Hello All,
There are often questions about which servo, what PSU to pick, which IONI controller, etc, when you are thinking about doing your Direct Drive wheel based on the SimuCUBE. After discussions with Esa at Granite Devices, I have decided to do a spreadsheet that will provide you with the base information required on the popular servos used by most people.
On this list, I have build and tested almost all servos shown.
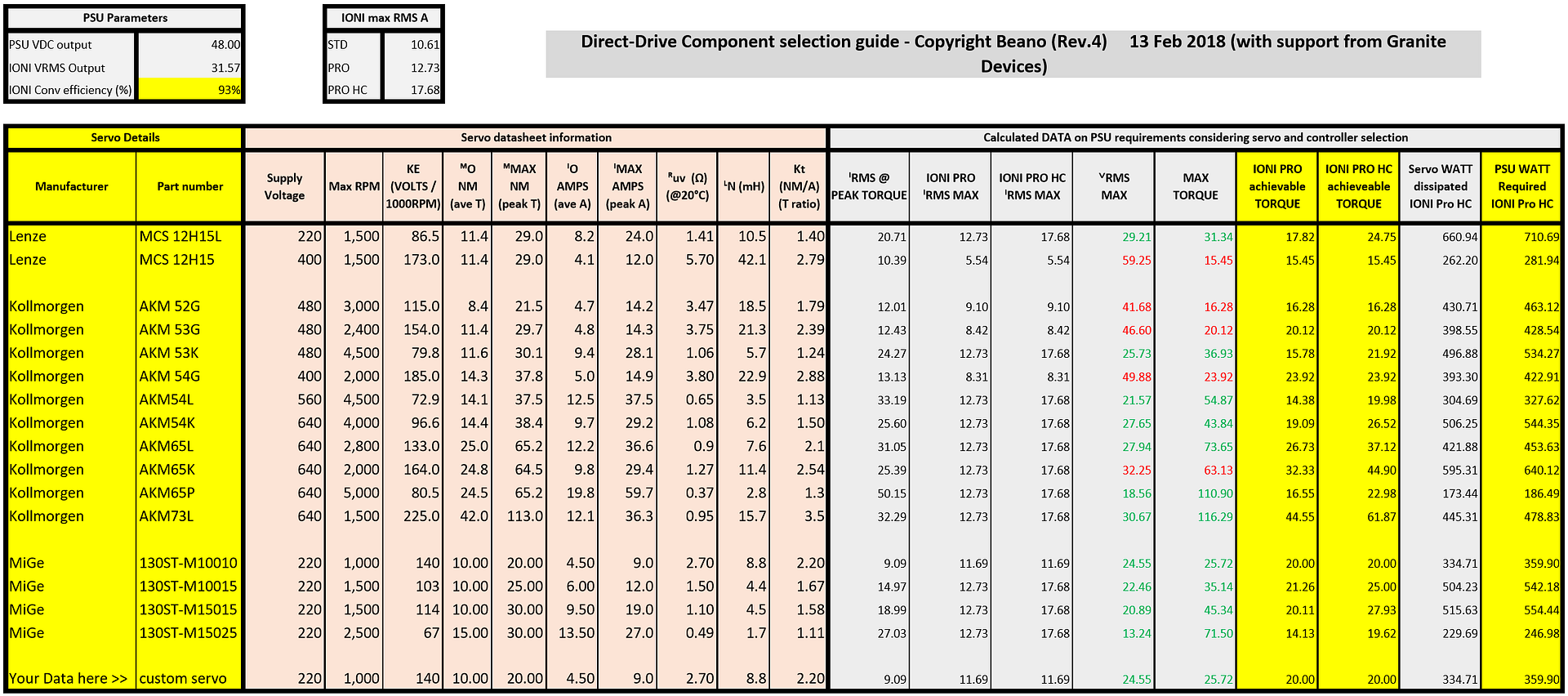
Please refer to the screenshot and attached PDF, it should provide a good guide to you. The columns in orange are really the only ones that will matter for most people. PSU selection based on max torque and IONI Pro HC controller.
edit: 13 Feb 2018:PSU Wattage requirements have now been corrected as per Tommi from Granite Devices input - use the Rev4 file, please. I have been conservative with IONI efficiency at only 93%, so you have headroom.
At some point I will add the 54K and 54L models, gents. Just in NZ now and traveling, lots of customer visits…blah…let’s see if I can do it on the flight back over.
Brilliant, thank you Beano. I am convinced now a NDR 480-48 is perfectly fine for a AKM54K build - it has 3sec. transient overload capabilities which will easily handle the worst case.
Looks cool and informative excel sheet Beano! However the copper losses are not actually calculated correctly as RMS current multiplied by line to line resistance because the current in synchronous sinewave commutated servo motor is not driven through the wye connected coils in that manner (ever) and therefore that way of calculating cannot give correct result. Small formula improvement is in place to get correct results in the sheet.
If one wants to calculate the copper losses, do the following 3 * (rms current)^2 * 1 phase resistance. (1 phase resistance is half of the line to line or phase to phase resistance that can be read from manufacturer spec sheet)
So why 3 times rms current squared, multiplied by 1 phase resistance? Because the sine wave(s) goes through each of the 3 phases. We can use the manufacturer given rms current for that. Think of individual sine waves going through all the phases one at a time, it does not actually matter that what is the order or phase shift among the sine waves when they go through the phases if we are just looking the rms power consumption.
Those were the copper losses but we cannot neglect the shaft output power. Shaft angular speed may reach 1-2 rps for example in SimuCUBE use. The shaft output power can be calculated 2Pif*Torque (Nm). An example of this: copper + other electronic losses ~300W shaft output 20Nm and angle speed 1 round per second, the combined power requirement is 300W + 125,66W = 425,7W
There are more specific ways also where one can calculate per phase power consumption but for that one needs a bit of trigonometry in determining that what is the angle dependent amount of current driven through each phase. In any case for this purpose knowing such is not necessary at all when one is determining that how powerful PSU is needed in overall. Tero could explain this in more lengthy & detailed way per phase power consumption if he has the time at some point and if someone is interested.
That would explain why the NDR Power supply can’t handle the Large Mige at 25A (it’s close but it Faults with low voltage at times) even though the initial calculations put it within range to be able to.
The large mige at IONI Pro HC max current consumes ~517W of power in stall situation, power requirement increases if the shaft outputs power. If we would consider some extreme case, like 2 rev/s and in the same time output the peak torque, then the power consumption could reach 860W. The previous is more like theoretical, not like actual situation. Real life is more like about 680W-690W range (or less) for the peak power consumption with that motor (1 rev/s @ 27Nm).
File updated with a new version in the first post, now including corrections based on Tommi’s comments. There also is a Dropbox link to download the pdf.
Thanx for that, Tommi, should be a bit more accurate now, certainly good enough for our consumption.
edit: 25 June 2018: Added a significant amount of additional servos, especially the smaller series MiGe units, for those that might want to use a smaller-footprint and lower torque servo. 8x MiGe and 3x Kollmorgen servos added. See the highlights in blue. Use this Rev6 file now, please.