Thinking about it I only ran IR before the new FW. It feels smoother but the bump stops feel like the bump stops that AC implemented ie a lot of kick back.
But is that due to the new FW or the encoder?, seems more likely its the new FW
IRffb with the skippy is awesome but is that just the FW not sure. Im going to run the whole week with the Sincos and then next weekend go back to the 10K that way Ill have a better idea.
But oh my god the bumps stops are vicious going have to use the bump stops in FW can you turn them off in IR?
This is due to the added points of position control, your steering is now more accurate and intern your tires will generally grip more as they are not being moved as much so what may have been a perfect car set-up before it will usually go loose with a SinCOS… In addition you will usually be able to turn down your filters.
No you can’t turn off the iRacing bump stops but you can turn down the 100% point by going into the app.ini and changing the bump stop degree to something like 20-25 degrees… this will help mitigate a bit.
So Mige SinCos is significantly less noisy at unlimited. I can hear the noise above 680 TBW, but I can’t feel it anymore through the wheel as a sand feeling.
I connected it directly without changing wires and now I can’t get commutation sensor working at all.
Is it NOT available there or I should double check connection?
Granity tells me:
Detecting commutation sensor properties
This will take up to 30 seconds
Invalid Hall sensor sequence occurred (all Hall U,V,W phases either 000 or 111). Is Hall sensor connected? If not, then this is expected behavior.
Commutation sensor feature has been disabled
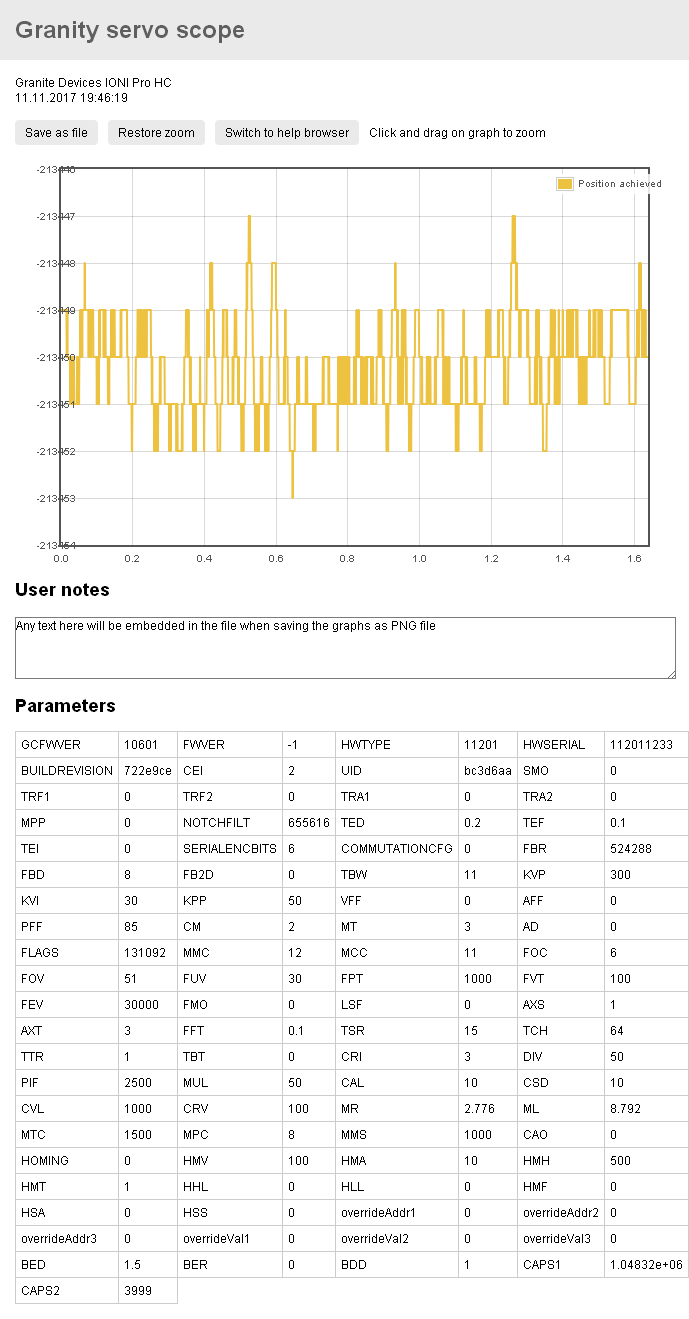
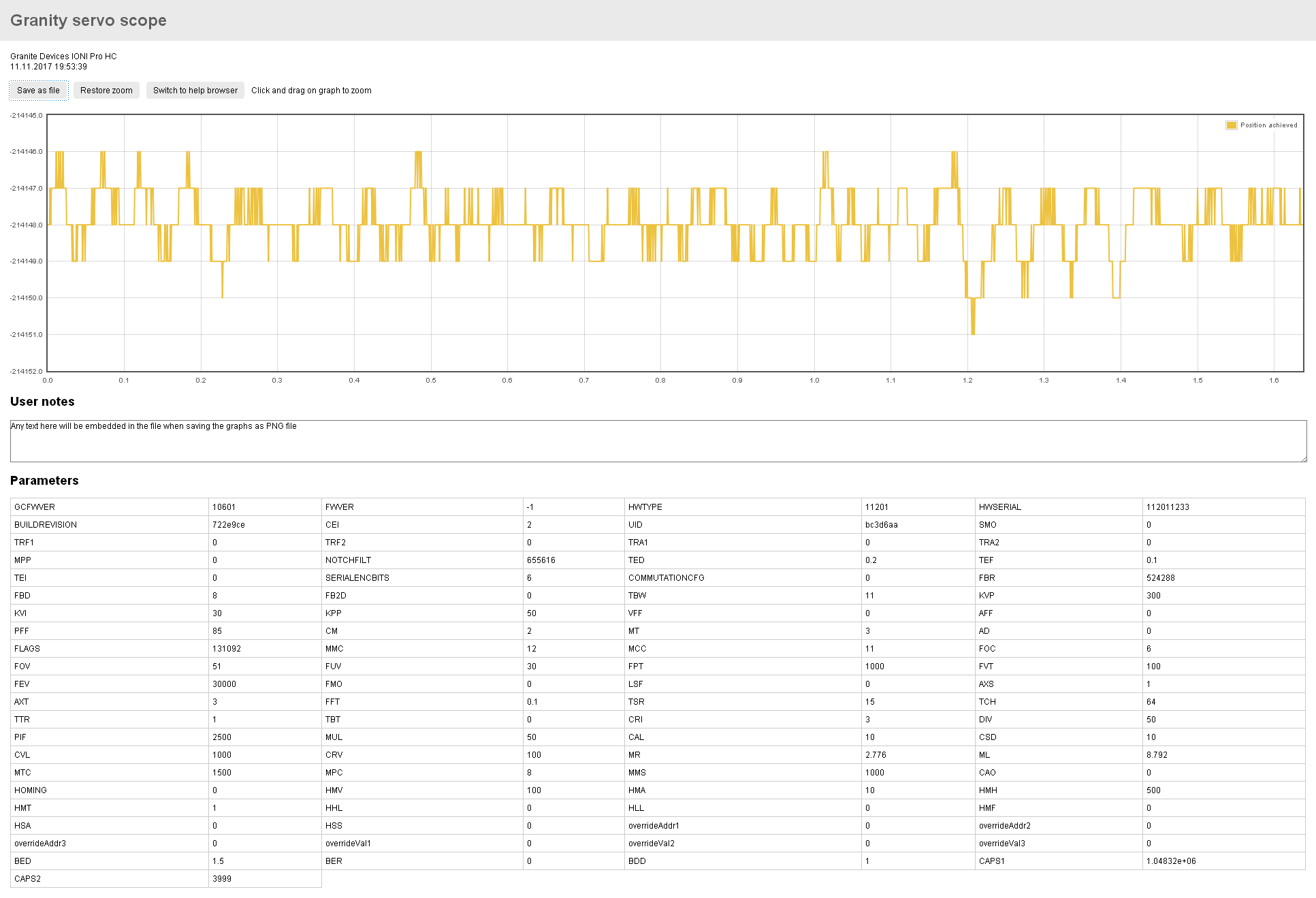
Now sad part - scope of Granity clearly shows constant hi-frequency noise of 3 lowest bits of data, sometimes it spikes to 5 bit. What is worse - it has low-frequency drift which goes up to 7 bits out of 8 bits total! So this added resolution is noise, noise, noise.
I’ve tried to add some shielding, some ferrites, rerouted feedback lines. No improvements so far.
As I’ve said before - it’s not remotely same as high-resolution digital encoder.
My lines may be too long and I should shorten them. But then, again, noise is a problem.
It would be interesting if somebody with German encoder and Chinese could do head to head comparison of noise in Granity scope.
It’s also unclear to me if Simucube or Ioni doing any feedback filtering, so this noise and drift might be adding some artificial feedback that could be likable by somebody. I’m not yet convinced that real resolution is increased.
I will keep studying it by raw data before going into any games.
Right now the only advantage is lower cross-talk noise. But it’s still there.
And it dropped accuracy vs 40K. Don’t mix-up resolution and accuracy.
How do you do it ? could you do a guide for us lesser mortals. This is all way over my head. Edit did a quick google. Which Capture signal do we select cant see one for noise.
Ive got the Tomo SinCos which is german and confer that the noise is significantly reduced. I rolled back to .84 to see if the noise reductions was in due part to the new firmware (as other ppl have noted a reduction in noise) or the encoder. On .84 the noise was the same so it was due to the encoder.