what values do you have now for mcc/mmc ? we could help eliminate that undervoltage error upon cold start.
19 MCC
20 MMC
Reading through a post from Brion over here: Can’t run higher amps without undervoltage
It’s most likely I’m just getting tripped up due to those values being close together. I’ve tracked down the DRC files mentioned in that post and hope to review them sometime today and test a bit. Have to complete house chores first though 
Granity does warn against a value lower than 20V for the FOV/FUV settings - I set as you suggested, as I have a 24V PSU. Safe to ignore that warning? Obviously worked well with those settings, but my electrical engineering skills are not strong so missing a lot of the power/amperage/resistance stuff and therefore assuming.
Thanks!
Ok so my Fuv setting doesn’t work as intended , so best to use Fov=20 that works for you. Does Fuv=27 work ok ?
Maybe try Mcc 18 and Mmc 19 , because i don’t think that the problem is that those values ar close but maybe 20 is a bit high with the winding resistance of your motor.
Thanks Loukas - will make changes and report back. Will also report MR/ML values. Which I think differed from those I entered during initial configuration from the motor’s spec sheet.
Thanks again!
i think it’s best practice not to use the values from the motor’s spec sheet and use the ones that are generated through “Measure resistance & inductance” button
With a 24V PSU you will have to have an FUV between the 20 low and 24V otherwise the IONI will think it is ALWAYS in Under voltage… There is a point at I think around 10 volts where the IONI will go into protection mode and FAULT with the Undervoltage fault automatically… But it will also do this if FUV is below supply voltage normally…
As for MMC and MCC you can set those to what ever the motor is capable of and that depends on the Servo you have (which do you have?) Setting MMC two high for your servo will burn wattage and overtax your PSU for no reason other than heat… In the .drc files I created I have MCC set to the Rated Average Amps for the servos listed.
If the MMC and MCC are too close together in number there will be times that the IONI will not initialize but that will be it it won’t register under voltage faults or anything like that, Over and Under Voltage are directly related to PSU and Power supply issues EXCEPT in the case where a Braking Resister has blown and OverCurrent occurs due to back current from the servo.
NOTE: the Motor Amps are RMS and Not Peak of Sine which the IONI uses… RMS numbers are lower than those of Peak of Sine
20v for fuv should be ok though , or 21v.
I don’t have the spec sheet for his motor but if he can post the max amps in rms he can multiply it with 1,414 to get his max mmc. Maybe setting it 20 or even 19 is a tad too high and that’s the reason for the heat. If he gets it right i think he will not need the heatsink that he mentioned
AKM52K-ANCN2-00
Looks like the recent Kollmorgen/Danaher brochures no longer call out this winding, so I’m guessing it’s an older model.
Anyways, attached are a shot of the servo’s label, as well as screen shots of the data sheets I’ve found listing it. Here’s a link to a brochure which I captured one of these screenshots from: http://www.diegm.uniud.it/petrella/Azionamenti%20Elettrici%20II/Motori%20e%20azionamenti/AKM_Motor_Selection_Guide.pdf

Even if that Rm= 0.96 isn’t completely accurate , i think that you are not limited from the volts that your supply is providing.
If it gives 24v , then ( 24v / 0.96 ) * 0.92 = 23 , so basically you could provide 23 Amps for Mmc with that Rm if needed . But let’s say that this is not accurate , when you pressed the “Measure resistance & inductance” button , what was the result for MR ?
In any case though you can safely set the Mcc at 8.9 * 1.414 = 12.58 A
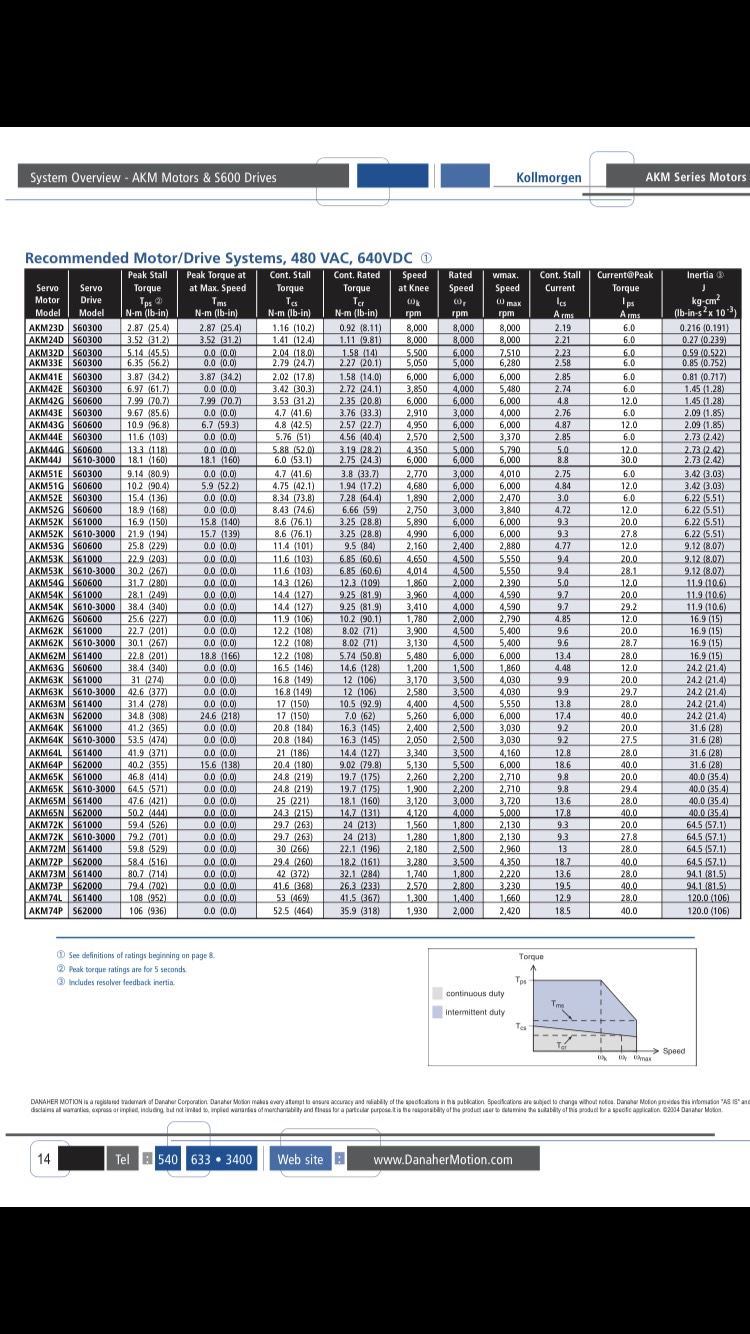
I couldn’t find in the chart the Ips Arms (current@peak torque) for your exact motor , since the ones there don’t seem to match the label on your motor. But you could Try Mcc 12.58A and Mmc 13.58A (or higher) if you want to see if it eliminates the cold start problem and the heat problem. I don’t believe that 1A difference should cause you trouble , i had it at 0.5A difference for a long time with no problems but it is a different motor. Also i do agree in theory with bsohn that mcc should not affect anything , but testing in assetto corsa , having mcc and mmc close to each other gave me a stiffer wheel. Placebo ? Maybe. Feel free to try if you play AC.
This Sigmatek link actually seems to be more relevant.
Peak current of 27.9 - is that what we’re looking for?
Thanks for the advice - looks like I won’t get to testing until tomorrow. Will follow up as soon as I’m able.
It still doesn’t seem corect , since the data doesn’t match the label but anyway , 27.9 amps rms can not be done. Even if ioni pro hc could (it can do 25A peak of sine so roughly 17.6 rms) , as i said due to 24v psu you can go up to 23A peak of sine so rougly 16.2 rms. I doubt you even need to drive with so much power but maybe this info can help you in someway.
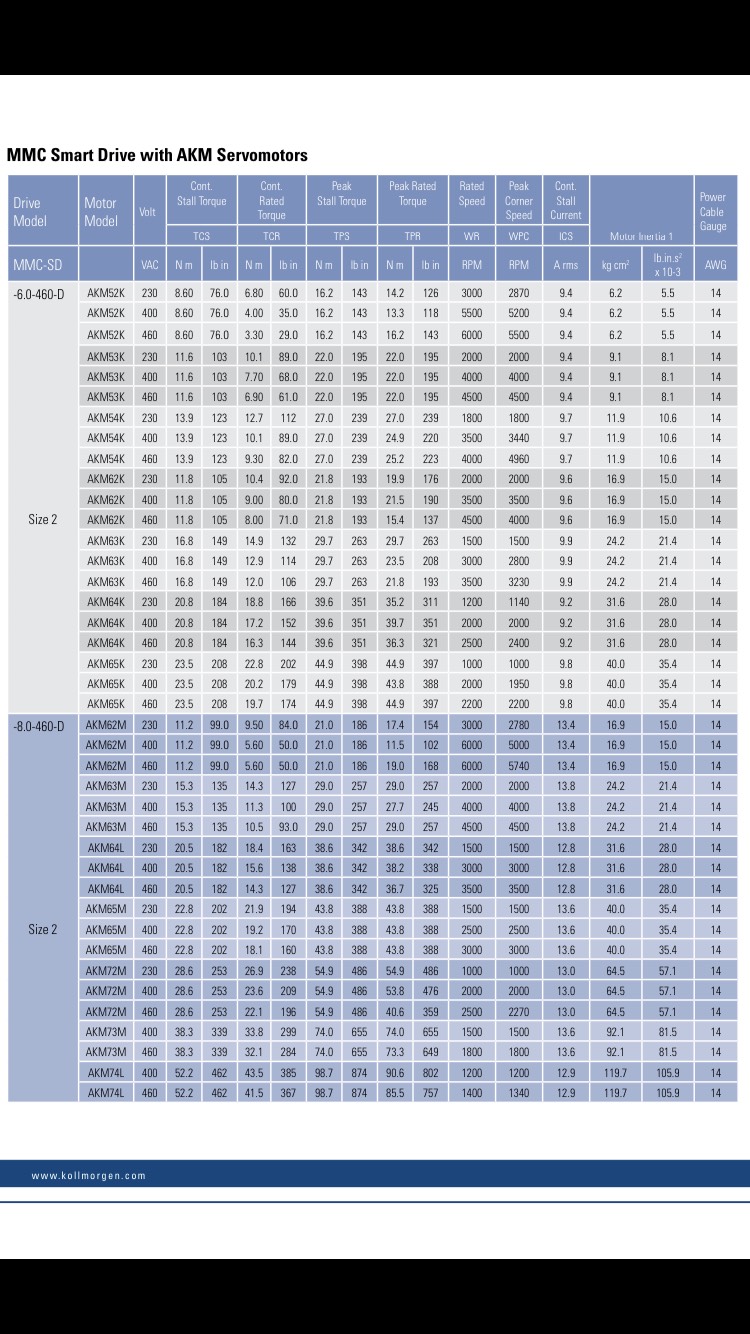
For the 52K based on the Kollmorgen specs…
OK You can run a MAX 24.51A MMC into that servo @ 24v and you will get a Torque output of 16.12Nm .
So I would set MMC at 24.51 and MCC to about 10 - FUV to approx 20 or 21 as Loukas mentioned.
Set the Inductance/Resistance by the auto.
After this point it is up to your power supply to give enough wattage… if it cannot it will have an under voltage Fault… if it can things will run smoothly.
That particular servo is NOT designed for torque and is more of a Speed servo so it is very possible that it will heat up more while trying to produce the torque demanded from it.
Understood - thank you both Brion and Loukas!
Will set as advised, and then back down if it seems the servo is over worked/stressed. At much tamer settings, it’s quite nice, so even if it can’t be full output all of the time - I am very pleased. If I want more power, I can always look for an AKM-G, or Big Mige.
Cheers!
Yes you could but those would also run into possible the same Wattage issues if that is the case… Especially with a Large mine… The Small Mige actually is one of the most efficient servos but the G did Kollmorgens aren’t too bad… The Large Mige is a power hog as well as the K winds … But the K winds are actually better suited to the IONI the 52 though is a pretty Rarely seen K wind but the 53 and 54 K’s are quite good matches as well as if you want serious power the 64 and 65 K and L’s but those are BIG. I have a 72L which is Massive that I haven’t yet had a chance to set-up because I don’t have a rig capable really of withstanding it.
Sorry for the delay in replying - I wasn’t able to get to my rig until last weekend and the day job has kept me busy. Anyways, using Brion/Loukas’ advice above re: MCC/MMC/FUV, I was able to successfully configure (and over a restart) my AKM52K. Feedback within iRacing was amazing, actually bordering on too much - until I get used to it’s characteristics and tune a bit more precisely. I also need to improve my mounting, as it’s in a temporary setup while I build a proper rig.
I’ll post screen shots of my current settings when I next get back to my wheel for anyone else who may be curious. And then I’ll dive into what, if any, additional tweaks need to be done in Simucube software to make sure iRacing/AC/rF are smooth.
Thank you very much to Brion and Loukas for assisting!
Did you end up going with a 24V power supply? I have a AKM54K and wondering if there is a difference in using a 24V and 48V power supply, other than slightly lower torque output with the 24V. If you reduced current to match the 24V, would the 48V power supply basically be the same?
@Roylan: Most of the smaller AKM servos are voltage-limited, thus it is best to stick with 48v psu to get any meaningful torque out of them. I would not use 24V on 52/53/54 series…even with 48v psu, you will be limited and will not see full torque…
You messaged me too, only things you have to change between servos in drc files are basic settings like coil resistance and inductance, speed/rpm and then the type of encoder. Pole-count for all the 52/53/54 akm servos are 5-pair/10-poles…
Wrt filtering, try those generally used for small Mige servos, but as always, you will need to find-tune for your liking.
Cheers,
Beano
1 Like
Just when I thought to message Beano to use his Excel skills to calculate achievable torque, he has already answered. 
Haha, I have those on there, Mika, I can check which exact models…I will reply on those and available torque at max current later today once I get to my laptop 
Thank you appreciate the help, just trying to piece together all the info I find, not exactly common doing these AKM builds anymore. Looks like I’m fine with the SDR-480-48.
I changed everything you mentioned in the DRC files, looks like I can just focus on playing with the filters, 2 more questions if you dont mind:
-
I have found some settings from you/smilen on the AKM K servos, but it was over a year ago, and youre using numbers like dampening 4, inertia 1.5 etc. If I read correctly, in the newer firmware I would multiply these by 10 since the scaling changed? I.E. 4 dampening in old firmware is 40 dampening now?
-
When I use auto resistance/inductance I get some whine from the servo. I get about 1.1 resistance and 4.65 inductance. In the granite wiki under torque control it says you can try halving the measured values and playing with the torque bandwidth to reduce motor noise. Torque bandwidth doesnt seem to do anything, but If I lower the resistance to 0.6 and inductance to 2.4, my motor is silent. Does this have a negative effect on the servo at all?