Hello Community,
We are trying to use an Argon drive to power a Fanuc Motor with an Alphai encoder. We are using a converter board to get a feed back (http://pico-systems.com/osc2.5/catalog/product_info.php?products_id=27&osCsid=16mn46v4u59gsbkf46hpeplct0)
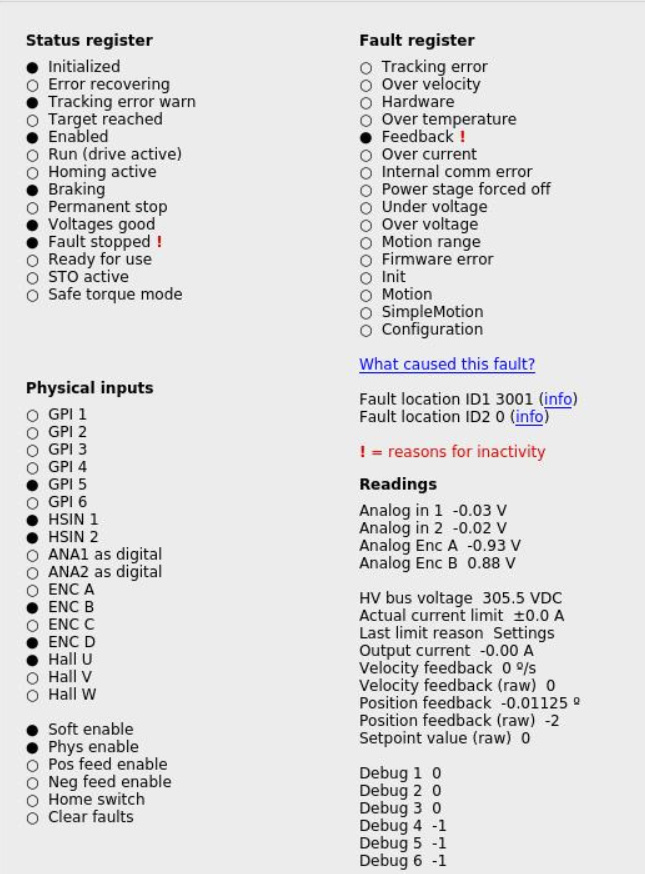
Our position feedback looks good when we capture using The Granity GUI but we can’t run the motor, we have a fault alarm as shown in the screen capture.
Our understanding is that the fault would suggest all Hall sensors are reading high, this is not the case however.
Does anyone have any troubleshooting advice?