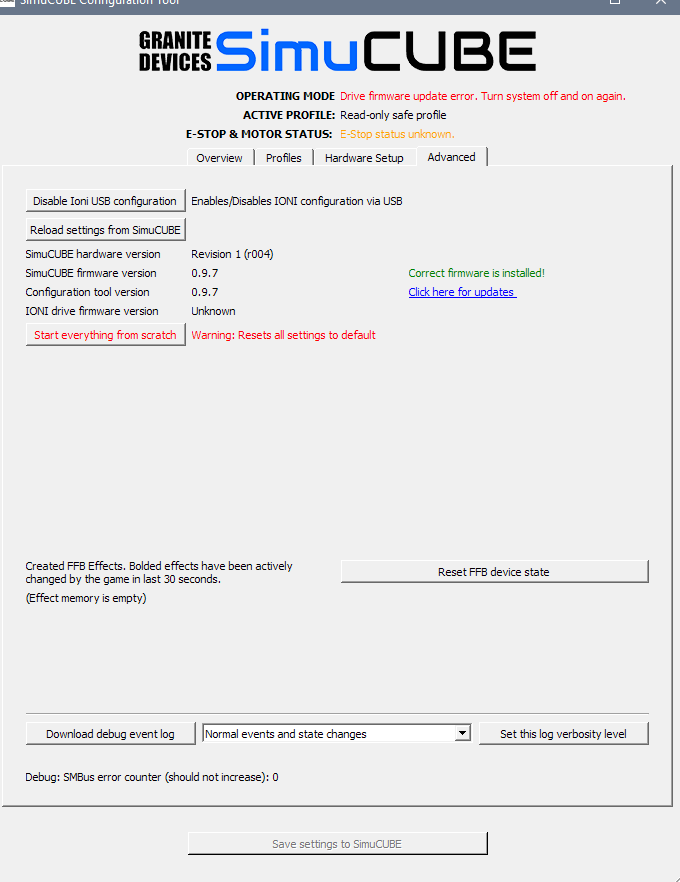
So I have upgraded to simucube but have this error firmware version 0.9.7
Windows 10 does see my device as a Simucube. any ideas?
Did you read the installation guide? This can be caused by having too old IONI firmware version, or you have SMO (bus address offset) something other than 0 in Granity settings.
Oh poo its the firmware  I have tried the process after using version GC 1.7.2 and re did the simucube firmware but still gives me the error.
I have tried the process after using version GC 1.7.2 and re did the simucube firmware but still gives me the error.
Click the Enable IONI USB Configuration button on the advanced tab. Then connect to drive via Granity and check the SMO (Bus Address Offset) setting.
Yer done that its at 0.
That is very strange then, the connection should work. Have you tried power cycling? Does the Configuration Tool immediately show that it can not connect?
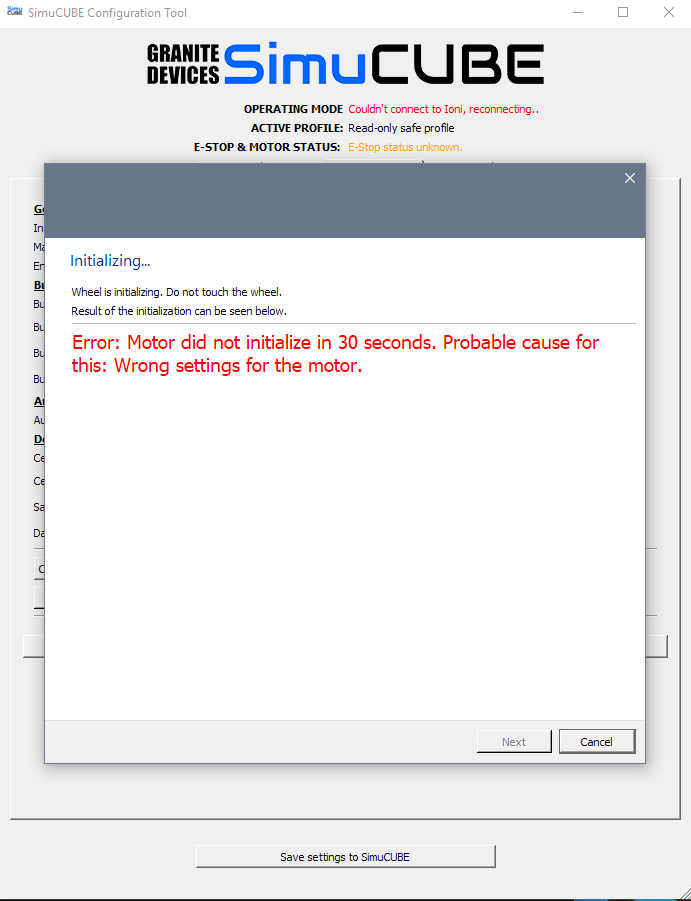
Yes when I click to start the process it has Motor initializing the it disconnects after 2 seconds.
After a power cycle it shows this
Ah yes, Please check which IONI firmware version you have installed?
You can turn system off, then on again, wait a short while, and then click the Download debug event log -button. This would tell me where it goes wrong…
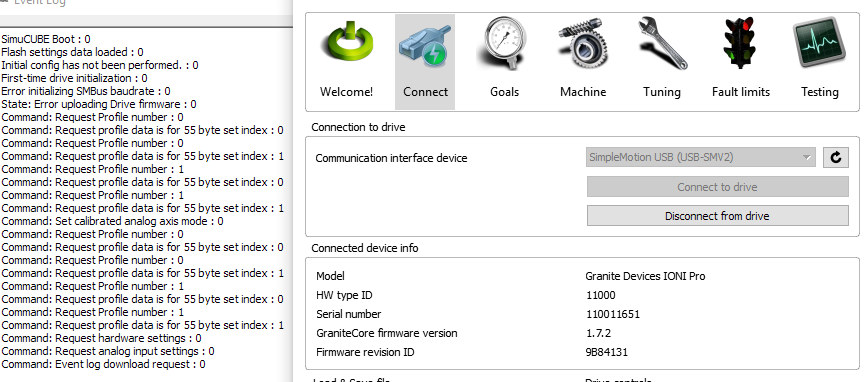
ah, you have Granity connected at the same time? That will not work, you can have either the firmware connect to IONI or Granity, but not both.
SimuCUBE Boot : 0
Flash settings data loaded : 0
Initial config has not been performed. : 0
First-time drive initialization : 0
Error initializing SMBus baudrate : 0
State: Error uploading Drive firmware : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 1
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 1
Command: Set calibrated analog axis mode : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 1
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 1
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Command: Event log download request : 0
Command: Start event logging : 0
Command: Disable all force generation : 0
Command: Unset initial config done : 0
State: System not configured : 0
Error in Disable SM Watchdog : 0
Command: Set hardware settings data : 0
Command: Activate profile number : 0
Command: Restart drive : 0
Command: Initialize drive : 0
State: Initializing Drive : 0
Error initializing SMBus baudrate : 0
State: Drive connection error : 0
Error initializing SMBus baudrate : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 1
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 1
Command: Set calibrated analog axis mode : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 1
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 1
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Error initializing SMBus baudrate : 0
Error initializing SMBus baudrate : 0
Error initializing SMBus baudrate : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 1
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 1
Command: Set calibrated analog axis mode : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 0
Command: Request profile data is for 55 byte set index : 1
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 0
Command: Request Profile number : 1
Command: Request profile data is for 55 byte set index : 1
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Error initializing SMBus baudrate : 0
Command: Unset initial config done : 0
State: System not configured : 0
Error in Disable SM Watchdog : 0
Command: Event log download request : 0
When you did that, did you have Granity open or not?
Yes Granity was closed. thanks
Check your PM’s on this forum, lets try to solve the issue 
Issue resolved, Kevin had a Discovery-based setup, so it will not work.
Is there a guide on how to flash MMOS with ST-link to Discovery? I’ve never done that, but I think we should have a link somewhere on this forum.
Beano’s brute force 2 post on the iracing forum has it.
Hey guys…
I’ve got this error also…
exactly the same issues… IONI updated and simucube firmware updated…
Just won’t phase and initialise…
MMOS was working perfect!
Any help is appreciated
SimuCUBE Boot : 0
SimuCUBE Boot : 11
SimuCUBE Boot : 0
Flash settings data loaded : 0
Initial config has not been performed. : 0
First-time drive initialization : 0
SMBus baudrate initialized successfully : 0
Drive init stage 1, position : 0
Read MMC value from Drive : 2000
Read Motor Resistance value from Drive : 400
Read CPR from Drive : 10000
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
State: System not configured : 0
SM Watchdog disabled successfully : 0
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Set calibrated analog axis mode : 0
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
Command: Set settings not changed : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
State: SM Bus released successfully : 0
Command: Regain SMBUS : 0
State: Regaining SMBus : 0
SMBus baudrate initialized successfully : 0
First-time drive initialization : 0
SMBus baudrate initialized successfully : 0
Drive init stage 1, position : -3
Read MMC value from Drive : 2000
Read Motor Resistance value from Drive : 400
Read CPR from Drive : 10000
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
State: System not configured : 0
SM Watchdog disabled successfully : 0
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
Command: Disable all force generation : 0
Command: Unset initial config done : 0
Command: Set hardware settings data : 0
Command: Activate profile number : 0
Command: Restart drive : 0
Command: Initialize drive : 0
State: Initializing Drive : 0
First-time drive initialization : 0
SMBus baudrate initialized successfully : 0
Drive init stage 1, position : 0
Read MMC value from Drive : 2000
Read Motor Resistance value from Drive : 400
Read CPR from Drive : 10000
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Command: Unset initial config done : 0
State: System not configured : 0
SM Watchdog disabled successfully : 0
Command: Event log download request : 0
Command: Start event logging : 0
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
State: Saving settings to flash : 0
SM Watchdog disabled successfully : 0
SM Watchdog enabled successfully : 0
State: System not configured : 0
SM Watchdog disabled successfully : 0
Command: Disable all force generation : 0
Command: Unset initial config done : 0
Command: Set hardware settings data : 0
Command: Activate profile number : 0
Command: Restart drive : 0
Command: Initialize drive : 0
State: Initializing Drive : 0
First-time drive initialization : 0
SMBus baudrate initialized successfully : 0
Drive init stage 1, position : 0
Read MMC value from Drive : 2000
Read Motor Resistance value from Drive : 400
Read CPR from Drive : 10000
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Drive init stage 4, phasing, current position : 0
Command: Unset initial config done : 0
State: System not configured : 0
SM Watchdog disabled successfully : 0
Command: Set settings not changed : 0
Command: Event log download request : 0