Dear all,
I recently completed a new OSW using my old Ionicube 1X + IoniPRO HC Driver + SMV2.
Everything is powered by both a Meanwell SE-600-48 (600V, 48W) for main and RS-25-24 (24V) for the logic.
At the very first start I launched Granity starting correctly via SMV2 but I got into some issues as I changed few values.
I noticed that by setting Overvoltage protection on any value above 48,5V GUI started to display the driver restarting dial. I clicked on apply and restart but that dial appears at every restart.
I’m stuck with an initialization error.
I’m now wondering If anyone can please help me to fill the blanks of the requested current/other value to fix the problem. I think I may have unvolountarily changed some values by scrolling GUI’s pages.
Thank you in advance
what is the code for the initialization failure?
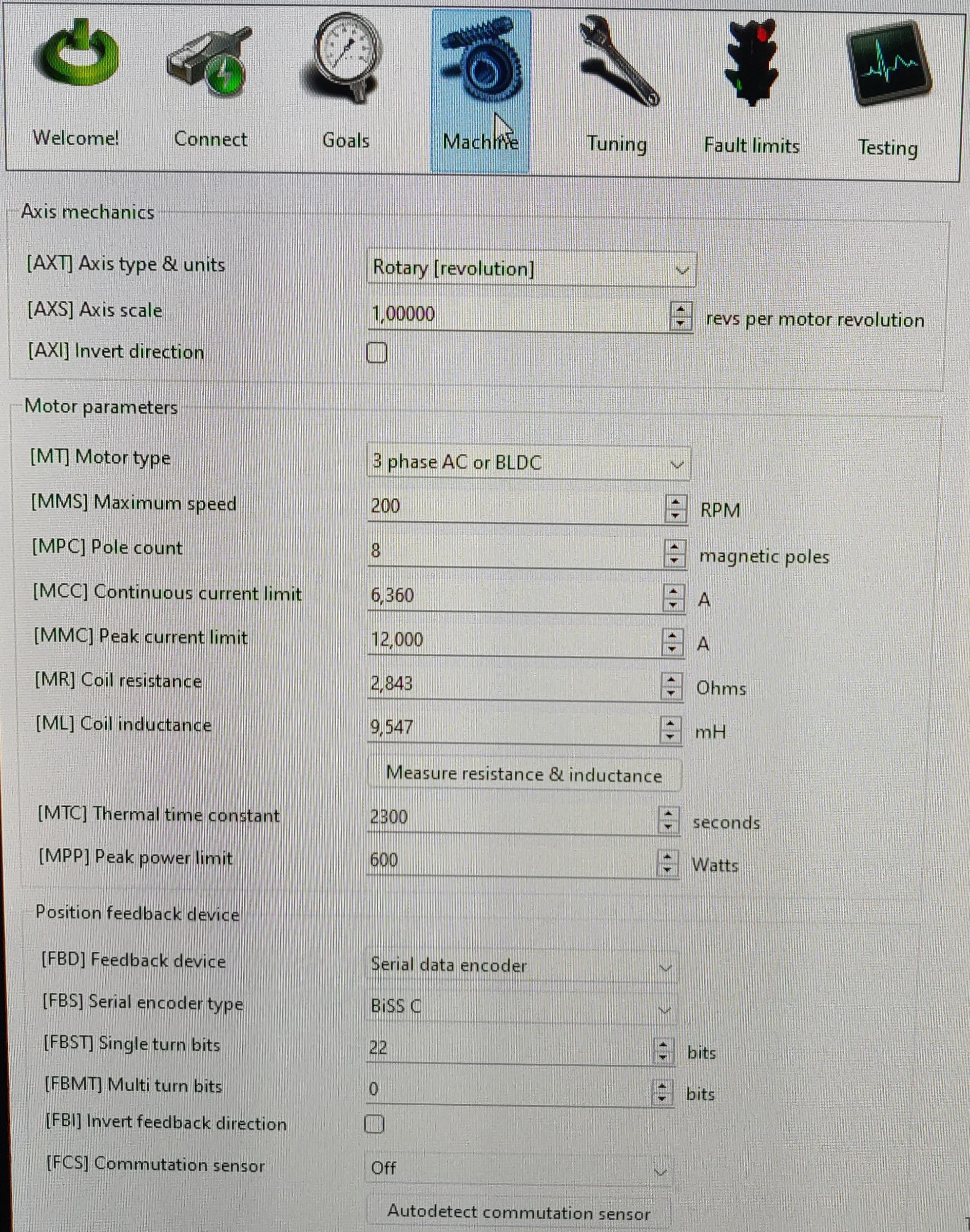
These settings don’t seem correct
As soon as I changed MCC & MMC I was able to initialize correctly thus I could launch the auto measurement for resistance and inductance.
I can’t see any fault till I try some absolute/incremental test through Testing-tab. Motor shaft stands still even when i click on “stimulus” test.
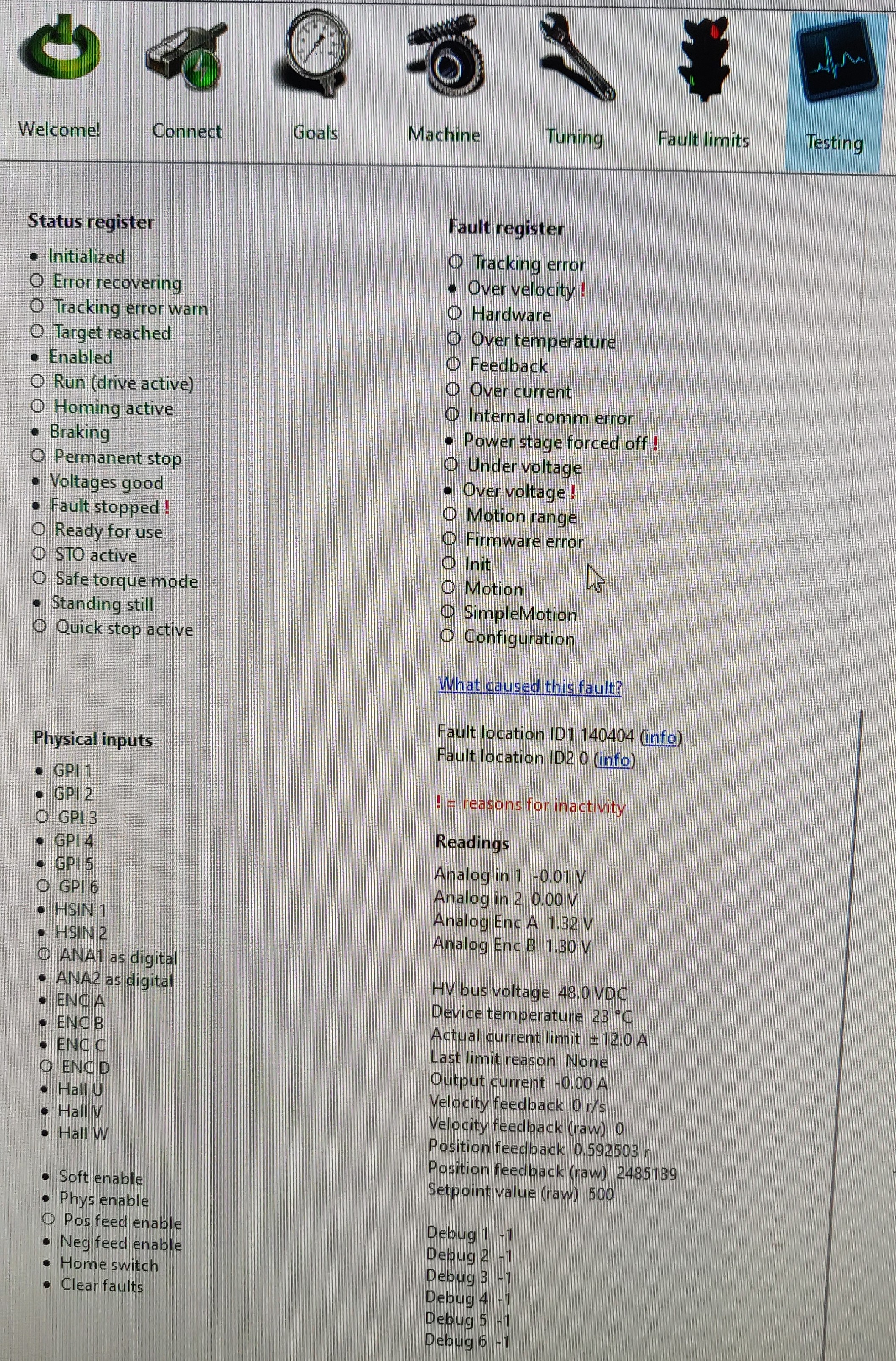
Everytime I launch a test nothing happens but if I try to move the shaft by hands Granite gives me Overvoltage error (sometimes + velocity error) + power stage foced stop.
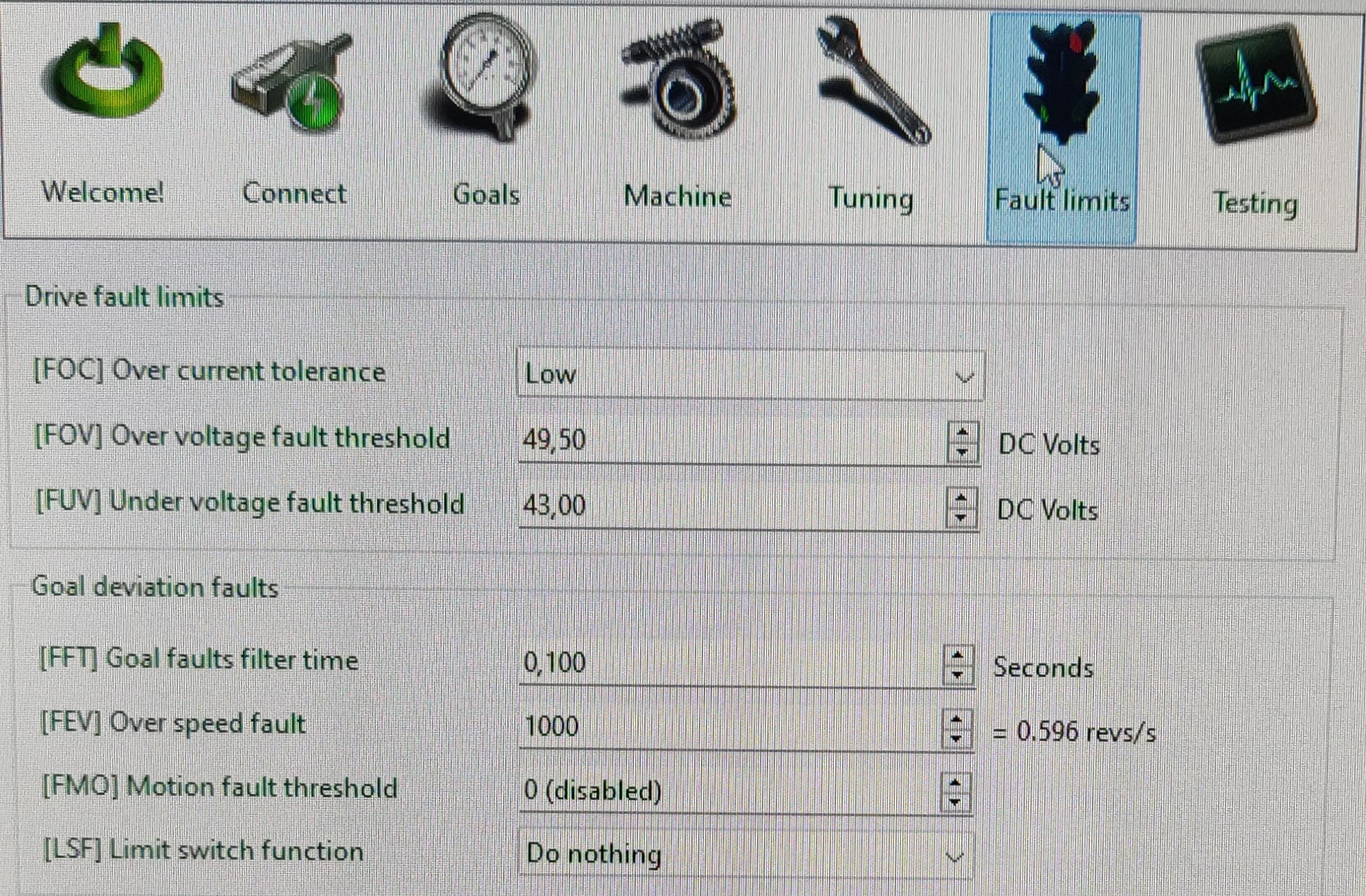
FOV & FUV values seems to be correct to me (As previously said I’m using a Meanwell SE-600-48, which is also suggested in the wiki).
Encoder is a Mige’s one. A Yuheng Optics “JKD-4-22PF-G05BL-B-0.3m” Biss-C (Supposingly 22 bits).
I noticed that the tests works when i set the bit count to “7” but I have the same Overvoltage error as soon as i click the stimulus test button. In this case I don’t have to wait till I move the shaft with hands.
I can’t fix this situation by myself. Do you have any advice/suggestion?
I’ll leave down here some pics of values and status.
thank you all again.

Which FFB firmware are you intending to use?
You can increase the over velocity fault to indicate 6 rev/s.
Also, overvoltage fault threshold = low will produce overvoltage faults quite often. Increase it to High.
I forgot to flag “invert feedback direction” in machine tab*
However I increased over velocity limit and now everything works without errors (I also tried to change FOC values from Low to High and both will maintain the situation stable).
The strange thing is that Absolute STP & Incremental STP tests are giving the same response because the shaft rotates continuously for both.
Moreover stimulus test will generate an alternate rotation in one direction only even if (I suppose) the test is meant to verify the directions changing.
I’m considering to use open FFBoard firmware.
This is expected.
With absolute set point you can set any torque level you want, and with incremental setpoint, the current setpoint will be incremented by the value indicated in the user interface. For example, if current setpoint is 0 and you set absolute setpoint 500, then the same result can be done with having 500 as setpoint increment and incrementing setpoint by that.
I would set mms at 1000 and i would not use mpp. Foc and fev should be at max. I would also set fov at 50 and fuv at 30 as it doesn’t go hand to hand with your psu specs. I would also increase mcc at 11
If you want to use open ffb firmware you also need the openffb board.
The response of the motor is correct then?
How can I obtain a tilting effect from left rotation to right rotation by using stimulus test?
I’m unfortunately not that expert =(
Yes, i also set 0 in MPP blank but same situation.
Not tried to increase MMS value yet.
Have to try changing FOV & FUV
MCC not increased yet. Is it good for small Mige (M100-10)? i found these current values on the net.
Open FFBoard and tranceiver ready.
We used to set mcc and mmc with a diff of 0.5 to 1 A . So if you want to use mmc at 12 i would set mcc to 11 or 11.5 . 12 A is not the max for this servo
Ok, good for me to know! thank you very much for the advice
which parameters are wrong
i was talking about photos g1 up to g5 , the other photos from 2021 are correct. sorry for the mixup
I tried to change the values @Loukas_Bourdas suggested but The situation is the still the same.
MMS at 1000; no MPP, FOV at 50, FUV at 30, MCC at 11A
I can’t understand why the stimulus test only gaves me an alternate impulse of rotation always in the same direction instead of inverting it.
I expected to see the shaft rotating left then right and viceversa repeatedly but I can only obtain right-right-right.
If this is working with open ffb board , maybe ask in their discord channel ?
Quick Way…
If you have an iRacing subscription:
Go Here:
https://members.iracing.com/jforum/posts/list/3573261.page#10702255
Download the Small_Mige_drc.zip package from the post.
Recalibrate your System uploading the 10010_MAX_unlimited_48v_BiSSc(22bit).drc as your initialization DRC instead of the “Use Existing IONI Profile”
These have all been proven to work…
If you don’t have an iRacing subscription email me at simulation@penguinrc.com and I will get you the correct file…