I get error ID 192002, and when I press “Software Based Enable,” nothing happens, and “Clear Faults” doesn’t work either. I then read through https://granitedevices.com/wiki/SimuCUBE_troubleshooting and took a few measurements with the multimeter, and I didn’t get any values for x2. Everything else worked.
I have pointed this topic to Esa, he will reply when he can.
thank you for the fast answer
My father pointed out that I measured the output of the X2 pad HV bus to the resistor input incorrectly. I measured it again and it seems to be OK. What else should I measure to rule out a hardware error?
Do you get any other fault codes?
What does the testing tab status info look like in Granity after you have pressed the enable button?
before
Initialized !
Error recovering
Tracking error warn
Target reached
Enabled !
Run (drive active)
Homing active
Braking
Permanent stop
Voltages good
Fault stopped
Ready for use
STO active
Safe torque mode
Standing still
Quick stop active
Tracking error
Over velocity
Hardware
Over temperature
Feedback
Over current
Internal comm error
Power stage forced off
Under voltage
Over voltage
Motion range
Firmware error
Init
Motion
SimpleMotion
Configuration
What caused this fault?
Fault location ID1 192002 (info)
Fault location ID2 0 (info)
! = reasons for inactivity GPI 1
GPI 2
GPI 3
GPI 4
GPI 5
GPI 6
HSIN 1
HSIN 2
ANA1 as digital
ANA2 as digital
ENC A
ENC B
ENC C
ENC D
Hall U
Hall V
Hall W
Soft enable !
Phys enable
Pos feed enable
Neg feed enable
Home switch
Clear faults
Analog in 1 1.26 V
Analog in 2 0.00 V
Analog Enc A 3.58 V
Analog Enc B 3.57 V
HV bus voltage 47.9 VDC
Device temperature 24 °C
Actual current limit ±2.0 A
Last limit reason None
Output current 0.21 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=10801 | HWTYPE=11201 | HWSERIAL=112012621 | BUILDREVISION=31a7dc56
| CEI=2 | UID=1ed6c9cd | SMO=0 | TRF1=0
| TRF2=0 | TRA1=0 | TRA2=0 | MPP=0
| NOTCHFILT=668315 | TED=0 | TEF=0 | TEI=0
| SERIALENCBITS=6 | COMMUTATIONCFG=0 | HAO=0 | FBR=2500
| FBD=1 | FB2D=0 | TBW=6 | KVP=300
| KVI=30 | KPP=50 | VFF=0 | AFF=0
| PFF=85 | CM=2 | MT=3 | AD=0
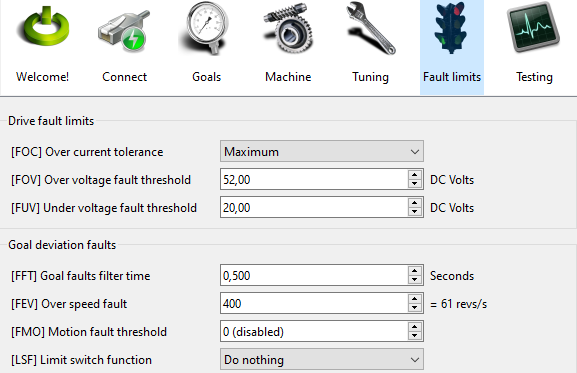
| FLAGS=1 | MMC=2 | MCC=1 | FOC=2
| FOV=52 | FUV=20 | FPT=1000 | FVT=100
| FEV=100 | FMO=0 | LSF=0 | LFO=0
| AXS=1 | AXT=3 | FFT=0.1 | TSR=39
| TCH=126 | TTR=1 | TBT=0 | CRI=0
| DIV=50 | PIF=2500 | MUL=50 | CAL=10
| CSD=10 | CVL=1000 | CRV=100 | MR=0.4
| ML=0.8 | MTC=500 | MPC=8 | MMS=3000
| CAO=0 | HOMING=0 | HMV=100 | HMA=10
| HMH=0 | HMT=1 | HHL=0 | HLL=0
| HMF=0 | HSA=0 | HSS=0 | overrideAddr1=0
| overrideAddr2=0 | overrideAddr3=0 | overrideVal1=0 | overrideVal2=0
| overrideVal3=0 | BED=1.5 | BER=0 | BDD=1
| CAPS1=6.29143e+07 | CAPS2=81823
after that, restart the drive. nothing changes, and without restarting, it looks like this
Initialized !
Error recovering
Tracking error warn
Target reached
Enabled
Run (drive active)
Homing active
Braking
Permanent stop !
Voltages good
Fault stopped !
Ready for use
STO active
Safe torque mode
Standing still
Quick stop active
Tracking error
Over velocity
Hardware
Over temperature
Feedback
Over current
Internal comm error
Power stage forced off
Under voltage
Over voltage
Motion range
Firmware error
Init !
Motion
SimpleMotion
Configuration
What caused this fault?
Fault location ID1 0 (info)
Fault location ID2 0 (info)
! = reasons for inactivity GPI 1
GPI 2
GPI 3
GPI 4
GPI 5
GPI 6
HSIN 1
HSIN 2
ANA1 as digital
ANA2 as digital
ENC A
ENC B
ENC C
ENC D
Hall U
Hall V
Hall W
Soft enable
Phys enable
Pos feed enable
Neg feed enable
Home switch
Clear faults
Analog in 1 1.33 V
Analog in 2 0.00 V
Analog Enc A 3.55 V
Analog Enc B 3.54 V
HV bus voltage 47.9 VDC
Device temperature 25 °C
Actual current limit ±2.0 A
Last limit reason None
Output current 0.01 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=10801 | HWTYPE=11201 | HWSERIAL=112012621 | BUILDREVISION=31a7dc56
| CEI=2 | UID=1ed6c9cd | SMO=0 | TRF1=0
| TRF2=0 | TRA1=0 | TRA2=0 | MPP=0
| NOTCHFILT=668315 | TED=0 | TEF=0 | TEI=0
| SERIALENCBITS=6 | COMMUTATIONCFG=0 | HAO=0 | FBR=2500
| FBD=1 | FB2D=0 | TBW=6 | KVP=300
| KVI=30 | KPP=50 | VFF=0 | AFF=0
| PFF=85 | CM=2 | MT=3 | AD=0
| FLAGS=1 | MMC=2 | MCC=1 | FOC=2
| FOV=52 | FUV=20 | FPT=1000 | FVT=100
| FEV=100 | FMO=0 | LSF=0 | LFO=0
| AXS=1 | AXT=3 | FFT=0.1 | TSR=39
| TCH=126 | TTR=1 | TBT=0 | CRI=0
| DIV=50 | PIF=2500 | MUL=50 | CAL=10
| CSD=10 | CVL=1000 | CRV=100 | MR=0.4
| ML=0.8 | MTC=500 | MPC=8 | MMS=3000
| CAO=0 | HOMING=0 | HMV=100 | HMA=10
| HMH=0 | HMT=1 | HHL=0 | HLL=0
| HMF=0 | HSA=0 | HSS=0 | overrideAddr1=0
| overrideAddr2=0 | overrideAddr3=0 | overrideVal1=0 | overrideVal2=0
| overrideVal3=0 | BED=1.5 | BER=0 | BDD=1
| CAPS1=6.29143e+07 | CAPS2=81823
I also downgraded some time ago and then went back to the latest version. However, since then I have been getting this message when I click on Enable Ioni USB configuration:
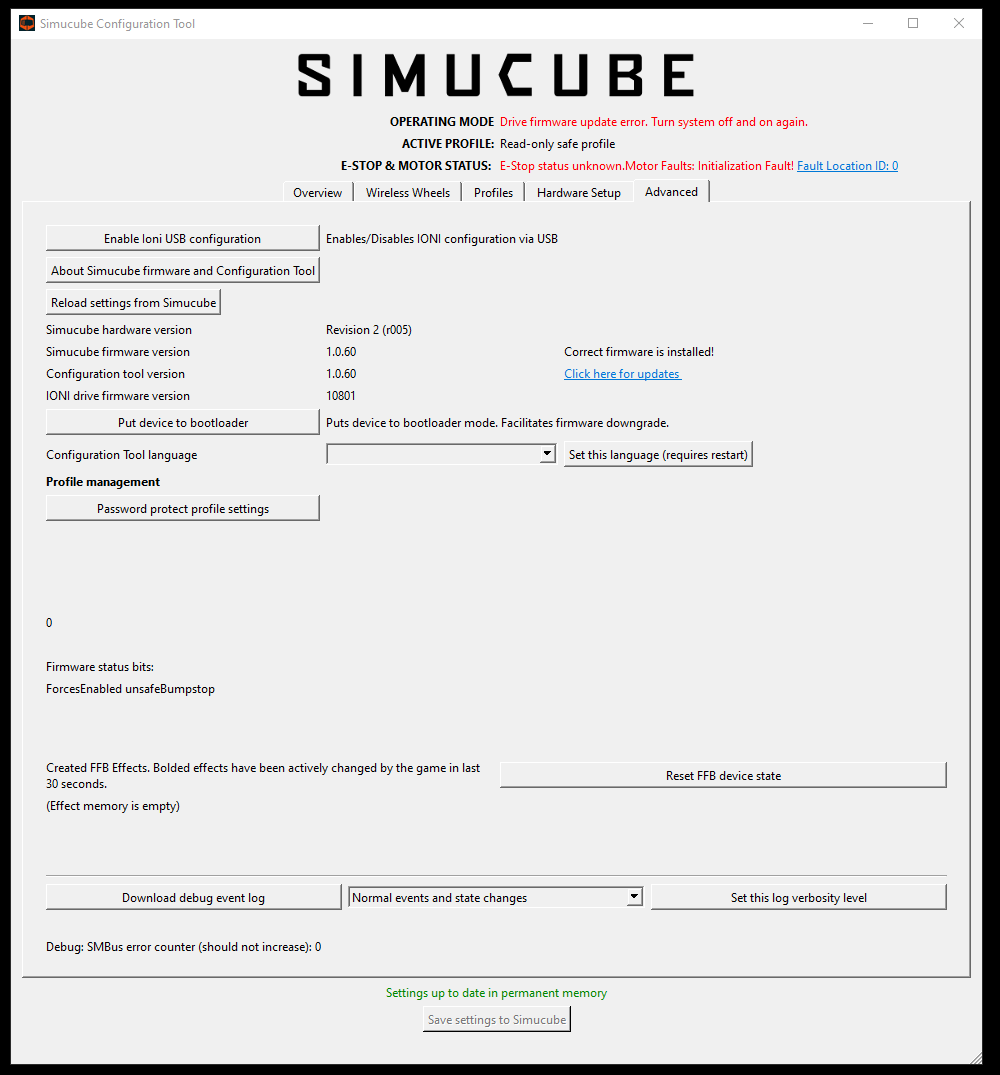
It is almost as if all the settings in Granity have reset for some reason, perhaps you reset all settings if you manually downgraded the servo drive firmware?
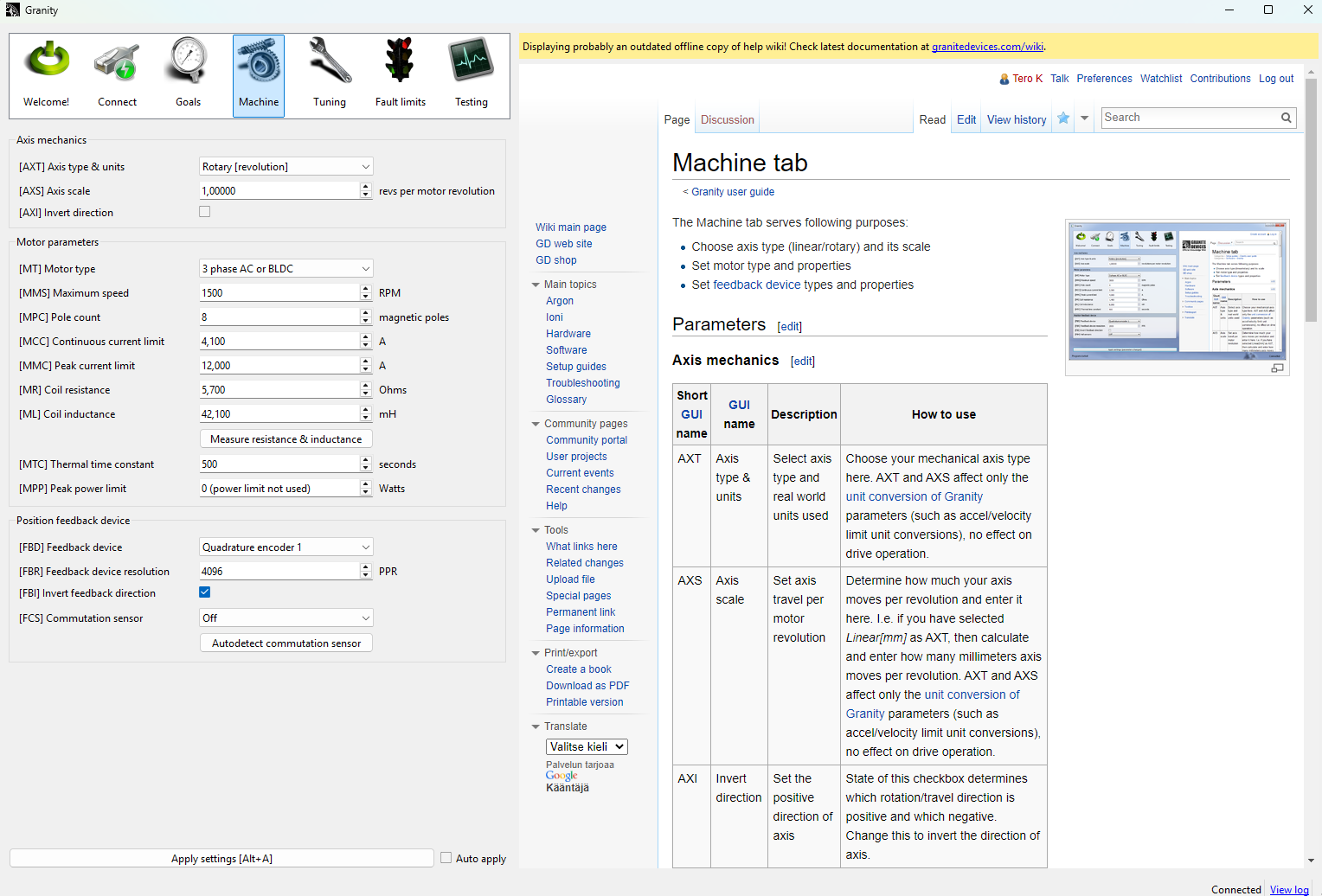
I see this from MMC=2 | MCC=1 which are very very weak settings for any typical motor used for Simucube 1.
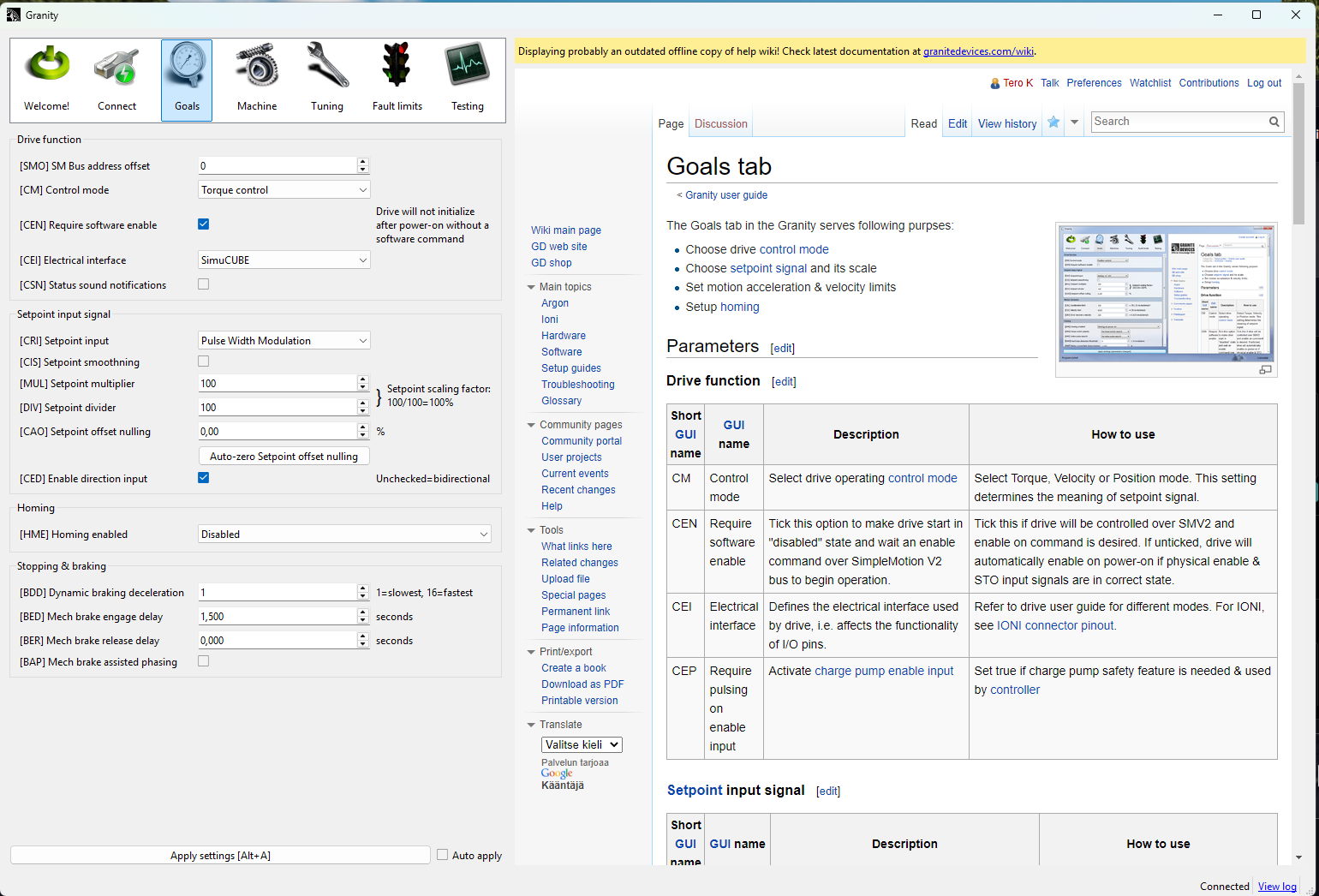
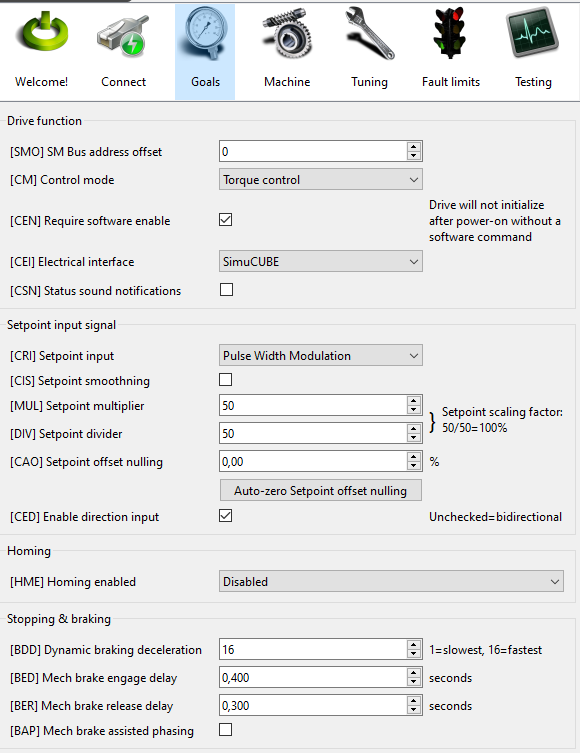
192002 fault is just that the servo drive is waiting for the software enable toggle, which has to be like that for Simucube 1 purpose. Simucube firmware automatically always switches the setting “require software enable” to ON.
Yes, that’s exactly how it was, and I wanted to save the settings. But I forgot.
So which motor do you have? Maybe someone can provide correct settings for it.
Lenze MCS 12H15-C40B0-A19N-ST5S00N-R0SU
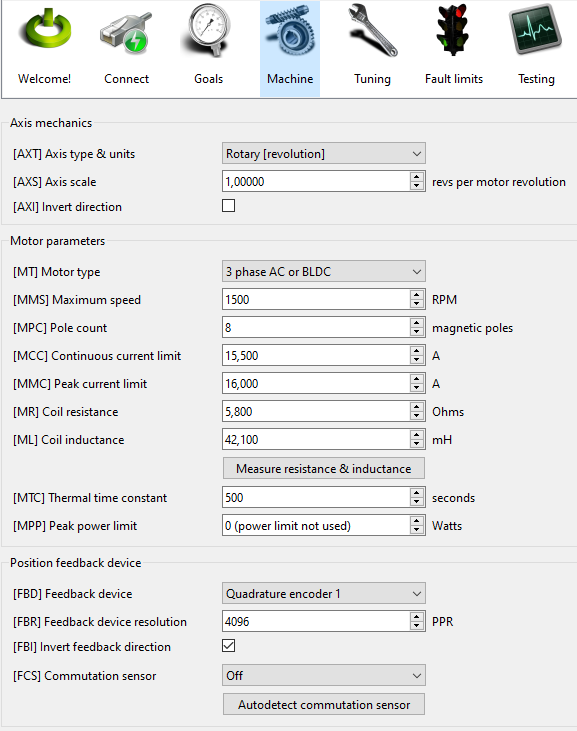
Possibly, if the encoder in your unit is the same - incremental quadrature encoder with 4096 PPR.
It does not hurt to try.
If the motor initializes but the steering wheel rotation in Simucube 1 tool is wrong → invert feedback direction is at wrong setting
If the direction is correct, motor initializes, but it feels like a tractor with large notches between positions → axi invert is wrong.
I have applied the setting. However, the motor is not initializing.
What else can I check/test to find out why the motor is not initializing?