Hello, what would be the conversion formula to get your .595:1 ratio on to an Ultimate wheel?
ie: if I have TD set to 100% 32nm, what would I need to set in iRacing (ie: your 42nm) to maintain the same strength the you have?
Hello, what would be the conversion formula to get your .595:1 ratio on to an Ultimate wheel?
ie: if I have TD set to 100% 32nm, what would I need to set in iRacing (ie: your 42nm) to maintain the same strength the you have?
32 (Ultimate 100% strength) divided by .595 (specific Output) = MAXFORCE value.
32/.595 = 53.781
So Max force at 54Nm with be a tiny tiny bit less at .592:1 (32/54=.59259)
Are you talking about a Porsche GT3 or an ACTUAL GT3 Race car?? Just curious as I have driven my friends 2018 Porsche GT3 RS and it is one heck of a car. Porsche Instructors say it is very close to a previous generation Porsche Cup Car…
After driving it I did some comparisons to iRacing and felt that (with the settings above for my wheel) the Street Spec Porsche GT3RS is about .45:1 Specific output with the Prior Gen Cup Car, However, that being said if you put the GT3RS on slick tires that number would go up and would probably fall in the .5 - .6 range as Slick tend to load everything more given their maximum grip level increases significantly.
F1 cars are interesting though… I haven’t of course driven one but given the iRacing versions are built off of actual data fro the teams I would expect their relative differences to be correct (since iRacing holds are cars in the same force scope). With that the F1 cars are actually MUCH lighter in steering weight than most of the GT3 Race cars and even the lower ranked F3’s, etc… I was a little surprised at this until I though about the nature of the cars…
My theory is that the F1 cars do have additional steering boost to make them lighter in real life due to the tremendous additional forces exerted on the driver by way of G-Forces. This keeps a driver able to not completely deplete their energy by balancing their exertion as if they had IndyCar level non power steering weight in addition to Massive Cornering, Braking, and acceleration G’s, the drivers would be absolutely exhausted at the end of a race (which you actually do see every so often in IndyCars) but very, very, rarely in F1. Granted in Sim you don’t get the G-Forces so the car feels pretty light comparatively.
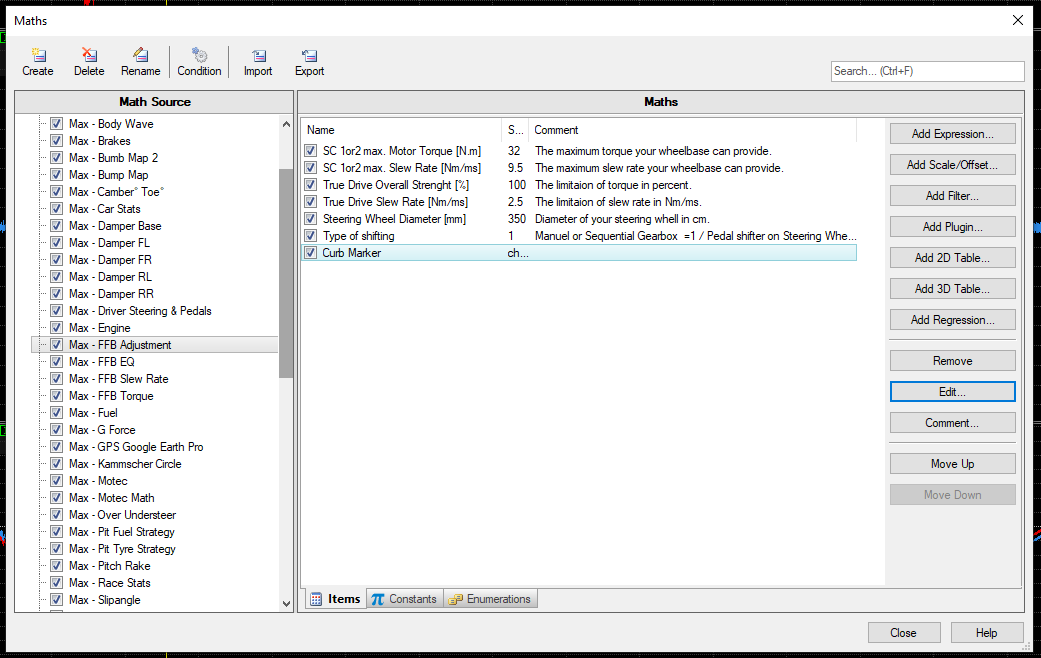
If you have a Motoec file from a few laps then I can give you very specific statements and tips for a better FFB.
Unfortunately, it only works with IRacing and RFactor2.
Yeah, Porsche GT3 RS
Ah thanks Brion! I didn’t realise it was such a simple Formula.
Do you by chance have a formula for working out the best slew rate for an Ultimate wheel?
Or is 3.25 a good setting for all wheels?
What’s slew rate and what does it do?
I believe, but don’t quote me, it slows down the reaction time of the wheel when lots of FFB is being sent to the wheel.
So if you go over a kerb, it doesn’t forcefully throw the wheel from side to side in a split second. It slows down the reaction time to make it smoother.
I think.
Yea the specific output is just a ratio of the actual output from the wheel to the output that the telemetry gives.
With Slew… No, that is something you sort of have to feel out. The thing to look for is if the wheel feels as if it is causing you to saw at it…
Most of the time that I notice this is on a return to center moment after a minor oversteer. Normally in a real car you should be able to control a slight oversteer with minor adjustments to the wheel. However a wheel that is too fast will snap back toward center at a rate that you as the driver cannot keep up with… This causes you to saw at the wheel a bit to regain control and find center where in reality you should be able to use just throttle control and slight inputs to bring the car back in line…
Some people like this quick snap back as it makes them feel the car is being reactive (and some cars depending on settings in the suspension or track surface can be(i.e older style nascar cars on an oval where they are setup biased and you se the car get loose and they ca hold onto it JUST until the put too much correction and it shoots to the wall) Problem is with an overly active return this shoot to the wall no longer has to do with the car but the return uncontrolled overcorrection of the wheel.
So it is something that does have to be played with and becasue I don’t have an ultimate I cannot really say what would be a good setting… However I would say that you will probably be around the same number as the Slew is a torque application over time.
F1 cars are, compared to F3, much more easier to steer when we talk about the force needed. Some of actual F1 drivers said that steering in F3 was very demanding, due to the lack of power steering.
It’s the acceleration of the motor. Lowering slew rate makes the steering more rubbery/realistic.
Turn it down to 1 and hit some curbs. You’ll notice what it does then.
The difference between 3.25 and unlimited is not so obvious, but once you go below 2 you’ll feel the difference.
I drive with slew rate 2.2. It’s a good compromise between detailed info, but a realistic/less robotic feeling.
We have TBW, Slew Rate limit, all these params limit physical potential of the servo.
You’ve paid extra for more reactive motor but run it on a fewer cylinders.
More “rubber” and wheel weight can be accomplished via Damper/Friction/Inertia, also Recon if you want smoother signal. It’s a more conventional, traditional way without resorting to “exotic” params very few understand and killing your servo potential in the process.
Overcomplicating things seems to be a trend among simracers.
no, lower value is less reactive. But outright 0 means that the filter is turned off.
Really, I thought it was changed to be the actual limit applied on the top of existing rate. Seems like it’s still absolute value of a Slew Rate. Thanks for correcting, may be a good idea make it look more meaningful in UI.
Yeah, we actually discussed it when implementing the slider for the effect. Either way it would be confusing in some way - if the slider was “inverted” compared to how it is now, the value on the slider would decrease when moving it to the right. Then again, we prefer technical explanation of an effect instead of just arbitary number. However in this case the technicality is what makes it confusing.
Same goes for the torque bandwidth limit filter if that was implemented as a slider…
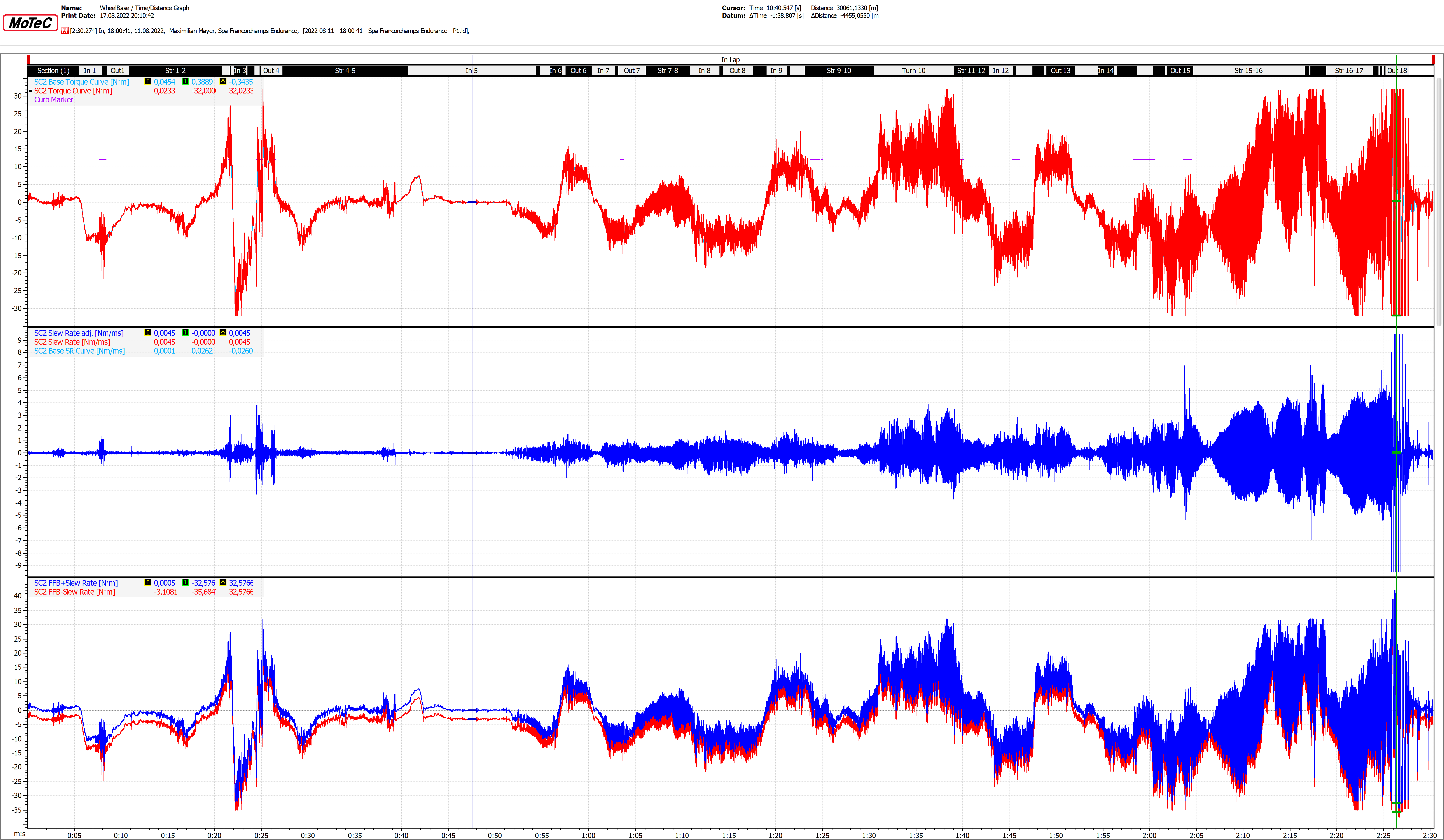
Slew Rate is the best “Effect” of the Simucube2! It is so POWERFULL. I use it simelar like a “Bass - Compressor” and you should do that too. You tune your FFB-Signal to its finest! Keep an eye Flat-Spots at the last half lap. Also the Crash at the End.
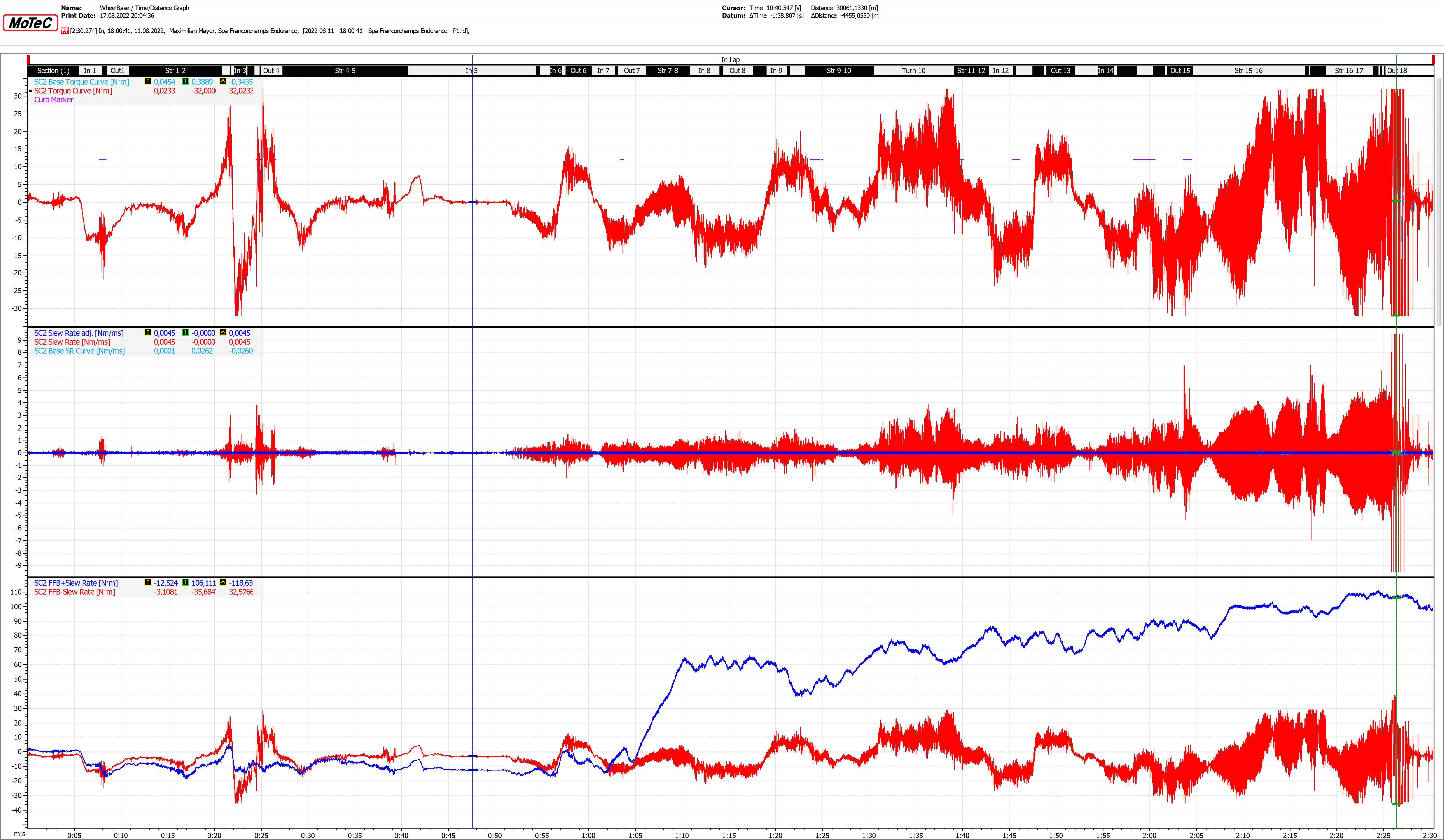
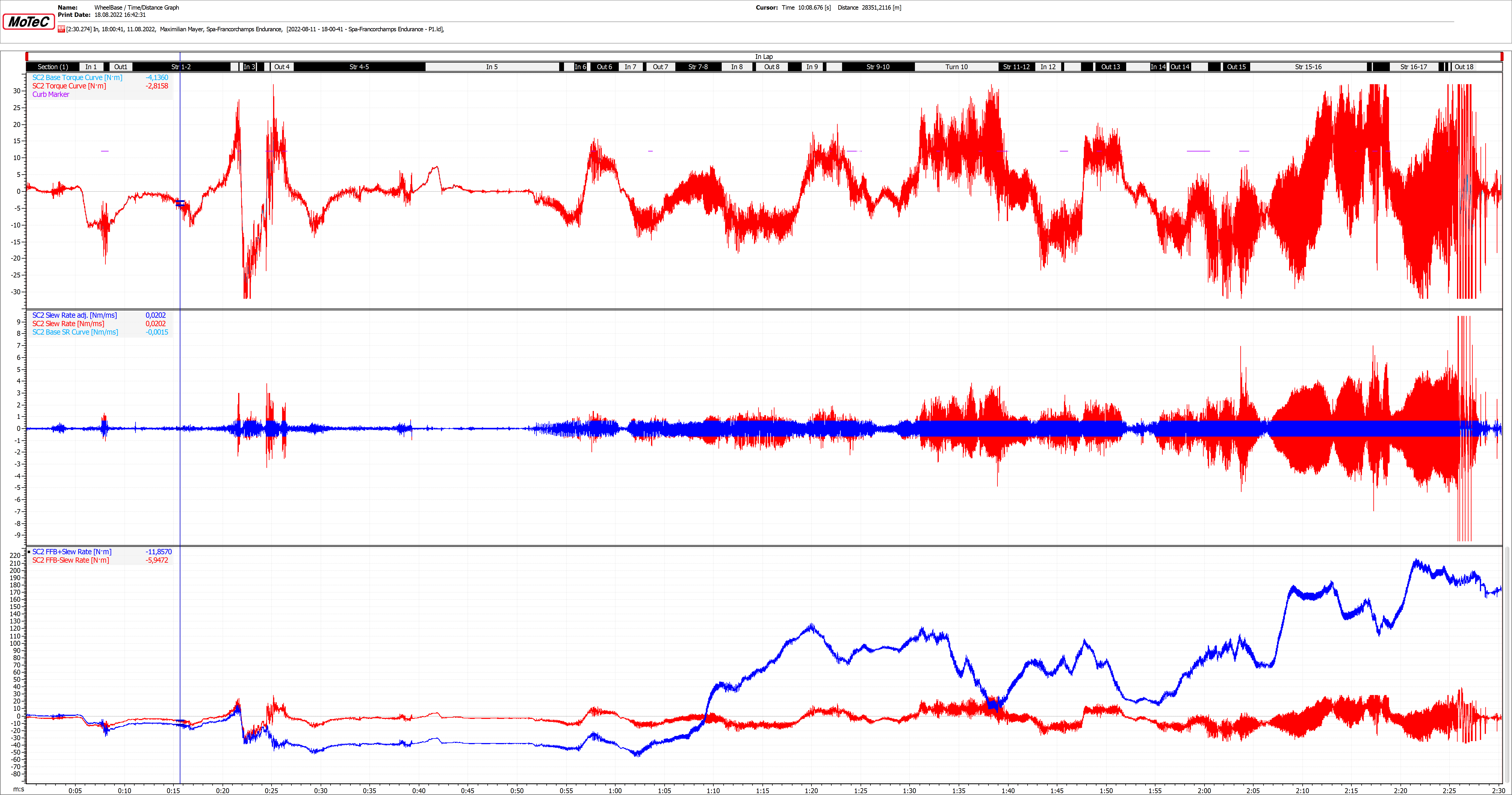
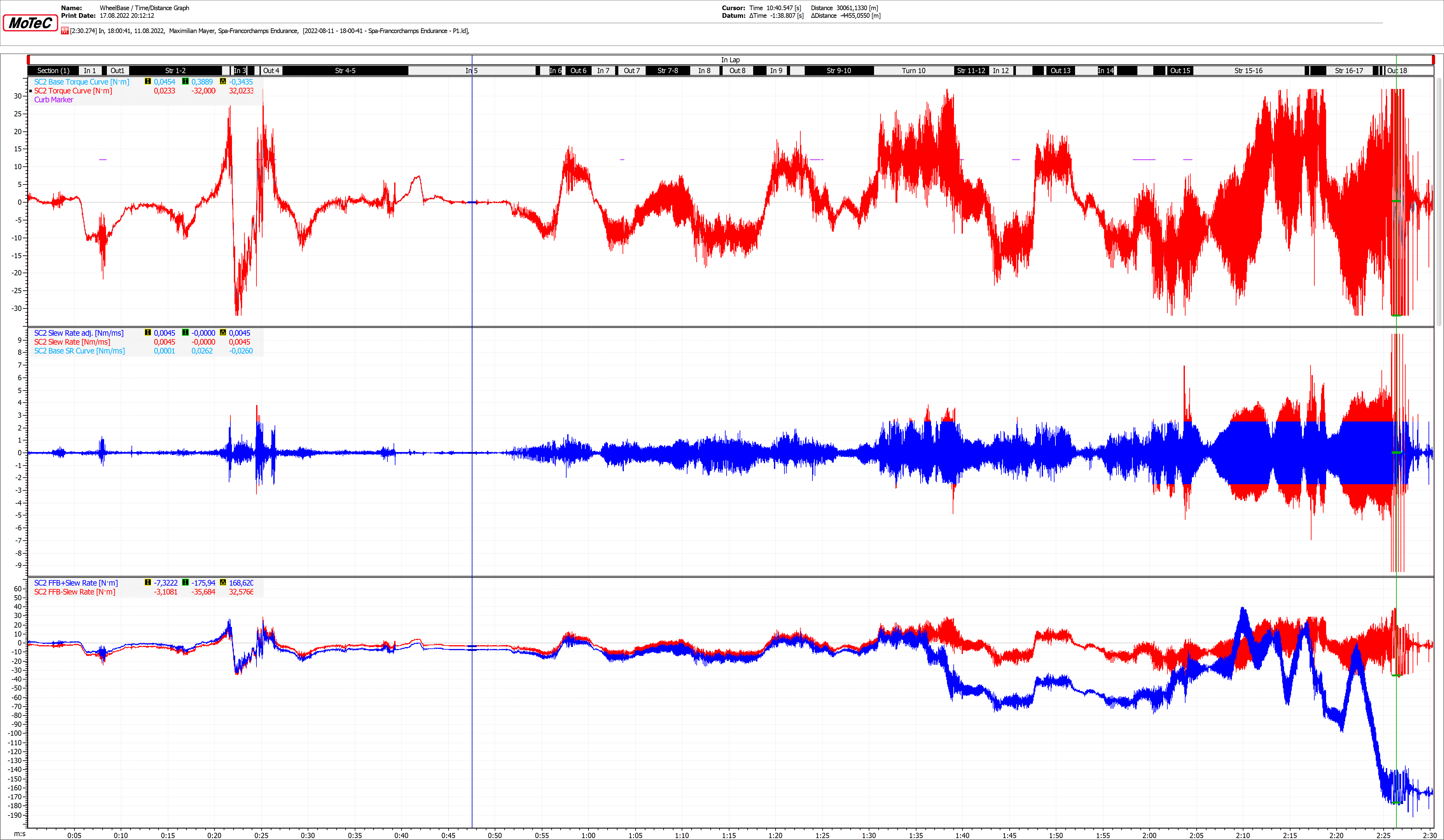
Slew Rate in dark blue…
0.1Nm/Ms
0.65Nm/Ms
2.5Nm/Ms
9.5Nm/Ms
If I read it right (probably not), it shows by how much at lower slew rate reaction of the motor deviates from, lags behind signal.
Cool graphs, btw, wish TD had some monitoring tool.
How do you capture all this data, including slew rate?
So all four screenshots show the same 3 graphs with different “Slew Rate’s” (0.1 /0.65 /2.5 & 9.5Nm/Ms).
On the first graph:
“SC2 Base Torque Curve[Nm]” shows the basic FFB-Torque…like curves for example and a bit of oversteering if it doesn’t require too much slew rate.
“SC2 Torque Curve[Nm]” shows simply the FFB signal output by (in this case) Rfactor2. So the “car multiplier”(aka PreAmp) has an influence on the curve, but also the settings in the .json files.
“Curb Marker” tells me if I’m currently driving on curbs. The reason is that I get a hind where the frequencies come from that bother me. In “La Source” you can see it quite well. (Doesn’t look like a big deaL, but it’s super practical =) Especially because the games aren’t 5-star orchestras. Hope no one will be mad at me, but anyone who has ever worked with Cubase or Wavelab knows that the CPU places limits on signal generation and SimRacing is signal generation.
The second graph just shows different slew rates.
“SC2 Slew Rate adj. [Nm/ms]” shows me the slew that I would like to visualize. In other words, I recreated the “True Drive- Slew Rate -Effect” in Motec. As above (0.1/0.65…). I used to call it Adjusted (adj.).
“SC2 Slew Rate [Nm/ms]” is the slew rate the game wants, but limited by the maximum slew rate of the wheelbase. I always put the slew rates on top of each other… so you can see where the signal is being compressed. Is then the blue curve before the red curve.
“SC2 Base SR Curve[Nm/ms]” shows me the slew rate of the “SC2 Base Torque Curve [Nm]”. Namely, if you give your Simucube2 less slew rate than it needs for cornering and oversteer, you’ve definitely gone too far.
With the third graph I do the calculation back into a torque. So the red slew rate curve, which is only limited by the maximum slew rate of the SimuCube, and the blue slew rate curve, which is changed by our True Drive setting. Unfortunately, this is then distorted (NOT IN THE GAME, ONLY IN MOTEC), but you can tell by the thick curves in the flat spots. So based on the ratios and the peak to peak values. For example, with the 0.65Nm/ms slew rate I reduce the torque of the crash from ~54Nm to ~10Nm… i.e. reduced by 44Nm. So you can let children play with it with a clear conscience. 
Slew rate and static force reduction are extremely helpful imo. Slew rate limitation can make the difference when one has a huge crash at high speed. Static force reduction gives the opportunity to use more torque in general, while certain situations (fe Silverstones high speed combo Copse/Maggotts/Becketts) still can be driven at a full length race without getting too tired. Both don’t filter anything out of the amount of FFB information. Damping is adding latency, something friction does not, although you will loose fidelity/speed at the shaft with it.
Both are problem solver rather than anything else. You can use ULLM to compensate the latency you created with damping and friction.
These diagrams are interesting. To have something similar in TD is totally unnecessary. If one is interested in engineering there is sure (as we can see) plenty of 3d party software.
As a driver you don’t need to interfere with the job of engineers. Even you are good at it: no-one wants you to do such things. Be fast, win the race and let them do what is necessary for you to win.
If some already have a problem to understand what a limitation of a defined maximal value is, then TD sure doesn’t need integrated mechanical physics or telemetry implementation. This would only need a real time connection, which is exactly what brought up resistance