Sorry guys for the life of me I cannot find files for my small mige biss encoder running on an ioni drive. I see plenty of argon files, but I am looking for a place to start. My drive doesnt seem to want to start up, when I try to connect, it conitnually wants me to restart it.
@bsohn I am not a member at iracing, nor do I want to be, yet. I dont do any nascar or indy racing at all. Yes I am getting overcurrent faults on my simucube, running it at 24v. I literally have 40amps of 24v available, and the drive thinks its over currenting.
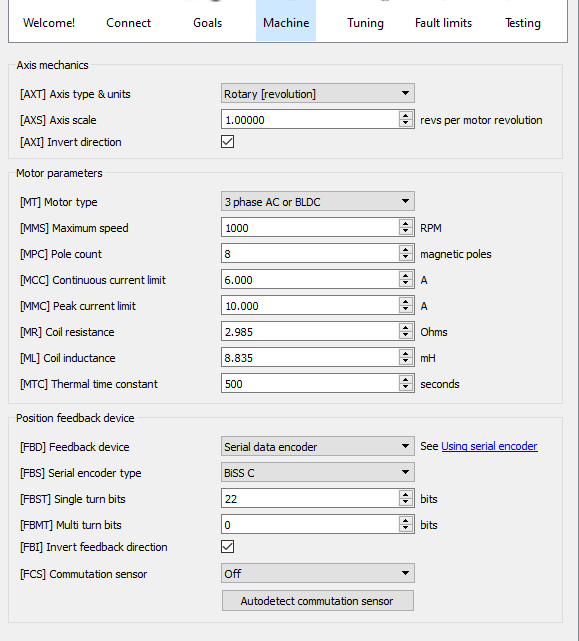
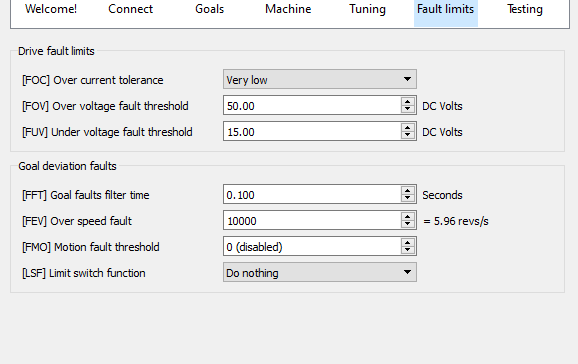
the problem is that you have set the fuv way too low . Set fuv at 22 and fov at 26 . and ofc foc at max . Also change the Mmc at 8 and Mcc at 7 . You are voltage limited so you can’t set Mmc that high probably.
@Loukas_Bourdas is correct with the Small Mige being voltage Limited at 24V… your MMC should be @ 8.44 and that will provide 13.13Nm to the wheel. While it may be possible to push the servo a little further it will tax the Servo a bit as it would be out of spec… Having a low MCC is not an issue it can be really low 6, 5 whatever it just has to be at least 1 - 1.5A below MCC… It is a backup parameter for the Servo but in our use we don’t ever really use it. As for the FOV and FUV you, with a 24v supply you should be at about 26V but you don’t need to be as the IONI boards can handle about 51Volts before going into self protect mode… So 50 is fine… I belive your FUV is also ok. I can’t remember the IONI minimum but I thing it was around 10V before it would shut down automatically.
The main thing though to stop fault issues would be the FOC being at Maximum instead of Very Low.
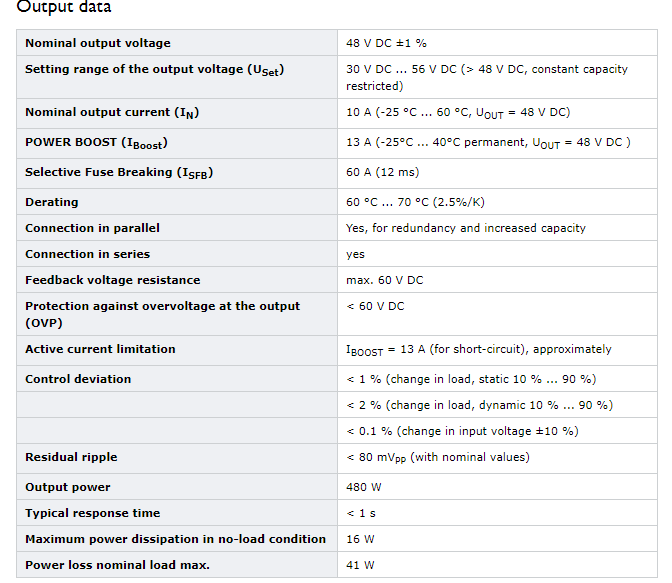
Hey guys thanks so much for the help. I now have a 48v supply, that can output 10amps, with a boost of 20amps. A phoenix quint power. How should I adjust my settings to accomodate? I already set the high voltage fault higher. I also have an ioni pro HC driver board. I do have a noctua fan blowing on it, but there are no heatsinks. I am surprised by that. I need to read more on the wiki about bumpstops and the current values, as I want very hard bumpstops but not as much force feedback. Also i am running a small mige motor. Thanks again
Jason
LOL it has been so long since I have really had to set one of these up at the low level… But yea My earlier 20V min was probably correct as that came from Granite as to what was best… so 20 - 22 would be good… The 24V PSUs sort of have the opposite issue of the 48V in that each push the bounds of operation in different directions…
Normally if you are Faulting on the FUV it is because the system is allempting to overdraw the PSU causing it to lower voltage to try to keep up with current demand until it shuts itself down, where if you are getting an FOV Fault it is generally due to a faulty braking Resistor or component in that system allowing the regenerative nature of motors to push the voltage higher than optimal.