Here’s the problematic situation: imagine an oversteer situation. You catch the slide, and then have to straighten the wheel quickly when the rear end comes back in line. In a real car, the straightening takes zero effort due to front end geometry. In fact, if you let go of the wheel it will straighten itself out, because the steering wants to be straight ahead when rolling.
In my SimuCube profile, it takes waaay too much effort to return the wheel to center after catching a slide. It even beeps occasionally due to FFB clipping.
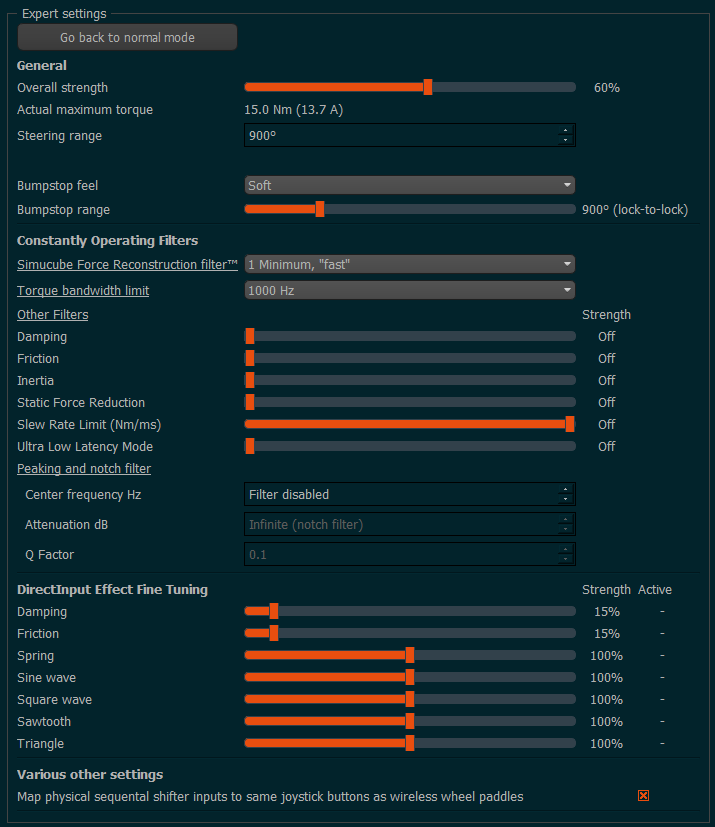
I’m sure it’s a setting I have wrong, and would appreciate any help. Here are my settings:
What sim these settings are for?
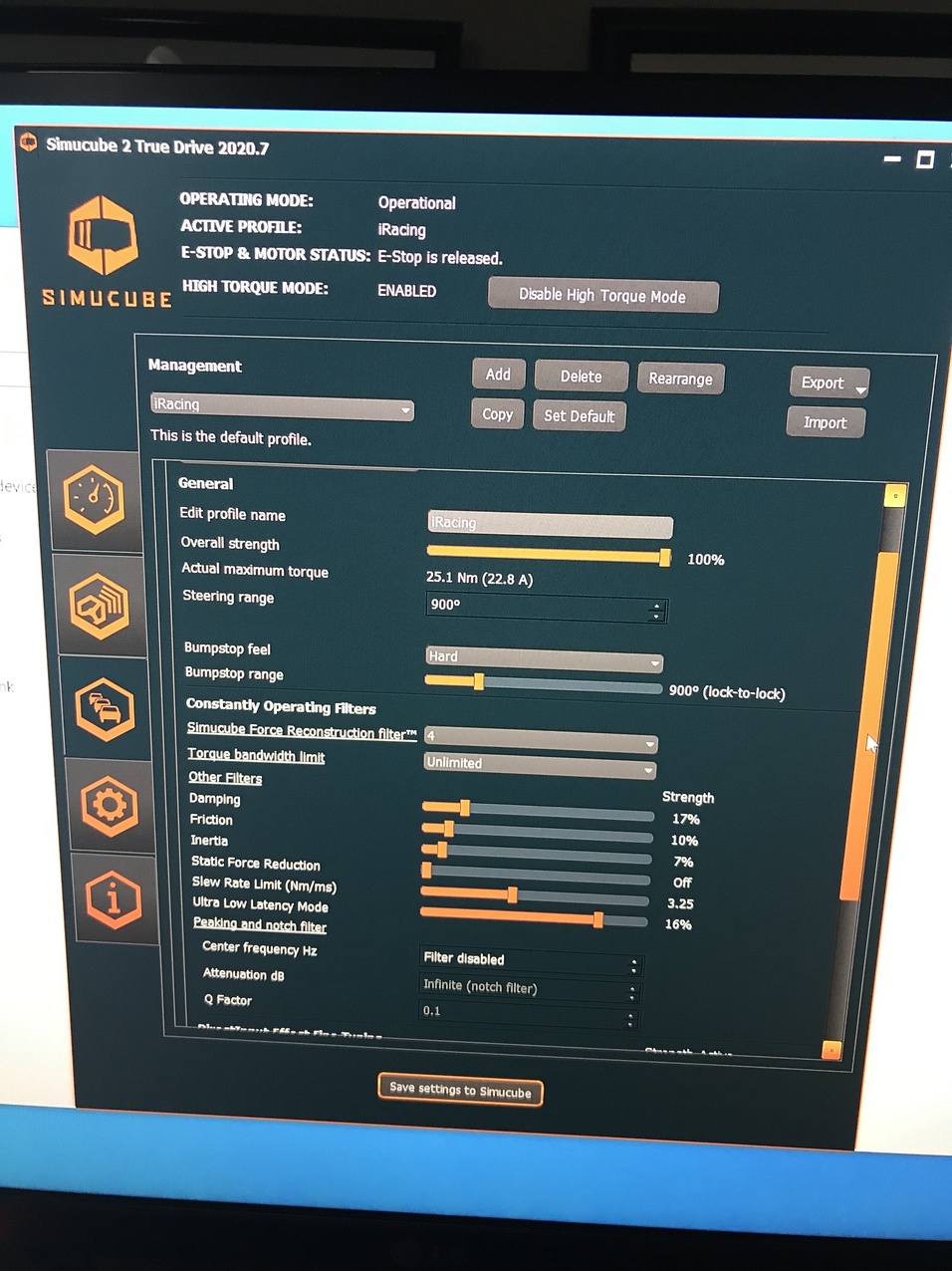
TBW is 1000, set to Unlimited.
DI Damper and Friction, most sims don’t use this effect and even if they do, it’s better just zero them out and use Constantly Operating Damper and Friction to slow and weigh wheel down to control oscillation.
Overall strength, if sim allows proper gain control, it’s better to max it out at TD and lower within sim, that will leave enough room to avoid signal clipping.
Caution: iRacing can go crazy on contacts/crashes, and can spike way above 100% gain, utilizing all available at wheel torque, one of the few titles where lowering TD gain can be sensible.
Imo it depends on simulation, your wheel and car: if you drive rally you can reduce overall force down to 35 to 40 % and increase static force reduction (which results in REDUCING the constant force) you have to fight at long corners. You still have the details of FFB but won’t get tired. On the other hand AC I run with full torque and in-game settings that help me to react very quickly to oversteering. I prefer to set recon to max 1 and (I drive but rally and open wheelers) leave the rest untouched most of the time. WRC titles 9 and 10 are one of the very fiew where you can use fine-tuning filters. F1 titles I can’t drive with full torque, adjust it to your preference. Maybe aswell important: FFB settings which refer to curbs, street, ABS are often artificial and made to increase immersion and sensation
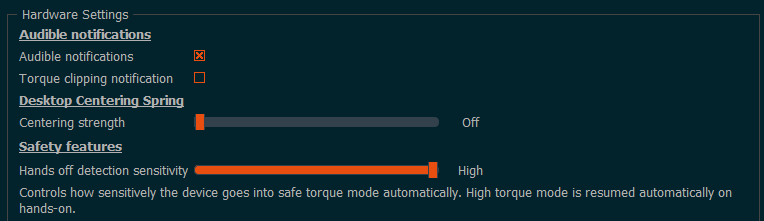
Set hands off detection to low. It kicks in at high when you slide and then it adds resistance to keep the wheel from oscillating. You also hear beeps when this kicks in.
The issue you are having has a lot to do with the speed of a direct drive wheel when there is no filtering involved… Generally the car is straightening the wheel or you but because a direct drive wheel is basically frictionless the signal for return movement comes at full speed so generally there is no return to center feedback being felt through the wheel… This leads to a situation where you are not guiding the wheel back to center as you would in a real car but the wheel is snapping back to center effectively overshooting where it should be and causing an oscillation which you have to fight to remain in control of resulting in too much effort on a return to center…
With these setting I can generally take the hairpins and just let the car come back to center with a little security friction from my hands on the wheel (much like a normal car).
This is one of the areas where you NEED filtering to control the servo… though many believe the best feedback comes from no filtering TRUST ME it does not…
BTW these settings are before Paddock and would be placed in the expert settings… These have never been uploaded to Paddock by me because I just don’t really like it… though there are others that have uploaded to paddock that have similar settings.
I am convinced that sharing settings for a simulation only make sense if:
—TD settings are taking the in-game settings into consideration. Profiles with full torque can cause severe problems if Fe the receiver has 100% gain in-game while the provider uses Fe 50%.
— Most GT cars have power steering, and some use TC/ABS and other systems, while F1 cars have a total different approach. The difference to other cars is like a Mazda even bigger.
—The weight of the steering wheel in use, materials used to build it, it’s size, the overall quality and even shape will interpret settings coming from TD very different. Weight distribution of the steering wheel is another factor often is underestimated.
— Even in the situation where everything is identical, at least 3 important poinst still have the power to make a profile senseless . It’s the car setup, the track in use and track conditions.
PS: compared to real motorsport TD is representing the car chassis and has therefore only a handful of important and fundamental settings, which all are dealing with 1 parameter: torque. In-game settings have the focus on setting up a car based on track, weather, if it’s training, qualifying or race. The number of possibilities is sheer endless. So to starting with TD is something we won’t see in real racing teams.
Just as @CLAYREGAZZONI I am convinced @bsohn that your settings can be very good, only for one game and one car, having the chance to play a DD is that it is possible to create great configurations, if you play a game and only one or two cars then the filters can become interesting to deepen, but the problem begins, if like me the player plays ASSETTO with its many cars, then there should be a setting per car, imagine the number of saves it would take. … moreover I find that the filters bring a certain latency in the driving and then if we really adjust the steering wheel as in a real car, the boredom will quickly be felt in the games, because in a car the feedback that goes back from the steering wheel, is almost non-existent.
So after spending months testing different settings I have come to the point where I no longer use any filters, I simply adjust the strength of the gain and the FFB in the game as well as the strength in TD, so I find my FFB is magic.
I am not sure what you are getting at… I use the settings that I post across the board for pretty much every game I play AND every car I use… so for me they are universal… Granted the Sim I play most is iRacing so I don’t have a Dedicated Assetto Setting. but the main thing is that you will need to turn the Gain down to your usable force in Assetto as they run their feedback system on a Baseline-Gain model rather than the Attenuation Window model that iRacing uses.
The Reason for the filters is NOT to tune the car and the feel of a “certain car” (though some do this and have per setting cars). The reason for the filtering is to eliminate or neutralize the Feedback “coloring” that comes with the hardware of the steering device and its software… This “coloring” is present in all wheels and affects the way things feel, hence why a Fanatic DD feels much different than a SC2 Pro, which feels different than a VRS DFP. It is NOT due to the feedback coming from the game as the games know nothing about the wheelbase you are using.
In an ideal world the Feedback device filtering would be controlled by the game to give a consistent “feel” to all devices, However, this is virtually impossible to do without the game having direct knowledge of every piece of hardware out there AND staff to be able to tune them to achieve the same feel. Direct Input Filters do allow the sim some active control over filtering but again intensity of those effects are controlled by the user because again the game knows nothing of the wheel you are using so one wheel may need the effect while another does not in order to overcome its own – again – “coloring” of the signal.
The End Goal of filtering is to filter out the “coloring” which gives your wheel a consistent baseline for recreation of the game output… IF correct or close to correct you will never have to change your wheel settings as what you get from the Game will be what is intended by the Digital Model of the car used.
When you do use NO filters you are basically baselining your setup at what the wheel dictates that Feedback should “feel” like which from my experience (which is extensive) is not a realistic car feel but generally offers up a hypersensitive active feel which is not very realistic in nature and can lead to some feedback issues when the sim is trying to make things physically realistic. (such as return weighting of the wheel and sensitivity to road changes).
Feel is a personal preference and it should be set where it feels most comfortable to the user at hand… But the understanding that what you are getting in most cases when NOT using proper filtering is generally covering up a lot of subtle details in the feedback which DD wheels are capable of providing when tuned to attempt to be as true to sim output as possible.
And NO I am not saying it is easy to set the filtering properly and it takes understanding the filters and the effects that each has on the way the wheel performs as well as having some degree of real world racing and high performance driving experience (on track) in different cars under your belt so you can have a feel baseline for what the feedback is realistically attempting to recreate through the wheel AND you also have to have the distinct ability to direct what you are feeling and what you need to, or should be, feeling and then HOPE the device has the filtering ability to get you there.
You have summarized very well and I appreciate answers like yours, as you explain it should have some real experience of a real race car to be able to retranscribe the same feelings on the simucube, unfortunately I do not have this experience of real race, I can know in advance what the filters are used for, but it is rather complicated to assemble such filter with another, I am contains that my setting of TD is perhaps not realistic, but such as they are it allows me to feel what the car does in its reactions.
I’m going to test these next days your settings, I’m curious and I like to try different settings to learn what some like you try to make feel their settings.
I hope that the message will be understandable because it is not easy with a translator.
And thanks again for your message.
Yes it is and in the end it does come down to what you know and what from the wheel as far as feel… Some of the things that do happen with a setup that is overly active is that subtle nuances such as slight grip changes (Under or Oversteer) that sometimes having a signal come through faster than intended will cover. It is not that they aren’t there but they get masked by other motions…
One of the things with sims is that we do not have gForces to tell us what is happening through our butts so we try to get some of those things through the wheel and we want them to be clear… The Problem is in real life the car steering is pretty dead and gives subtle shoves and knocks about the road and how the tires are interacting with the road, rarely are the hits very sharp but they can be… In our quest to have g-Force like feelings many prefer the sharper hits and reactions… Which is a legitimate way to go… Generally when you use sharper feedback you also do have to turn down the force at the wheel as it can become overbearing…
All I would say is give yourself a chance to get used to the steering difference, You may find that you feel more and become faster even though you wouldn’t think it in the beginning because YOUR reactions to what the car is doing become more natural and intuitive.
There would most likely be a change because he base nature of the servos are different, You may even find that there is a small change with different power levels… Slew is actually one of the best filters on the SC2’s as it allows you to slow the reaction to an input through the wheel… 3.25 is where the Pro feels most natural to me but you can lower it to make the wheel more reactive and higher to make it less reactive… It is a great overall feel filter.
The filter itself is most likely of the same tuning across the board… the wide range availible on each model would be most likely due to the relative power differences in the servos as the more power it is probably that the servo will spin up faster meaning you would need more slew to slow it down. but that is where it is weird because all of the servos probably could have had the same range (though Granite chose to give them different ranges) but they would be different settings due to the servo specification and reaction itself (ie Power, Armature Weight, Amperage delivery, etc…)
All I do is using recon off or 1, in rally I adjust static force because of long corners where I don’t want to constantly fight the wheel at the torque I setted at overall slider. Plus a little bit of the feather direct input, in rally aswell. It doesn’t work for me to maintain all torque available all the time and then have to add damping, friction, inertia Aso to cushion the outcome of this.