This will be the new standard Mige more than likely once the firmware is finalized. And ok who here has control at Mige. Lol they always seem to get the next thing we need when we need it lol
its hard for me to image a big gain over the 10k encoder. when i just tip my steering wheel with my finger without moving the wheel visually it already registers movement.
High resolution encoders do not shine with increased steering precision. Gained resolution is far beyond human precision.
The benefits can be felt on effects like damping and inertia. These effects need rotational speed as input and generate torque as output. While damping creates an opposed torque (depending on the speed) to stop the movement, inertia creates a torque to maintain the movement.
To measure the rotational speed, Ioni needs to know the position at two distinct points in time. Delta position devided by delta time equals speed.
Now if you want to know the rotational speed several thousand times per second you want to have a high resolution input. Especially during slow movement, SinCos encoders increased smoothness is prominent.
For testing purposes, just apply high daming of maybe 50% and turn your wheel slowly. You will feel some kind of crispyness with a 10k encoder where a 2M encoder will still be smooth as silk.
hmm that’s interesting i never use damper or friction settings i always have them totally off and i swear by those settings!
Its much easier to drive cars on the limits like that.
I would never advice anyone to use damper,inertia settings or anything else.
It just makes the wheel slow and unnatural even with very low amounts.
Anyway, so it would actually matter even less to upgrade my sensor since it mainly would benefit those damper / friction / inertia settings.
Another thing that is much more limiting than the wheel in my opinion is the ridiculous 60hz ffb rate of iRacing.
The SimuCUBE firmware will use the full encoder resolution also for the changing damping, friction and inertia effects that come from DirectInput - although no serious titles seem to use them. Notable exceptions so far are Dirt Rally (changing friction effect) and Assetto Corsa (changing damping effect when on slow speed/stationary).
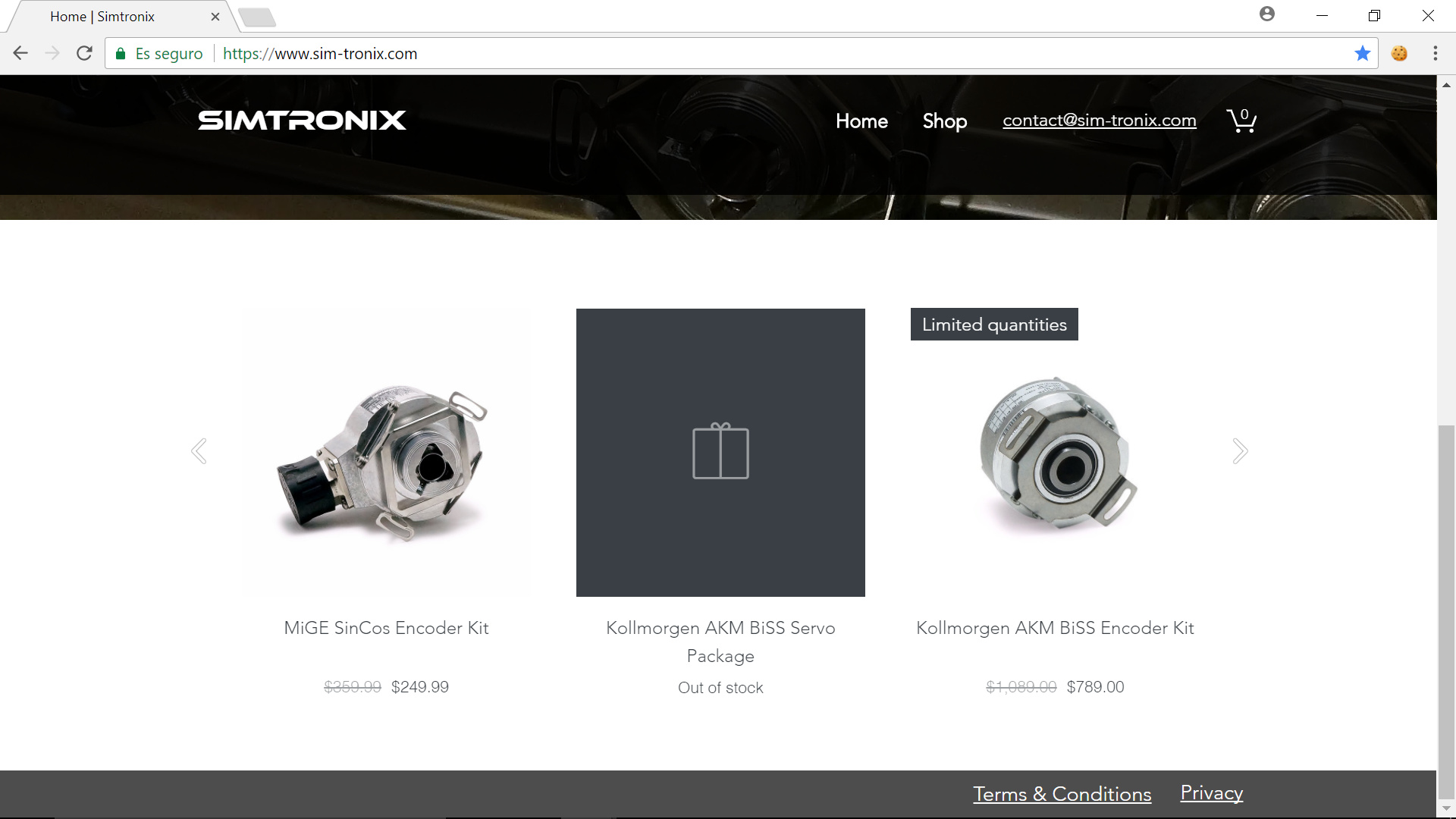
Yep they have dropped in price and 6 of the 30 people that place an order will get theirs free of charge so you have a 20% chance of getting a free one from what I read in the last e-mail update.
They also issued a $15 refund to those who had the cable pre-assembled from the last batch that was released.
I’ve had mine running for the last week or so, I didn’t find a simple “Do this” setup guide but quickly managed to pull the all the useful settings from within these forums to get it up and running.
Only slight issues I seem to have is that occasionally it will fault on power on, and need a restart to wake up correctly (but I’ve not really done much investigation to see where the fault lies) and secondly that it seems to like to return to about 15 degrees off centre on startup, even after a re-calibration (again, not done any debugging on this yet)